考虑外界影响的元动作单元故障概率模型
2021-09-14 23:47鞠萍华谷豪东许文林黄广全
湖南大学学报·自然科学版 2021年10期
关键词:可靠性
鞠萍华 谷豪东 许文林 黄广全


摘 要:為描述数控机床运动构件的故障率随时间变化的情况,本文从元动作单元出发,建立了一个关于元动作单元的故障概率模型. 首先,根据元动作单元故障发生的原因将故障分成两类,随机故障和老化故障. 然后,根据这两种故障类型故障数据的不同特点,选用两个不同的概率分布函数分别进行描述,随机故障用泊松分布进行描述,老化故障用威布尔分布进行描述. 接着,给出这两种故障概率模型中各参数的物理意义和估计方法. 更进一步,工作负载和工作环境会分别对元动作单元的老化故障和随机故障的故障率造成影响.为比较这两者对故障率影响的大小,提出了工作负载参数Rl和工作环境参数Re,并给出这两个参数的估计方法. 最后,根据收集到的运动构件的故障数据作出频率直方图,同时,对故障数据进行参数估计得到概率密度函数,并将这两者画在同一幅图上,发现两者具有较好的拟合效果. 表明提出的元动作单元故障概率模型适合于描述运动构件故障率随时间的变化,模型有效.
关键词:元动作单元;随机故障;老化故障;外界影响;可靠性
中图分类号:TH17 文献标志码:A
Failure Probability Model Of Meta-action
Unit Considering External Influence
JU Pinghua GU Haodong,XU Wenlin,HUANG Guangquan
(School of Mechanical Engineering,Chongqing University,Chongqing,400044,China)
Abstract:In order to describe the change of the failure rate of computerized numerical control(CNC) machine tool motion components with time,this paper starts from the meta-action unit and proposes a new meta-action unit failure probability model. First,according to the cause of the meta-action unit failure,the failure types are divided into two categories:random failure and aging failure. Then,according to the different characteristics of the failure data of these two failure types,two different probability distribution functions are used to describe separately,where random failures are described by Poisson distribution,and aging failures are described by Weibull distribution. Next,the physical meaning and estimation method of each parameter in this failure probability model are given. Furthermore,the working load and working environment respectively affect the failure rate of the aging failure and random failure of the meta-action unit. In order to compare the magnitude of their influence on the failure rate,the working load parameter Rl and the working environment parameter Re are proposed,and the estimation method of the two parameters is also given. Finally,according to the collected failure data of the moving components,a frequency distribution histogram is made. At the same time,the probability density function is obtained by parameter estimation of the failure data,and these two are drawn on the same graph. It is found that both have a better simulation effect. The simulation effect shows that the proposed failure probability model of the meta-action unit is suitable for describing the change of the failure rate of moving components with time,and thus the model is effective.
Key words:meta-action unit;random failure;aging failure;influence of outside;reliability
对于数控机床而言,其功能是通过各个部件运动来实现的,而部件的运动则是由一个个基本动作完成的. 元动作单元结构化分解就是根据这一特点,将产品按照“功能(function)-运动(motion)-动作(action),FMA”进行分解,其中心思想就是将实现产品功能的复杂的综合运动拆分为一系列基本的动作. 将分解得到的最基本的动作称为元动作,将实现元动作的单元称为元动作单元(Meta-action unit,MAU). 一直以来,关于数控机床可靠性的研究比较多,但元动作单元可靠性的研究则比较缺失. 元动作单元作为组成数控机床的基本构件,研究其故障概率模型将对数控机床组成构件的可靠性研究有着重要作用.
为得到元动作单元故障概率模型,首先需要对元动作单元产生的故障进行分类. 在本文研究之前,对元动作单元故障进行分类的方法有很多,这些方法分别根据不同的标准进行分类. 有根据元动作单元故障发生的位置,将元动作单元的故障分为内部故障、连接型故障和控制系统故障[1];还有按照故障发生和发展的进程将故障分为突发性故障和渐发性故障;除此之外,还有根据观察到的故障现象将故障分为动态异常和静态异常两种类型[2]. 这些分类方式可以由故障结果直接进行判定,分类比较方便,但不利于得到元动作单元的故障概率模型.
除此之外,对各种机电设备进行分类并得到故障概率模型的研究也有很多,这些概率模型分别使用了不同的分布. 其中最简单和常用的是选用泊松分布对故障数据进行描述[3-4],使用泊松分布描述设备故障是最简单直接的. 但泊松分布展现的故障率是恒定的,而机电设备则会由于老化导致故障率不断增加,因此单纯使用泊松分布不能对故障数据进行描述. Xie等[5]提出用指数分布函数对故障率进行描述. 然而,这种方法却将老化故障当作随机故障,无法解释老化故障的故障率随时间增加的趋势. Li[6]提出了使用正态分布和威布尔分布. 这种方法可以得到故障率分布,但是这种方法却有一个缺点,其认为随机故障的故障率随时间改变.
上述故障概率模型在描述元动作单元故障数据时存在各种各样的缺陷,本文针对元动作单元的特点,建立元动作单元的故障概率模型.
1 元动作单元
元动作是数控机床进行FMA结构化分解中得到的最基本的动作,其具体的分解步骤如图1所示. 根据元动作的特点,在此将元动作的概念定义为:元动作为机电产品中传递运动和动力的最基本形式,它是机械产品中最小的运动[7].
单个零件是无法完成一个规定的元动作,需要一个完整的单元才能实现. 元动作单元为能够保证机械产品的元动作得以正常运行的所有零件按照装配关系组成的统一整体,且元动作单元在结构上不可再分也无需再分[7].
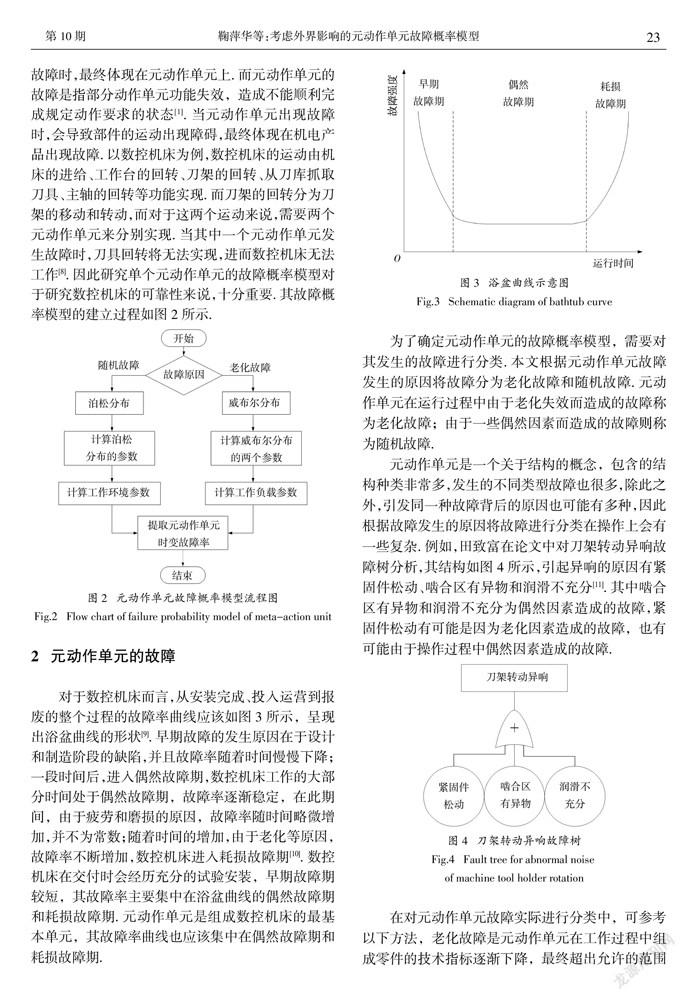
复杂的机电产品的功能是由部件的运动来实现,部件的运动是由一系列元动作来实现,而完成一个元动作则需要一个元动作单元. 因此当产品发生故障时,最终体现在元动作单元上. 而元动作单元的故障是指部分动作单元功能失效,造成不能顺利完成规定动作要求的状态[1]. 当元动作单元出现故障时,会导致部件的运动出现障碍,最终体现在机电产品出现故障. 以數控机床为例,数控机床的运动由机床的进给、工作台的回转、刀架的回转、从刀库抓取刀具、主轴的回转等功能实现. 而刀架的回转分为刀架的移动和转动,而对于这两个运动来说,需要两个元动作单元来分别实现. 当其中一个元动作单元发生故障时,刀具回转将无法实现,进而数控机床无法工作[8]. 因此研究单个元动作单元的故障概率模型对于研究数控机床的可靠性来说,十分重要. 其故障概率模型的建立过程如图2所示.
2 元动作单元的故障
对于数控机床而言,从安装完成、投入运营到报废的整个过程的故障率曲线应该如图3所示,呈现出浴盆曲线的形状[9]. 早期故障的发生原因在于设计和制造阶段的缺陷,并且故障率随着时间慢慢下降;一段时间后,进入偶然故障期,数控机床工作的大部分时间处于偶然故障期,故障率逐渐稳定,在此期间,由于疲劳和磨损的原因,故障率随时间略微增加,并不为常数;随着时间的增加,由于老化等原因,故障率不断增加,数控机床进入耗损故障期[10]. 数控机床在交付时会经历充分的试验安装,早期故障期较短,其故障率主要集中在浴盆曲线的偶然故障期和耗损故障期. 元动作单元是组成数控机床的最基本单元,其故障率曲线也应该集中在偶然故障期和耗损故障期.
为了确定元动作单元的故障概率模型,需要对其发生的故障进行分类. 本文根据元动作单元故障发生的原因将故障分为老化故障和随机故障. 元动作单元在运行过程中由于老化失效而造成的故障称为老化故障;由于一些偶然因素而造成的故障则称为随机故障.
元动作单元是一个关于结构的概念,包含的结构种类非常多,发生的不同类型故障也很多,除此之外,引发同一种故障背后的原因也可能有多种,因此根据故障发生的原因将故障进行分类在操作上会有一些复杂. 例如,田致富在论文中对刀架转动异响故障树分析,其结构如图4所示,引起异响的原因有紧固件松动、啮合区有异物和润滑不充分[11]. 其中啮合区有异物和润滑不充分为偶然因素造成的故障,紧固件松动有可能是因为老化因素造成的故障,也有可能由于操作过程中偶然因素造成的故障.
在对元动作单元故障实际进行分类中,可参考以下方法,老化故障是元动作单元在工作过程中组成零件的技术指标逐渐下降,最终超出允许的范围而发生故障,可以在事先发现征兆,具有可预测性;随机故障是元动作单元由于偶然因素突发的故障,一般没有任何征兆,具有不可预测性.
为对元动作单元发生的故障进行准确分类,从而确定元动作单元故障概率模型,故障数据的收集不仅要记录故障发生的时间,还要记录发生的部位和发生的具体情形,以便于确定引起故障原因,从而对元动作单元发生的故障进行分类.
3 建立元动作单元的故障概率模型
由于两种故障不同的数据分布特点,所以应选择两个不同的概率分布函数来分别对其进行描述. 除此之外,两种故障类型分属于两个独立的部分,所以最后得到的用来拟合元动作单元故障概率模型应为两个不同故障概率分布直接相加.
当故障数据具有三个特点时,可以选用泊松分布来进行描述[12]:
①物体在某段时间内发生n次故障的概率与时间起点无关,仅与该段时间的长短有关.
②在两段相互不重叠的时间内,物体发生故障的次数n1和n2是相互独立的.
③在较短的时间内,物体发生两次或更多故障的概率很小.
元动作单元的随机故障是由元动作单元内外的偶然因素导致的,例如,带传动的带突然断裂,异物进入元动作单元内等. 这些因素随机发生,导致元动作单元发生故障,相互之间没有关联. 因此发生n次故障的概率与时间起点无关,仅与时间长度有关;且互不重叠的时间内,发生故障的次数相互独立;另外,元动作单元是针对机械产品的概念,除特殊情况外,机械产品的寿命较长,可靠性也较高,发生故障的概率较低. 综上所述,元动作单元随机故障数据的特点符合泊松分布的要求,故随机故障选用泊松分布进行描述. 泊松分布的故障率的计算如式(1)所示:
老化故障是由于元动作单元运行过程中老化失效而发生的故障,例如:齿轮磨损,紧固件老化松动等. 老化故障的故障率随时间的增长而逐渐增加,因此应采用当参数变化时,概率分布函数形状随之改变的威布尔分布函数.
当威布尔分布形状参数改变时故障率随时间变化的情况如图5所示. 当m = 1,则威布尔分布为指数分布,故障率为常数;当m < 1,则故障概率随时间减小;当m > 1,则故障率随时间增加[13]. 故当m > 1时,威布尔分布适合描述老化过程.
4 元动作单元故障模型参数估计
元动作单元故障概率模型由独立的两个分布组成,泊松分布和威布尔分布,两种分布属于不同的类型,进行参数估计时应将两个分布分别进行估计. 由泊松分布的性质可知,其故障率可以由式(6)计算:
常用的威布尔分布参数估计方法有三种,极大似然估计、最小二乘法、矩估计法[14]. 三种参数估计方法中,矩估计法和极大似然估计法精度高于最小二乘法[15],本文选用矩估计法进行参数估计.
5 元动作单元工作负载参数和工作环境参数的估计
元动作单元在工作过程中,其故障率势必会受到外界因素的影响. 本文中,故障类型被分为两类,老化故障和随机故障. 在外界影响因素中,工作负载和工作环境会对两种故障类型的故障率分别造成影响. 为比较各个工作地区的工作负载和工作环境对元动作单元故障率的影响,本文分别采用工作负载参数和工作环境参数.
元动作单元工作过程中,工作负载越大,则老化速度就越快,所以应在威布尔分布中添加工作负载参数. 而工作环境会对随机故障的故障率造成影响,应对泊松分布添加工作环境参数[17].
当平均负载不断增大时,设备老化的速度不断加快,比例参数η往往与工作负载的大小有关,负载越大,比例参数越小[12],因此工作負载参数Rl应表现在威布尔分布的比例参数上;由于工作环境会直接影响随机故障的故障率,且泊松分布只有故障率λ一个参数,所以工作环境参数Re应直接表现在泊松分布的故障率上.
工作负载参数Rl和工作环境参数Re的估计方法和步骤如图6所示. 当工作负载参数Rl大于1,则说明对该元动作单元来说工作负载小于平均水平,如果小于1则说明工作负载大于平均水平;且工作负载参数越大,则说明工作负载越小;反之,参数越小,则说明工作负载越大.
工作环境参数Re则相反,如果大于1,则说明工作环境比平均水平更恶劣,如果小于1,则说明工作环境比平均水平更优;除此之外,工作环境参数越大,则说明工作环境更差,反之,则说明工作环境更好.
6 算例分析
某批次数控机床CJK1630共计116台平均分成四组,交付用户使用便开始进行现场试验,选取其中重要的转动元动作单元(主轴轴系结构),待所有机床的该元动作单元都出现故障,则数据收集结束,主轴的故障类型如图7所示.
7 结 论
1)本文提出了一种由威布尔分布和泊松分布组成的元动作单元故障概率模型,并考虑了工作负载和工作环境对元动作单元故障率的影响,最终发现元动作单元的故障率随时间变化的形式类似于失去早期阶段的浴盆曲线.
2)元动作单元是数控机床完成一个动作的最基本单元,其故障概率模型不仅可以对复杂机电设备的重要运动构件的可靠性分析提供帮助,还可以为运动构件维修保养计划的制定提供依据.
3)本文提出的元动作单元故障率模型对故障数据的处理简单,经算例分析验证有效,并且上述的模型不仅局限于元动作单元,在可靠性领域中,故障来源可以分为老化故障和随机故障的结构或系统均可以使用.
参考文献
[1] 姚梦生.数控机床典型元动作单元可靠性分析技术研究[D] .重庆:重庆大学,2018:17—21.
YAO M S. Research on reliability analysis technology of typical meta-action units of CNC machine tools[D]. Chongqing:Chongqing University,2018:17—21. (In Chinese)
[2] 曹沛龙.基于信息传递的数控车床机械故障根源追踪[D]. 长春:吉林大学,2020:9—18.
CAO P L. Mechanical fault root cause tracing of CNC lathe based on information transmission [D]. Changchun:Jilin University,2020:9—18. (In Chinese)
[3] 高鹏.输电系统中的一个泊松点过程模型及其可靠性研究[D]. 北京:华北电力大学,2016:1—15.
GAO P. Research on the poisson point process model of transmission system and its reliability[D]. Beijing:North China Electric Power University,2016:1—15. (In Chinese)
[4] 王乐,杨帅,朱时阳,等. 基于泊松分布的输电线路跳闸概率预测方法[J]. 高电压技术,2017,43(11 ):3777—3783.
WANG L,YANG S,ZHU S Y,et al. Prediction method of transmission line trip probability based on poisson distribution[J]. High Voltage Engineering,2017,43(11):3777—3783. (In Chinese)
[5] XIE M,GOH T N,TANG Y. On changing points of mean residual life and failure rate function for some generalized Weibull distributions[J]. Reliability Engineering & System Safety,2004,84(3):293—299.
[6] LI W Y. Evaluating mean life of power system equipment with limited end-of-life failure data[J]. IEEE Transactions on Power Systems,2004,19(1):236—242.
[7] 李宇龍,张根保,王勇勤,等. 数控机床基于元动作的FMEA分析技术研究[J]. 湖南大学学报(自然科学版),2019,46(10):64—75.
LI Y L,ZHANG G B,WANG Y Q,et al. Research on FMEA analysis technology based on meta-action for numerical control machine tool[J]. Journal of Hunan University(Natural Sciences),2019,46(10):64—75. (In Chinese)
[8] 张根保,王新,冉琰,等. 复杂机电产品基于元动作分解的可靠性建模及故障诊断[J]. 重庆大学学报,2017,40(8):9—18.
ZHANG G B,WANG X,RAN Y,et al. Reliability modeling and fault diagnosing method of complex electromechanical products based on meta-action decomposition[J]. Journal of Chongqing University,2017,40(8):9—18. (In Chinese)
[9] PULCINI G. Modeling the failure data of a repairable equipment with bathtub type failure intensity[J]. Reliability Engineering & System Safety,2001,71(2):209—218.
[10] JUN L,BINQUAN L G,CHENG L,et al. Calculation methods for the gas pipeline failure rate[J]. Journal of Petroleum Science and Engineering,2019,174:229—234.
[11] 田致富. 基于贝叶斯网络的刀架系统故障预测[D]. 长春:吉林大学,2020:15—17.
TIAN Z F. Turret system fault prediction based on bayesian network [D] Changchun:Jilin University,2020:15—17. (In Chinese)
[12] 赵宇,杨军,马小兵. 可靠性数据分析教程[M]. 北京:北京航空航天大学出版社,2009:35—40.
ZHAO Y,YANG J,MA X B. Reliability data analysis tutorial[M]. Beijing:Beijing University of Aeronautics & Astronautics Press,2009:35—40.
[13] 赛义德. 可靠性工程[M]. 北京:电子工业出版社,2013:43—48.
ELSAYED A. Relibity engineering[M]. Beijing:Publishing House of Electronics Industry,2013:43—48.
[14] 曾国桓.两参数威布尔分布下定时截尾试验的参数评估方法研究[D]. 成都:电子科技大学,2018:12—15.
ZENG G H. Methods of parameter estimation of two-parameter Weibull distribution for type-I censoring test[D].Chengdu:University of Electronic Science and Technology of China,2018:12—15. (In Chinese)
[15] DATSIOU K C,OVEREND M. Weibull parameter estimation and goodness-of-fit for glass strength data[J]. Structural Safety,2018,73:29—41.
[16] YANG Z J,HE J L,WANG J,et al. Bayesian method to solve the early failure period of numerical control machine tool[J]. Proceedings of the Institution of Mechanical Engineers,Part B:Journal of Engineering Manufacture,2016,32(9):1677—1686.
[17] 李新立,姜水清,劉宾. 热刀式压紧释放装置释放可靠性验证试验及评估方法[J]. 航天器工程,2012,21(2):123—126.
LI X L,JIANG S Q,LIU B. Release reliability validation tests and evaluation methods for the hold-down and release mechanism using thermal knife[J]. Spacecraft Engineering,2012,21(2):123—126.(In Chinese)
[18] 任丽娜,芮执元,李建华. 故障强度为边界浴盆形状的数控机床可靠性分析[J]. 机械工程学报,2014,50(16):13—20.
REN L N,RUI Z Y,LI J H. Reliability analysis of numerical control machine tools with bounded and bathtub shaped failure intensity[J]. Journal of Mechanical Engineering,2014,50(16):13—20. (In Chinese)
猜你喜欢
上海质量(2019年8期)2019-11-16
电子制作(2018年23期)2018-12-26
北京航空航天大学学报(2017年6期)2017-11-23
电子制作(2017年2期)2017-05-17
电子制作(2017年2期)2017-05-17
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
铁道通信信号(2016年10期)2016-06-01
通信电源技术(2016年5期)2016-03-22
电测与仪表(2015年6期)2015-04-09
制造技术与机床(2015年10期)2015-04-09