
工业机器人深度节能研究
2021-09-17 09:07胡觉醒孟令丰寇程翔
中国新技术新产品 2021年13期
胡觉醒 乔 慧 孟令丰 寇程翔
(吉利汽车集团有限公司智能制造部,浙江 慈溪 315300)
0 引言
随着生产自动化水平的不断提升,工业机器人已经逐渐代替人类被广泛应用于各个工业生产领域;但是它在实际生产工作中会产生大量的能耗。为实现制造行业的可持续发展,需要注重在制造过程中深化节能自动化技术的设计理念[1]。同时,为了保证工业机器人的高能效利用率,需要使用能耗管理策略降低其能耗消耗[2],从而实现可持续发展的目标。
1 工业机器人深度节能概述
工业机器人在生产运行和待机状态下均会产生能耗,一般将生产运行产生的能耗称为生产能耗,可以通过减少机器人外部轴工具、优化机器人轨迹(减少非必要的减速和加速过程)等方式降低该能耗;将非生产待机状态产生的能耗称为待机能耗,目前针对该能耗的自动化解决方案很少,只有部分制造公司通过硬件设备和编程的办法来控制机器人电源的开关,以达到减少能耗的目的,该技术属于常规的资金投入方案,存在很多弊端。在不增加成本的前提下,降低待机能耗是每个企业追求的目标,通过技术研究和实践发现,机器人深度节能(开机和关机中间能量平衡状态)可以通过西门子的功能块来实现睡眠和能耗显示,通过自创的魔术包数据来触发机器人开机,以实现唤醒功能。
1.1 PROFIenergy协议
PROFIenergy是由PI(PROFIBUS & PROFINET International国际组织)定义的一个基于PROFINET的生产设备能源管理标准。
PROFIenergy的中心任务是利用生产间隙时间里“通过网络”功能来关闭所有不需要的耗电组件,需要工作的组件电源保持激活状态,以实现面向未来的能源管理。
1.2 PROFIenergy指令
PROFIenergy定义了标准指令来控制和查询设备状态的模型。
1.2.1 控制指令
控制指令是控制设备在工作模式和节能模式之间的切换。
1.2.2 查询指令
查询指令可以查询设备的能耗状态、PROFIenergy状态以及查询设备支持哪些PROFIenergy功能。
1.3 PROFIenergy组件
1.3.1 PROFIenergy的I/O控制器
控制器向下级设备发送各自的PROFIenergy命令,但也有可能在其中表示完整的PE智能(状态模型)。生产过程也可以由该控制器进行控制,但这不是强制的。
1.3.2 PROFIenergy设备
该设备可以是简单的PROFINET I/O设备或驱动器,也可以是更复杂的设备,例如工业机器人。
1.3.3 PROFIenergy功能块
CPU的功能“I-device”(智能I/O设备)使PLC与I/O控制器交换数据成为可能,因此,可以使用CPU作为预处理部分进程的智能单元。在其作为I/O设备的角色中,I-device连接到一个“更高级别”的I/O控制器。预处理是通过CPU中应用程序的“I-Device”功能来保证的,这是PROFINET的一种特殊功能。
1.3.4 PROFIenergy状态模型
每台机器或系统基本上都有2种状态:“ON”或“OFF”。这些状态也代表了系统的生产力。对能源来说,“ON”状态表示功耗最高,“OFF”状态表示功耗最低。理想情况下,“OFF”状态下的功耗为0。通过PROFIenergy可以在2个自然状态之间定义节能状态,这使在非生产时间将系统带入一个更“有利”的能量状态成为可能。
如图1所示的 PROFIenergy状态模型展示了不同状态、操作时间和能量损耗之间的关系。
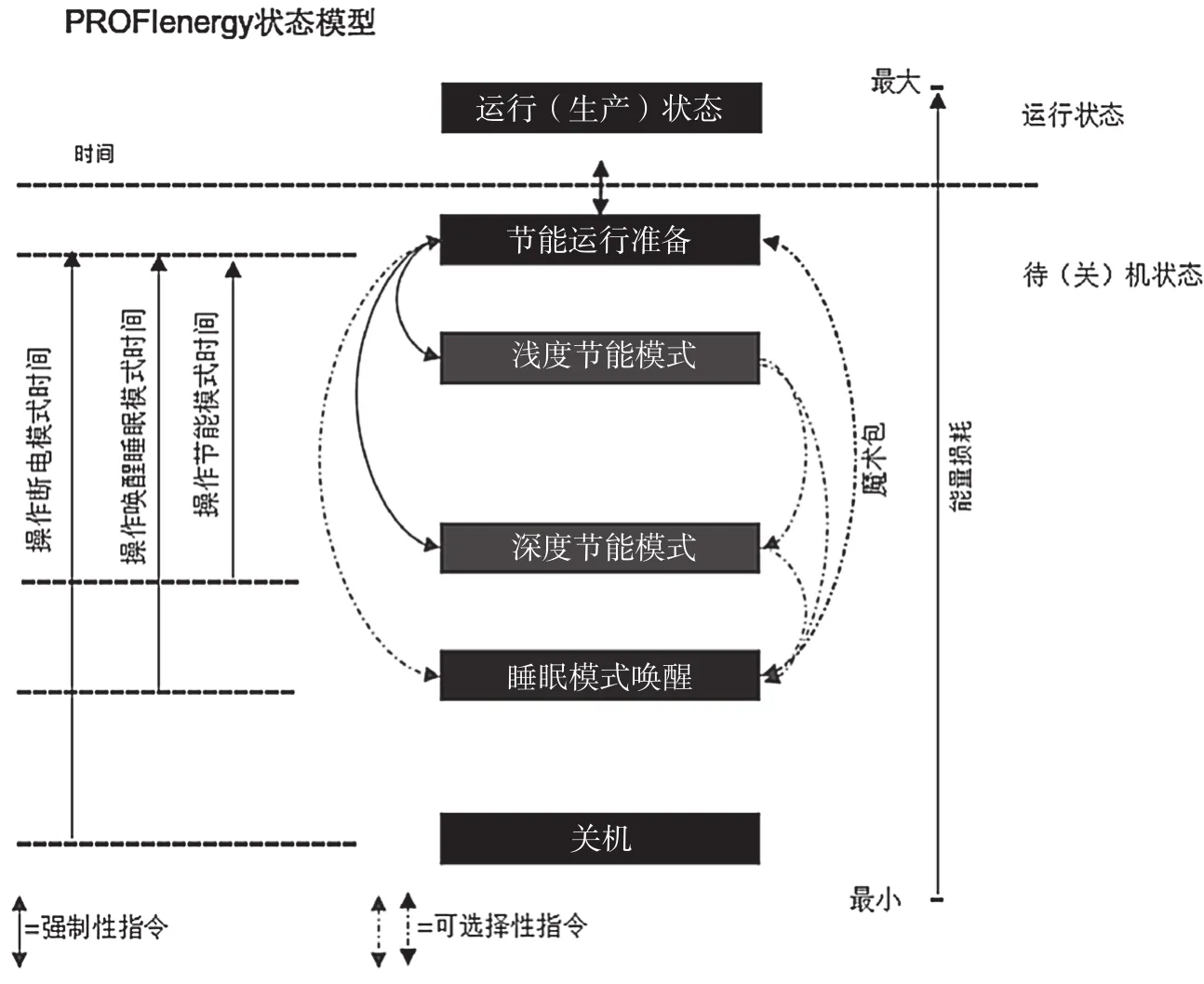
图1 PROFIenergy状态模型
PROFIenergy模型系统通过主要指令或更高级别的系统来激活/取消激活系统的节能功能。而I/O控制器将PROFIenergy命令“Start”/“End”发送给PROFINET设备。由该设备解释PROFIenergy命令的内容,从而设置开开启、关闭或初始化设备节能。PROFIenergy还有其他功能,可以在待机期间检索设备信息,该信息可以让用户及时查看设备在睡眠状态下的能耗情况。
2 工业机器人应用中节能场景
工业机器人的节能场景有很多,例如待机的电能耗、轨迹的电机扭矩力能耗以及负载质量能耗等,该文重点介绍待机能耗下的5种应用场景。
2.1 在短暂的时间停顿中节省能耗
短暂的休息可以是喝咖啡或吃午饭,时间从几分钟到一小时不等;其目的是在不影响系统可用性的情况下节省能源。也可以在短暂停顿期间,仅关闭部分能耗机器人。短暂的节省待机能耗如图2所示(短时间能耗图)。
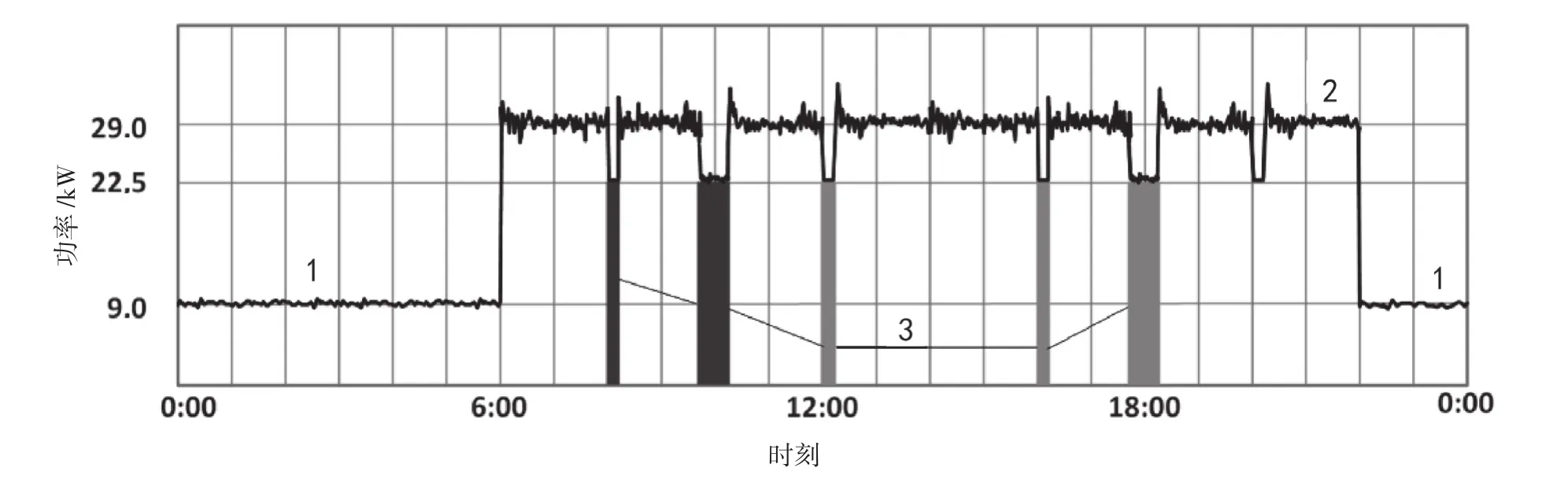
图2 短时间能耗图
2.2 在长时间的停顿中节省能耗
该停顿通常出现在晚上和周末。由于暂停时间相当长,因此机器人进入节能模式,降低能耗,从而在暂停期间节省最大数量的能量。长时间的节省待机能耗如图3所示(长时间能耗图)。
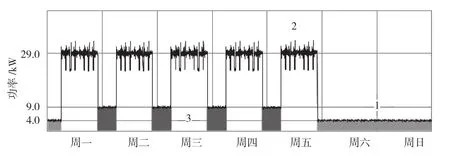
图3 长时间能耗图
2.3 在计划外停机时间中节省能耗
通常,这种类型的暂停(停机)没有计划,中断的时间点和持续时间是无法预见的。然而,在该情况下,也要节约能源。例如,如果物质(水汽)流动不稳定,就会出现中断的情况。由于PROFIenergy还可以协调机组之间的复杂关系,因此在该情况下也可以达到最佳的节约能源的效果。
2.4 有计划停机时间中节省能耗
有计划停机中断的时间点和持续时间是有计划的。例如在缺料和维护保养时,就会出现该待机状态,可以根据现场情况选择最佳的节约能源的方案。
2.5 测量和可视化能耗
PROFIenergy还允许以统一格式从设备中读取能耗数据,例如电能耗数据。在操作过程中,这些数据被收集并显示在操作面板上。确保了可以使用统一的格式和结构对目前机器人在运行和待机中可用的测量数据变量进行进一步处理和可视化展示。
3 工业机器人节能存在问题
工业机器人在传统的节能技术方案中是通过PLC控制继电器实现断电工作,机器人断电后再重启,就会以冷启动方式再次上电,也就是恢复初始状态,不再记忆以前的程序状态。该技术方案如图4 所示(传统节能方案),存在的具体问题如下。
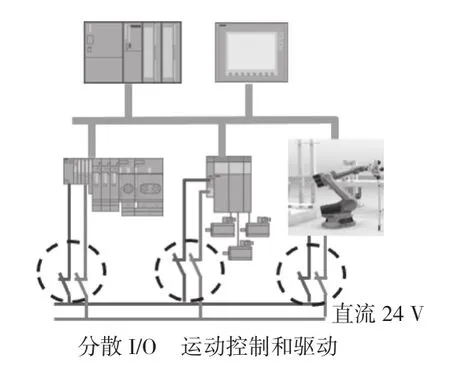
图4 传统节能方案图
3.1 添加硬接线和硬件费用昂贵
传统市场上对工业机器人节能的方案就是单个机器人添加继电器和硬接线,再通过PLC的信号点进行编程,该方案工作量大、费用昂贵且应用环境局限性大。
3.2 机器人容易丢失零点
在传统硬接线方案中,工业机器人不可以在正常生产过程中进入睡眠节能模式,防止机器人位置坐标丢失,机器人控制柜内的蓄电池没电或者电压严重不足时,就无法支持控制PC延时关机。寄存器数据容易丢失,机器人零点自然丢失,不利于生产。
3.3 恢复生产时间长
在机器人通过继电器断开总电源后,机器人启动方式改为冷启动,该启动方式会扫描系统文件夹进行初始化运行,单台机器人车型多的程序内存占比高,冷启动时间大约为5 min,在天气冷的情况下时间会更长。
3.4 重启故障率高退程序
工业机器人强制断电后无法记录进入程序的具体位置,存在信号丢失的情况,系统运行信号丢失就会报错,特别是强制性断电、编码器丢失位置、报位置错误信息以及系统报系统错误等。
4 新技术路线与方案
要实现工业机器人深度节能的功能,就需要从2个方面进行工作接入:可编程控制器(PLC)的硬件选型配置和工业机器人的控制柜控制电路及网络配置。
4.1 可编程控制器方面
通过2个实例来介绍可编程控制器通过PROFIenergy访问工业机器人。使用功能1控制工业机器人进入和退出节能模式,需要提前选定好硬件版本,硬件配置见表1。使用功能2读取工业机器人的能耗数据,需要提前确定好软件版本,软件配置见表2。

表1 硬件配置表

表2 软件配置表
4.1.1 硬件组态
首先将工业机器人控制单元组态到可编程控制器的PROFINET网络下;其次,将工业机器人板卡诊断地址设为2035,为后续编程做好准备;最后,将其编译下载到硬件组态中。
4.1.2 使用功能1控制机器人进入节能模式
编程:打开S7程序库,引用PROFIenergy程序块,这里说的是功能1和功能2。将功能1加入主程序中,并为其分配相关参数,见表3。

表3 功能参数表
4.2 启动和短周期退出节能模式
执行程序,当M10.0上升沿时,可编程控制器将PROFIenergy命令(启动)发送给工业机器人,工业机器人进入节能模式,关闭编码器及电机电源,节能模式激活。当M10.2上升沿时,可编程控制器将PROFIenergy命令(停止)发送给工业机器人,工业机器人在1 min以内可以恢复编码器及电机电源,退出节能模式,机器人开始运行,超过1 min就无法退出节能模式,需要重启机器人退出节能模式。
4.3 自创长周期唤醒功能包
采用于西门子PROFIenergy程序块使机器人进入深度睡眠后,一定时间内机器人的网络通信彻底断开,传统的PN通信无法响应。只能使用AMD公司推出的远程唤醒协议,即发送远程唤醒数据包,Magic Packet虽然只是AMD公司所开发的一项技术,但是受到了绝大多数网卡制造商的支持。从根本上来说,它是硬件设备提供的一项管理功能,该功能可以当电脑处于关机或休眠状态时,通过给网卡发送特定的数据包,从而命令网卡向主板发送开机指令,进而实现上电开机。唤醒工业机器人,在标准程序里做好统一模板,只需要客户填入状态信息即可,模版如下。
IF"PROFIenergy".HMI.START(需添加所有工业机器人状态条件)
THEN
"PROFIenergy".START:=TRUE;
ELSE
"PROFIenergy".START:=;
END_IF;
IF"PROFIenergy".HMI.EndTHEN(不做变更)
"PROFIenergy".End:=TRUE;
ELSE
"PROFIenergy".End:=;
END_IF;
IF"PROFIenergy".HMI.InitializedTHEN(不做变更操作前初始化)
"PROFIenergy".Initialized:=TRUE;
ELSE
"PROFIenergy".Initialized:=;
END_IF;
"PROFIenergy_FB_v1.0_DB"(START:="PROFIenergy".START,
End:="PROFIenergy".End,
Initialized:="PROFIenergy".Initialized);
"PROFIenergy".Display.IEC_Timer.PT:=T#1000s_0ms;(时间最大值设定)
"PROFIenergy".Display.IEC_Timer.IN:="PROFIenergy".Display.START_Memory;
IF"PROFIenergy".Display.Sleep_Time<1000THEN
"IEC_Timer_0_DB_3".TONR(IN:="PROFIenergy".Display.IEC_Timer.IN,
R:="PROFIenergy".Display.IEC_Timer.Q,
PT:="PROFIenergy".Display.IEC_Timer.PT,
Q=>"PROFIenergy".Display.IEC_Timer.Q,
ET=>"PROFIenergy".Display.IEC_Timer.ET);
"PROFIenergy".Display.Sleep_Time:=ULINT_TO_REAL(TIME_TO_ULINT("PROFIenergy".Display.IEC_Timer.ET)/1000/60);(时间最小单位设定)
"PROFIenergy".Display.Every_Energy:=0.075;(不做变更)
"PROFIenergy".Display.Rob_Counts:=20;(机器台数设定)
"PROFIenergy".Display.Total_Energy:="PROFIenergy".Display.Rob_Counts*"PROFIenergy".Display.Every_Energy*"PROFIenergy".Display.Sleep_Time;(不做变更)
ELSE
"PROFIenergy".Display.Sleep_Time:=0;
END_IF;
4.4 使用功能2读取工业机器人能耗数据
功能2编程:打开S7程序库,找到PROFIenergy Block块目录下的功能2。将功能2加入主程序中,并为其分配相关参数,见表4。

表4 能耗数据表
4.5 读取有功功率、功率因数和总的能耗
执行功能2程序,当M30.0上升沿时,可编程控制器将PROFIenergy命令(能耗测量)发送给工业机器人,将工业机器人应答的数据保存到接收缓存区,见表5。

表5 节能参数表
4.6 工业机器人方面
由于工业机器人处于深度节能状态,因此工业机器人控制柜接线会根据先后时序进行断电,并不是同时全断。CCU版上的X302是SIB预留电源,不可接在电源模块上作为备用。工业机器人通过网络配置软件WorkVisual 进入选中的PROFIenergy选项,选中EnablePROFIenergy栏,对与可编程控制器之间的通信进行响应时长的设定,需要配置最低响应时间、操作时间和触发时间,详细参数见表6。工业机器人处于运行模式时,需要在外部使用自动模式,运行指针在轨迹点上。机器人关机模式选择休眠,方便工业机器人唤醒时的记忆依然在之前的程序,不会因为睡眠导致退程序。

表6 机器人时间表
5 深度节能后优势分析及收益
工业机器人深度节能功能的实现,标志着制造行业自动化水平达到了一个新高度,可以通过软件编程的方式最大程度地实现降低能耗的目标,达到真正的零投入降本增效的目的,具体可以从以下5个方面叙述。
5.1 工业机器人待机能耗方面
工业机器人在待机情况下能耗为200 W~250 W,使用机器人深度节能功能后,工业机器人待机能耗46 W~57 W,节约能耗78%。
5.2 有形经济收益方面
工业机器人的型号不同,其所节约的电能也不同,根据常用机器人型号计算:一周生产5 d,一天10 h,0.6元/kW·h,一个基地500台机器人,假设共计10个基地,可以节约2 721 264元。
(10h×5d+48h)× 52(周) × 0.178(kW/h)×0.6(元 /kW·h)× 500(台)×10(个)=2721264元。
5.3 运行效率方面
人工单台工业机器人关闭和开启电源总时间大约为6 min,开启深度节能功能后,多台工业机器人关闭和开启电源总时间约为2 min,运行效率提高300%。
5.4 人员管理效率方面
现场有多条线体时,需要多人操作工业机器人的电源,开启深度节能功能后,1个现场配置1个人就够了。
5.5 安全故障方面
工业机器人深度节能功能并非彻底关闭机器人电源,而是保留部分通信电路。保证报文可以接收,故障失败率低,工业机器人不会频繁报警,对系统没有影响,系统安全可靠。
6 结语
综上所述,在为工业机器人添加深度节能功能时,选择正确的硬件和软件版本,需要提前在PLC中进行相应的硬件组态编辑数据块,机器人选择VS8.3及以上系统,需要在前期网络配置和接线中制定标准技术要求,避免后期因现场修改程序而影响生产,将该技术路线所述的功能作为可编程控制器和工业机器人标准软件的扩展功能,为工业机器人降低能耗提供基础数据配置,不依赖线体商和厂家,通过自主开发的魔术包唤醒工业机器人的技术,为工业机器人节能功能提供了强有力的支撑。
猜你喜欢
资源节约与环保(2022年8期)2022-09-20
公民与法治(2022年6期)2022-07-26
哈哈画报(2022年5期)2022-07-11
昆钢科技(2022年2期)2022-07-08
当代水产(2021年10期)2022-01-12
大众文艺(2020年8期)2020-04-21
华人时刊(2018年15期)2018-11-10
自动化博览(2014年9期)2014-02-28
自动化博览(2014年4期)2014-02-28
电子设计工程(2014年17期)2014-02-27
