
移动式医疗服务机器人系统设计
2021-09-17 04:53宋倩倩李晓彤
电子制作 2021年16期
宋倩倩,李晓彤
(泰山学院,山东泰安,271000)
0 引言
随着经济社会的不断进步与快速发展,在现代科学进步技术的不断推动下,医疗器械技术也随之不断地快速发展和不断创新,在此背景下,用于健康医疗的新型智能医生机器人应运而生,为我国现代健康医疗行业注入了新的技术活力。但现阶段正在研究或是已上市的机器人大多存在功能单一的特点,容易造成医院内采用多种机器人的情形,在人流较多的医院不利于开展工作。以新型冠状病毒肺炎来说,该新型冠状肺炎病毒传播急性感染肺炎速度快、危害大并且范围广。因其病毒传播的特点,医护人员不得不全身武装对病人进行监测治疗,不仅加大医护人员的自身负担,也增大了医护人员的传染力度。
本文移动式医疗服务机器人最主要的体现便是多功能化,实现一机多用,既可代替医护人员进入隔离区监测病人体温询问病患相关身体情况,同时也可完成药品食物运送并进行消毒,可降低医护人员进入隔离区的次数,减小受感染概率。
1 移动式医疗服务机器人工作原理
机器人采用多传感器融合技术,通过单片机总体控制红外测温,行驶与避让,语音识别与交流,自动回充四个环节实现,同时利用大数据云端及无线对讲原理实现人机交互。
机器人行驶至用户身边进行非接触式测温。测温后机器人会询问用户需求并反馈到医生的电脑或手机端。医生可以选择以视频和语音直接与用户交流或以文本形式将答案反馈给机器人,机器人将显示并朗读内容。当机器人电量过低时,若机器人正在工作中,会将工作转接至其余空闲机器人然后返回充电,若机器人处于空闲,返回期间不会接收用户。其总体设计示意图如图1所示。

图1 总体设计示意图
2 系统硬件设计
本文以STM51为核心板器件,采用多传感器融合技术。由STM51单片机为中心控制处理器,在按规划路线行驶到指定位置时,超声测距传感器与定位传感器共同作用,完成指定任务;行驶途中红外测温传感器实时作用,在进行播报与交流时,语音互动模块调动大数据云端,将相关指令反馈给中心控制器进行播报。多传感器工作互相配合,共同控制完成相应活动,实现其功能。具体功能实现如图2所示。

图2 硬件实现构成图
■2.1 红外感应测温模块
测温仪表部件主要采用新型无接触式红外体温温度测量,红外线光学测温仪(infrared thermometer)由红外光学测温系统、红外射线探测器、电信号图像处理器、温度变化指示器及其它附属激光瞄准器等部分构成。由于任何感测物体在温度高于绝对零度 (-273℃) 时都会从外表面发射大量的红外线,温度传感器可以接收这些红外线,以获得高于感测物体温度值的数据,所以采用热敏感探测器,即可在获得最小温度误差以及外界环境温度对于传感器测量的影响而得到被测者的体感温度。温度会由服务器实时上传云端并由后台医护人员实时监测得到体温变化曲线,从而对病人做出下一步治疗判断。
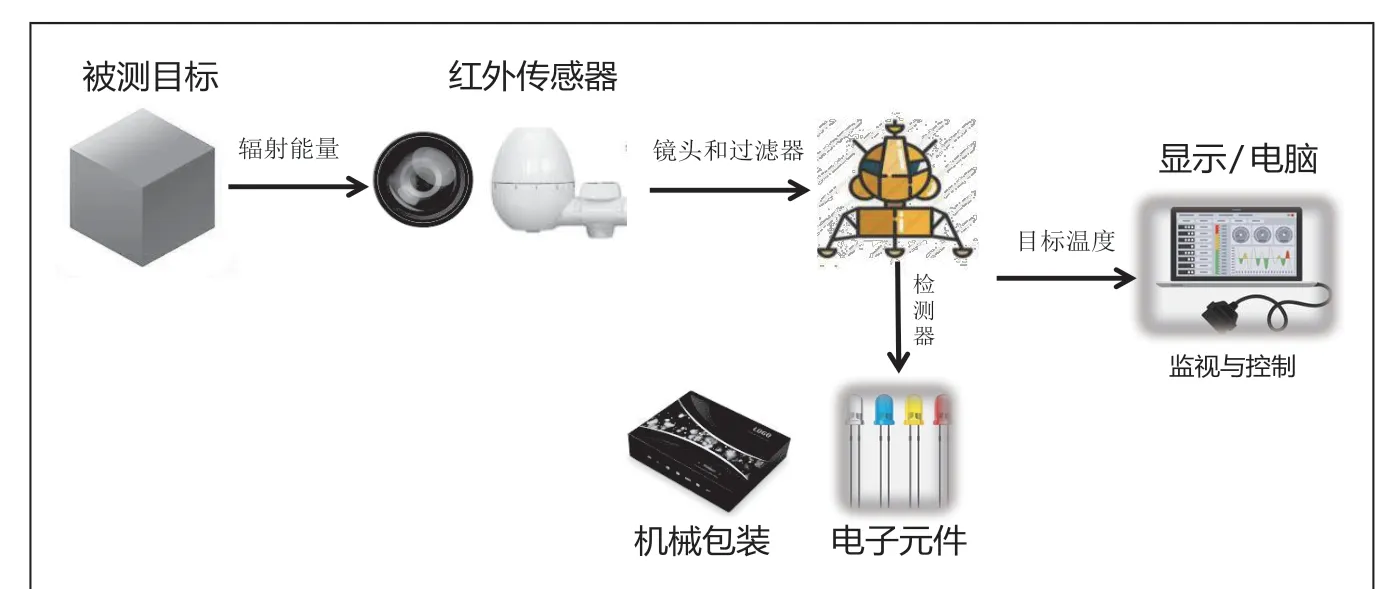
图3 红外测温原理图
■2.2 行驶与避让功能模块
超声波检测技术具有能量指向性强、能量消耗慢、能量在化学介质中传播时间长等优点,而且超声波能量检测技术往往比较快速、方便、计算简单。易于控制实时定位,因此有必要使用航空超声技术对卫星导航进行实时定位。超声波定时发射器同时向每个用户身体的两个方向发射超声波。同时,系统启动自动计时。当遇到特定障碍物时,它会自动返回并暂时停止启动计时。传感器通过接收检测到超声返回来的信号后即可计算出从障碍物到移动机器人的运动距离,测距结束后传感器驱动电机使机器人完成避让任务。
运动部件采用四轮双驱动,并可实现自动寻路以及主控寻路的功能。对于特殊病人,该机器人可以采用主动遥控的方式,通过前置的摄像头,操控人员可以非常方便的遥控机器人与病人进行交互。对于一般的医疗需求,其可以设置自动模式,通过超声波雷达装置自动寻路,运放可选用NE5532,也可以直接选用CX20106。
■2.3 自动回充模块
供电储能电池部件主要采用储能锂离子燃料电池,其产品拥有非常低的电池、自放电率低的可维护性和相对短的电池充电持续时间,具有极为优良的低温操作性能,现已经被广泛采用。机器人开关采用直流开关电源进行供电,开关电源一般由控制脉冲频率宽度信号调制、电路控制和控制开关电源构成。产品具有体积小、重量轻、效率高等三大特点。Tdk-lambda的系列cdcus-m产品在冷却条件下具有30W至350W的输出功率和电压等级,输出能量电压等级规格为5V至48V,输出功率高,密度低,效率高,符合现代医疗卫生设备应用要求的标准。
3 系统软件实现
机器人开始工作后,不断通过红外测温模块测量周围用户体温,当发现体温异常用户时,发出语音提醒。同时,会对电量进行判定,当机器人判断电量不足时,会发送回充信号并控制运动部件返回充电桩进行充电。具体功能实现如图4所示。

图4 软件实现原理图
■3.1 红外感应测温设计
红外加热辐射温度测温主要依据就是红外加热辐射温度原理—红外辐射温度定理:利用这个辐射原理设计制成的红外温度辐射测量专用仪表,也叫红外辐射温度仪表。红外线测温仪测得的红外辐射为:物体从外表面发射红外线,温度传感器接收这些红外线从而获得物体温度值数据,由服务器传送给云端,获得温度指标。若温度正常(低于37.3℃),则循环该过程;若体温异常,数据反馈至单片机调动播报器进行播报,完成警报任务。
■3.2 行驶与避让功能实现
在超声波定时发射器向每个用户身体的两个方向发射超声波的时刻,系统启动自动计时。当遇到特定障碍物时,它会自动返回并暂时停止启动计时。传感器通过接收检测到超声返回来的信号后即可计算出从障碍物到移动机器人的运动距离,测距离的公式定义为:l=c×t,其中:l为超声所计算测得的距离,c为室内超声波在潮湿空气环境中的持续传播运动速度,t为超声计时器所计算测得的持续时间。
■3.3 语音识别与交流
通过室内信息数据与云端数据,其可代替医生进入隔离区问诊,识别用户需求并进行语音回复,同时用户还可选择对讲模式与医生交流。
识别功能的实现是将框架识别为一种状态,状态组合成音素,音素组合成词,通过 “声学模型” 中的参数得到框架和状态对应的概率。同时,借助UCloud快杰云服务器构建一个状态网络,从状态网络中寻找最佳匹配路径。构建状态语音网络,直接将一个词的词级语音网络扩展为音素词级网络,然后直接扩展为状态语音网络。语音状态识别这个过程其实就是手机在一个状态识别网络中自动搜索一条最佳识别路径,语音识别对应这条最佳路径的频率概卒最大,这就被称之为“解码”。路经剪枝搜索的常用算法路经是一种用于动态快速规划路径剪枝的搜索算法,称之为Erviterbit的算法,用于快速寻找一个全局最优化的路径。
在机器人通信方式方面我们采用A类网络协议标准。类型A这种类型的网络是用于系统传感器/系统执行器数据控制的低速通信网络。发送到传输地址的数据的速率通常远小于l0kbit/s。这类低速网络也有多种通信协议,目前,用户首选的通信标准协议是Lin。Linrt是一种新型的低功耗总线串行数字通信数据系统,用于制造汽车分布式总线电子控制通信系统。它主要是基于Lruart (universal异步接收器/发送器) 的串行数据通信格式,是基于主从总线结构的单线12V电子控制总线串行通信数据系统。主要技术用于实现智能手机传感器和智能执行器的模拟串行数据通信。
使用医疗单位WiFi及局域网系统,医护人员与病患可以通过机器人屏幕进行实时交流,家属也可以采用线上方式主动接入网络,与患者交流,照顾患者。对讲机不受网络限制不依靠第三方设备,对讲模式的实现让机器人在特殊情况下的通信更加可靠。为减小恶劣环境对通信系统的影响我们采用了数字通信系统让其具有更强的抗干扰能力,能够更快的传回病患此时的状态及各项身体指标参数。
■3.4 云服务器搭建
UCloud快杰云服务器功能全面,采用AMD第二代EPYC处理器,主频高达2.9GHz并支持多达37种配置规格,比SATA-SSD更低的延迟可以使机器人更好地完成回避功能。
4 结语
本设计将医疗服务机器人模块化,既方便机器人的组装与日常维护,也方便日后机器人的组件升级更新。该医疗机器人协助医疗工作者共同救治病患,既可日常跟踪监护,又可及时反馈紧急情况,缩短救治反应时间。由于采用模块化设计,与集成设计相比,具有更大的开发空间和维护效率,节省了资金。
猜你喜欢
环球时报(2022-05-23)2022-05-23
科学导报(2022年24期)2022-05-19
中国典型病例大全(2022年7期)2022-04-22
航天返回与遥感(2022年1期)2022-03-09
金桥(2021年4期)2021-05-21
环球时报(2020-05-22)2020-05-22
华人时刊(2020年23期)2020-04-13
小天使·六年级语数英综合(2018年10期)2018-10-15
军事文摘·科学少年(2016年7期)2016-09-20
哈尔滨理工大学学报(2016年1期)2016-05-31
