
汽车座椅功能性试验台架的研制
2021-09-10 21:52徐毅史定洪卢嘉陈吉清
科教创新与实践 2021年17期
关键词:汽车座椅
徐毅 史定洪 卢嘉 陈吉清




摘要:汽车座椅功能性试验是汽车座椅研发过程中的重要环节之一。通过对国内外行业以及企业标准的研究,研制出一套可基本覆盖汽车座椅调节功能、扶手功能、骨架间隙以及静态刚性试验的台架。该台架采用研华PCI-1716数据采集卡和PCI-1240U运动控制卡作为主控单元,伺服电缸作为执行单元,可选择力控制与位移控制两种模式;机械结构上设计了可多自由度调节的电缸固定立柱,具有占地空间小、可灵活调节加载方式的特点。该设备优秀的人机交互、可编程能力以及通用性得到了国内汽车座椅厂商的一致认可。
关键词: 汽车座椅;座椅调节机构;功能性试验;MATLAB控制
1引言
随着中国汽车产业的不断发展,人们对汽车座椅的关注度也逐年升高,其中汽车座椅调节功能和舒适功能部件的可靠性问题尤为重要,所以国内外汽车座椅厂商对汽车座椅功能性试验的需求也将随之增长 [1]。
国内行业标准QC/T 740中涉及的汽车座椅调节功能试验和舒适功能试验规范了座椅滑轨、调角器、高调、头枕、扶手和腰托等功能部件的性能试验,这些试验在试验方法上存在诸多差异,而国内大多数试验室均没有通用性较高的试验台架,导致试验效率较低。再加上相较于行业标准,国内外整车厂的企业标准中不仅对试验方法的要求更高,而且还对试验设备也有一定要求,针对此类试验,国内试验室之前采用手持式测力机进行试验的方式便无法满足车企要求。若采购进口设备,价格昂贵且二次开发能力差,给国内中小型企业带了极大的负担[2]。
整个座椅功能性试验台架难点在于要尽可能覆盖主流车企标准中的各类座椅功能性试验要求,同时还需要自行开发控制软件,实现力和位移两种模式的全闭环控制。
2控制系统软件设计
2.1控制系统软件设计目标
软件开发目的是实现对静态加载装置的测量与控制,不仅要将试验采集的数据显示和记录下来,而且还需完成试验装置的控制。具体目标如下:
(1)能够监测试验过程的测量数据,并能以图形的方式显示;
(2)能夠保存和读取试验数据;
(3)能够设置传感器和电机参数;
(4)能够对试验过程进行控制;
(5)能够对静态加载装置进行安全检测。
2.2软件模块划分
根据软件设计目标,开发的测控软件必须满足测量和控制两方面的要求。由于考虑到MATLAB/Simulink在控制方面的优势,本软件采用MATLAB/Simulink来实现主要的测控功能;但同时,也考虑到MATLAB/Simulink开发的应用程序用户界面的缺陷,决定采用LabVIEW来实现用户界面。如果在同一台计算机上同时运行两个部分,势必占用大量的计算机资源,为此,决定本软件采用上、下位机的方式来实现。上位机运行LabVIEW程序,完成与用户交互,不涉及试验机的硬件操作,通过通讯的方式,与下位机相互传送信息。下位机运行MATLAB/Simulink程序,直接与加载机硬件打交道,包括传感器信号,执行器的控制信号等,实现整个试验过程的测控功能[3]。如图1所示:
2.2.1 上位机模块划分
对于上位机来说,虽然没有直接操作硬件,但所有对硬件的操作命令都是通过上位机传递到下位机的,因此,在设计上位机的时候,要考虑到所有需要传输给下位机的信息,以此为原则划分模块。
2.2.1.1 控制模块
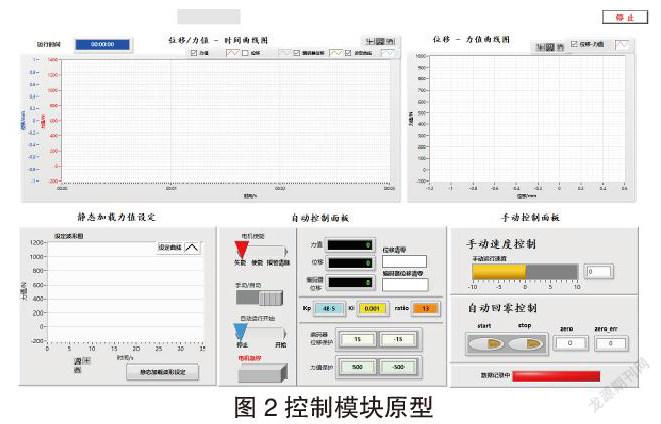
控制模块提供手动和自动两种方式;完成试验控制过程参数的监测。具体包括:(1)时间历程曲线的显示;(2)手动控制模式的操纵;(3)自动控制模式的操纵;(4)力值和编码器的上下限值。具体的软件原型如图2所示。
2.2.1.2 测量模块
测量模块能够完成试验数据的记录保存,并且能够查询和再现历史试验数据,模块原型如图3所示。
2.2.1.3 传感器及电机参数模块
该模块实现传感器和电机参数的设置,其软件原型如图4所示:
2.2.2 下位机模块划分
下位机直接与硬件打交道,硬件采用PCI1240P板卡,因此根据功能来划分模块。
2.2.2.1 数据获取模块
数据获取模块直接操纵硬件,编码器的信号为数字信号,经PCI-1240U运动控制卡数字通道获取;其他模拟信号经PCI-1716数据采集卡A/D转换后获得。上述获得的信号要经过校正和限制上下限。
2.2.2.2 控制模块
控制模块是加载装置的核心,采用力值反馈控制。控制方法采用PI调节控制。单独的P(比例)就是将差值进行成比例的运算,它的显著特点就是有差调节,有差的意义就是调节过程结束后,被调量不可能与设定值准确相等,它们之间一定有残差,残差具体值可以通过比例关系计算出。增加比例将会有效减小残差并增加系统响应,但容易导致系统激烈震荡甚至不稳定;单独的I(积分)就是使调节器的输出信号的变化速度与差值信号成正比,如果差值大,则积分环节的变化速度大,这个环节的正比常数的比例倒数在伺服系统里通常叫它为积分时间常数,积分时间常数越小意味着系统的变化速度越快,所以同样如果增大积分速度(也就是减小积分时间常数)将会降低控制系统的稳定程度,直到最后出现发散的震荡过程。这个环节最大的好处就是被调量最后是没有残差的。对力值采用PI调节控制就是综合P和I的优点,利用P调节快速抵消干扰的影响,同时利用I调节消除残差,确保控制精准度和系统稳定性[4]。
2.2.2.3 数据传送模块
数据传送模块完成向上位机传输测量数据的功能,采用UDP协议进行传输。
2.3软件的实现
上位机采用LabVIEW实现,下位机采用MATLAB/Simulink来实现。上位机实现时,将软件原型作为前面板,只要在程序框图中按照正确的逻辑将数据流连接即可。下位机实现时,在Simulink中搭建模型即可。应用模糊逻辑工具箱建立了电缸载荷模糊控制系统模型,包括变量的选取、模糊子集的定义、论域等级的划分、隶属度函数的选择、模糊控制规则的制订及量化因子和比例因子的选定。模型中涉及的变量及其取值如图5所示。
3 试验台架机械结构设计
本课题旨在设计一套通用性强的试验台架,即要求在使用同一个控制器的条件下,机械机构能够尽可能地应用到更多试验场景中,主要包含座椅滑轨、调角器、高调、头枕、扶手和腰托等功能部件的性能试验,所以要求在机械结构上能够进行垂向调节和角度调节。同时由于受试验场地所限,所以要求机械机构尽可能少占用空间,并且拆装便捷,便于工作人员移动。如图6所示:
1.底座台架 2.可动台架 3.直线导轨连接 4.丝杠连接
整个机械机构主要由两部分构成:
(1)底座台架:下方打了一圈圆孔和一圈腰形孔以适配现有试验平台T型槽进行固定,另考虑到对于不同试验平台的通用性,下方还留有空间以满足用压板进行固定的这一方,两种固定方式均有利于试验人员进行快速拆装固定。
(2)可动台架:可动台架通过底座台架侧边直线导轨和丝杠连接在底座台架上,可实现垂向调节功能;台架上端中间装有一个固定支架,可用于安装前端绳索,这一机构可以进行角度调节。这两个自由度的调节是为了适应对不同座椅的不同部位的加载需要。
机械机构设计成立柱形式可以最大程度地减小加载装置与座椅之间的干涉,一般试验都是以移动样件的方式来满足试验的安装要求,但对于座椅功能性试验来说,往往是需要在同一样件上来完成多个试验项目,此时这一便于移动的立柱结构便能以样件为中心来调整位置以满足试验加载要求。
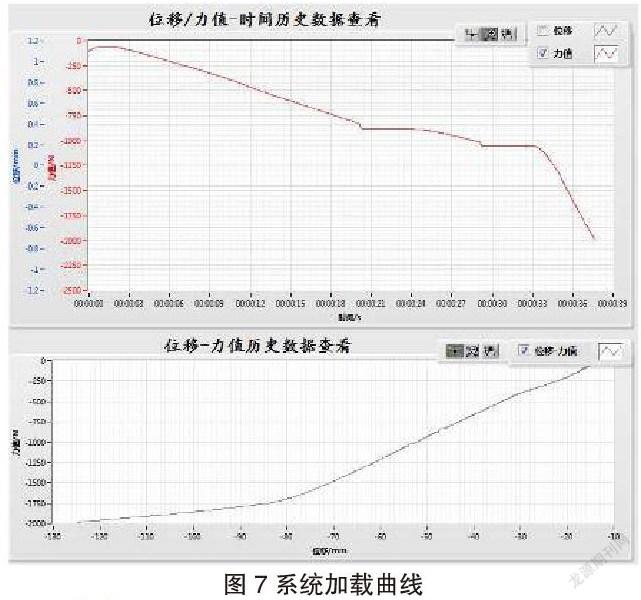
4 系統运行
以国内某款前排座椅的骨架为对象进行试验验证,按照QC/T 740以及国内某整车厂标准进行两种静态刚性试验,试验过程中测控系统及机械结构运行稳定,无任何异常。
5 结论
本课题设计了一套完整的座椅功能性试验台架系统。可在该系统上实现汽车座椅调节机构和舒适性部件的功能性试验;力控制与位移控制模式的切换使得试验台架系统在试验操作上具有灵活性,适用范围更加宽广;所设计了立柱式机械台架可以围绕试验对象自由进行加载位置调整;人机界面可以随时开始、暂停以及终止试验,并能监测各传感器及执行器的实时运行情况,使整个系统的人机交互能力水平大大提高。该系统已经为各大中小汽车座椅厂商完成研发耐久试验,得到了企业们的高度评价。
参考文献:
[1] 徐勇, 靳建龙, 牛宝忠, 傅春宏. 汽车座椅舒适性及评价方法分析[J]. 机械研究与应用,2018, (2):51~54.
[3] 全国汽车标准化技术委员会.QC/T 740-2005乘用车座椅总成[S].北京:中国计划出版社,2005.
[4] 张婷瑞, 李善姬, 丁景龙. 基于LabVIEW和MATLAB混合编程的实时自适应滤波系统[J].电子测试.2009,(1):40~43.
ZHANG Ting-Rui, LI Shan-Ji, DING Jing-Long. Design of LMS Adaptive Filter Based On LabVIEW And MATLAB[J]. Electronic Test,2009,(1):40~43.
[5] 韩超, 冯国胜. 基于MATLAB&LabVIEW的PMSM矢量控制系统建模与分析[J]. 农业装备与车辆工程, 2018, 056(010):9-12.
HAN Chao, FENG Guo-Sheng. Modeling And Analysis Of PMSM Vector Control System Based On MATLAB&LabVIEW[J]. Agricultural Equipment & Vehicle Engineering,2018, 056(010):9-12.
1.上海机动车检测认证技术研究中心有限公司 上海 201805
2.无锡职业技术学院 江苏 无锡 214121
猜你喜欢
汽车实用技术(2022年7期)2022-04-20
科技视界(2017年24期)2017-12-09
科学家(2017年8期)2017-06-22
科技与创新(2017年6期)2017-05-08
山东工业技术(2017年4期)2017-03-28
科学与财富(2017年3期)2017-03-15
科学启蒙(2016年7期)2016-08-06
科学启蒙(2016年6期)2016-07-01
科技视界(2016年2期)2016-03-30
