
基于BAS-PID算法的介电弹性体执行器控制研究
2021-09-07 03:10:50苏泽斌
西安工程大学学报 2021年4期
徐 健,惠 楠,苏泽斌
(西安工程大学 电子信息学院,陕西 西安 710048)
0 引 言
软体机器人在勘探、救援、医疗等领域有广阔的应用前景。DEA作为软体机器人,具有能量密度高[1]、变形大[2]等特点,并且可以完成移动、抓取等任务[3]。但DEA具有黏弹性的特点限制了在机器人领域的运动精度,为了实现对DEA的有效控制,可采用流变模型对DEA进行建模,从而模拟DEA的黏弹性效应[4]。对于DEA的控制分为前馈控制和反馈控制[5]。反馈控制相对于前馈控制具有更理想的控制精度,采用PID控制DEA具有较好的跟踪性能[6]。PID控制的难点在于其参数整定问题,不同参数的整定方法会对PID的性能产生巨大差异,常规的PID参数整定方法相对复杂,很难实现最优整定参数[7-8]。
针对传统PID控制的缺点,采用仿生智能算法优化PID参数是一种有效的方法。BAS算法是近年来提出的一种仿生优化算法,在不需要函数的具体形式情况下,就可以实现高效寻优[9]。BAS算法的生物原理是一种通过模拟天牛觅食时根据触角来接收的食物气味强弱,确定搜索方向,最终找到全局最优参数的一种新型智能优化算法[10]。该算法有2个优点:第一,不需要知道函数具体形式和梯度信息;第二,能够降低运算量,缩短寻优时间[11-12]。
针对介电弹性体构成的执行器在驱动过程中存在难以精准控制的缺点,提出采用BAS算法和PID结合的控制方法来实现对DEA的精确控制。为了给DEA后续的实际应用提供理论依据,建立了DEA的动力学模型,利用Matlab/SIMULINK对所建立的模型和控制算法进行了仿真研究,控制系统采用BAS算法,对PID进行参数优化,实现对DEA的有效控制。
1 DEA动力学模型
介电弹性体在外加电压作用下会发生形变,当给柔性电极加载电压,在电场的作用下介电弹性体表面会积累正负电荷,导致介电弹性体厚度变薄且平面方向上扩张变形;当柔性电极电压卸载,介电弹性体会恢复至原状,则介电弹性体实现从电能到机械能的转化[13]。DEA是由介电弹性体材料和柔性骨架组成的软体机器人。DEA在电能和机械能转化过程之中存在黏弹性效应[14]。因此,可采用流变模型中的弹簧阻尼器对DEA的黏弹性效应导致的非线性运动进行建模[15]。
DEA模型的动力学方程可表示为
(1)
式中:i=1,2,3,4;xi为弹簧变形;此模型中表示黏弹性的弹簧阻尼动力学由2个单元组成,弹簧k为一个单元,弹簧ki和阻尼器ci组成另一个单元;m为DEA的质量,此处取9 g;Φ为DEA的驱动电压;Ω(x)为DEA长度变化的线性函数;ζ为DEA运动过程中的阻力;当x′>0,sgn(x′)=1;当x′=0,sgn(x′)=0;当x′<0,sgn(x′)=-1,为了保证系统的稳定性,可以采用PID使DEA的误差收敛。
在DEA模型中,将式(1)中Φ2作为PID的输出,有
(2)
式中:i=1,2,3,4;x为DEA的输出;ζsgn(x′)/m为由摩擦力导致的扰动,并且有界可收敛。
2 BAS-PID控制算法
PID是一种基于过去、现在和未来信息估计的算法[16]。PID参数,即比例参数Kp、积分参数Ki和微分参数Kd[17]。比例参数Kp反映系统偏差,通过调节能够提高系统灵敏度及系统稳定性;积分参数Ki作用是消除系统稳态误差,改善系统无差度;微分参数Kd反映偏差信号变化规律,依据这些规律进行超前控制调节,改善系统能动性。BAS算法和传统PID算法相结合,使得控制系统可以利用BAS算法的参数优化能力来调整PID的参数。基于BAS算法的PID控制框架如图1所示。
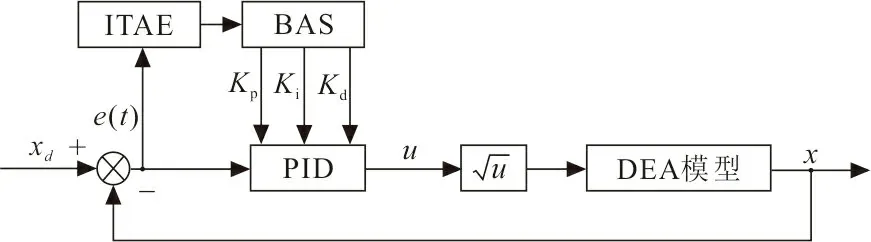
图 1 DEA控制系统Fig.1 DEA control system
图1中,ITAE为时间乘以绝对误差的积分,xd为期望位移,x为输出位移,u为PID的输出量,DEA的位移受到电压平方的影响,DEA的输入为电压信号Φ,而PID的输出量u为电压平方Φ2,所以将PID控制量的平方根作为DEA的输入。BAS算法可以通过基于误差的ITAE函数对PID参数进行优化,在迭代过程中,减小DEA产生的误差,从而提高DEA的驱动精度。
BAS算法是一种元启发式智能优化算法[18],天牛每次的运动轨迹就是一个优化解决方案。BAS算法的适应度函数选用ITAE作为指标[19-20],可表示为

(3)
式中:e(t)为系统产生的误差。PID参数整定可以转化为BAS算法的三维参数优化问题。在BAS算法迭代过程中,利用天牛的位置来更新PID参数。当PID控制系统的性能满足要求或搜索过程达到最大迭代次数时,以天牛的最佳位置作为最终的PID参数。BAS-PID控制器的参数整定步骤如下。
1) 初始化天牛位置和天牛须的朝向信息,天牛朝向信息可表示为
(4)
式中:D赋值为3,为优化参数的维数;rand()为[0,1]之间的一个随机数。
2) 天牛三维位置参数分别赋值给Kp、Ki和Kd,运行PID控制系统进行仿真。
3) 将PID控制系统产生的误差代入适应度函数G中计算当前适应度值。
4) 每次迭代产生的适应度值和对应的PID参数按照适应度从大到小进行存储更新。
5) 判断是否迭代到最大迭代次数T=80或适应度值G≤0.01,若未达到,则天牛触须三维参数分别赋值给Kp、Ki和Kd,运行控制系统进行仿真。计算触须适应度值,并且触须长度lt和步长δt以及左右触角位置pl、pr采用式(5)进行更新,并且天牛向适应度小的方向进行移动。
(5)
式中:lt为天牛在t时刻触须的长度参数;δt为天牛t时刻的步长参数;dt为天牛在t时刻触角之间的距离参数;pt为天牛在t时刻的位置参数;pr为天牛右触须的位置参数;pl为天牛左触须的位置参数。
6) 天牛位置参数采用式(6)更新,并且返回第2)步进行循环迭代。
pt+1=pt+∂tbsgn(G(pl)-G(pr))
(6)
式中:sgn函数用来返回步长参数的正负,当G(pl)大于G(pr)时,天牛向左移动,当G(pl)小于G(pr)时,天牛向右移动,当G(pl)等于G(pr)时,天牛保持原位置不动。
7) 当迭代次数T=80或适应度值G≤0.01,迭代结束。从存储的PID参数和适应度值中输出最优PID参数和对应的适应度值。BAS-PID工作流程如图2所示。
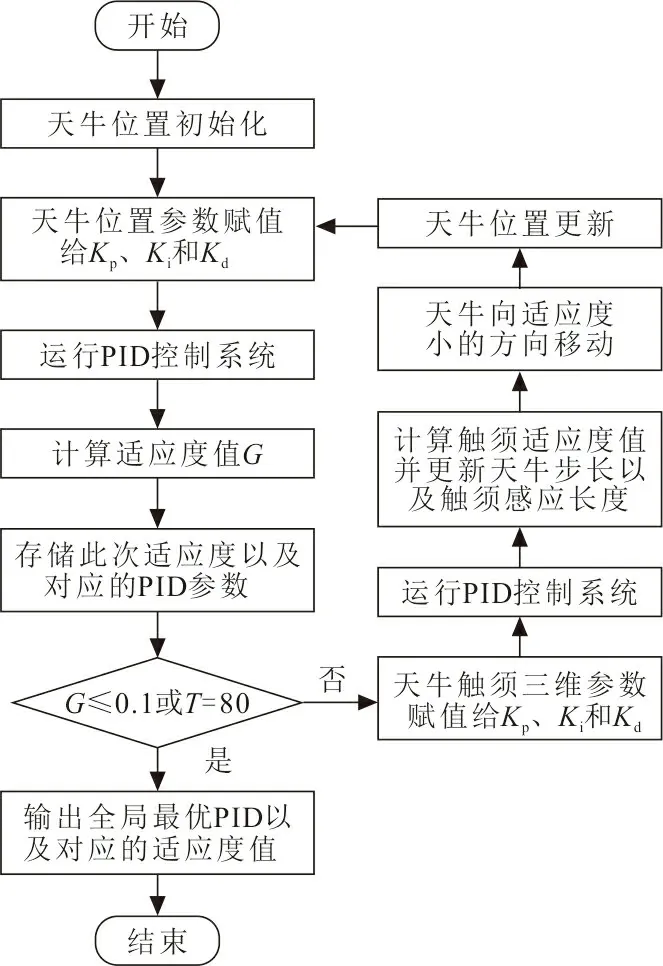
图 2 BAS-PID工作流程Fig.2 BAS-PID workflow
图2中,BAS-PID在迭代过程中采用多只天牛搜索、变步长和变触须长度增强全局搜索能力,同时避免陷入局部最优,由于天牛初始位置随机,所以通过设定天牛的位置边界的方式,提高BAS算法搜索最优PID参数的准确性。
3 仿 真
为了验证本文提出的BAS-PID控制方案的有效性,在Matlab/SIMULINK中搭建PID控制系统和DEA模型,并将BAS算法在M文件中实现。在BAS运行中调用PID的数据,对PID参数进行迭代优化。BAS算法参数:种群数量为10,初始步长δ0=5,最大迭代次数T=80,适应度函数最小精度G=0.01。在仿真实验中,BAS-PID在迭代过程中的适应度曲线如图3所示,BAS-PID、BP-PID和PID对不同参考信号的跟踪效果如图4所示。
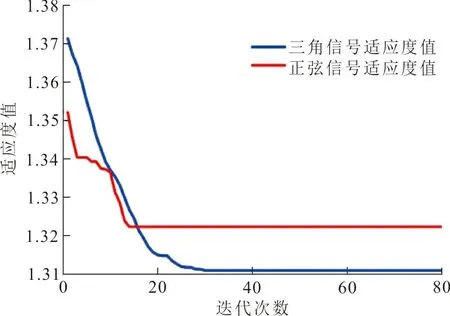
图 3 BAS-PID适应度值的迭代曲线Fig.3 Iterative curve of BAS-PID fitness value

(a) 不同控制算法正弦信号跟踪曲线
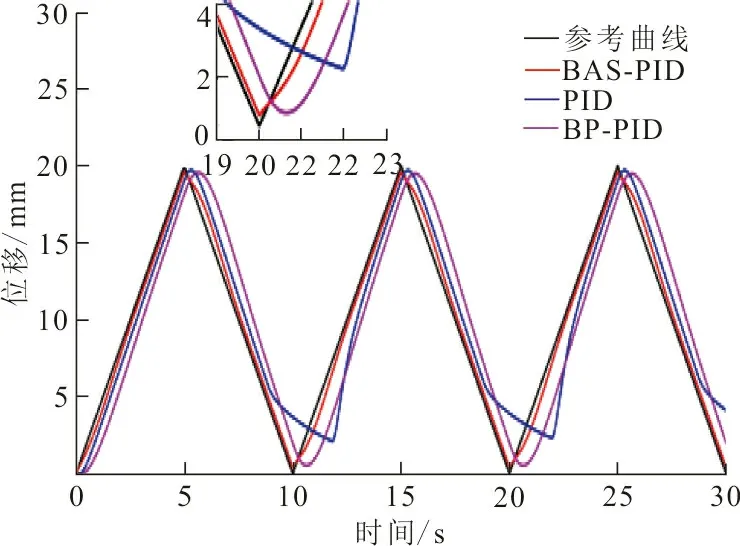
(b) 不同控制算法三角信号跟踪曲线图 4 不同控制算法跟踪曲线对比Fig.4 Curve tracking of different control algorithms
从图3可看出,当参考信号为正弦信号和三角信号情况下,BAS算法分别在的第14次和第30次迭代时,搜索到最优PID参数,最小的适应度值分别为1.32和1.31,由此可见,BAS-PID在收敛速度上取得较好结果,能够用较少的迭代次数达到最优值。从图4可看出,PID算法和BP-PID算法在不同波形的参考信号拐点处都存在较大误差,这主要是由于黏弹性效应导致控制器难以及时响应,所以PID算法和BP-PID算法在拐点处都存在明显滞后于参考曲线。BAS-PID算法在不同波形的参考曲线拐点处、上升和下降部分均可以进行有效跟踪,在控制过程中减少了DEA黏弹性影响,提高了DEA的控制精度。仿真结果说明:BAS-PID算法的调节能力相较于PID算法和BP-PID算法能够更准确跟踪DEA的参考信号,具有良好的控制性能。
为了量化3种控制算法的优劣,选取最大跟踪误差emax和均方根误差erms进行对比,最大跟踪误差emax和均方根误差erms采用式(7)进行计算,具体精度参数如表1所示。
(7)
式中:x为输出位移;xd为期望位移;N为采样的次数。
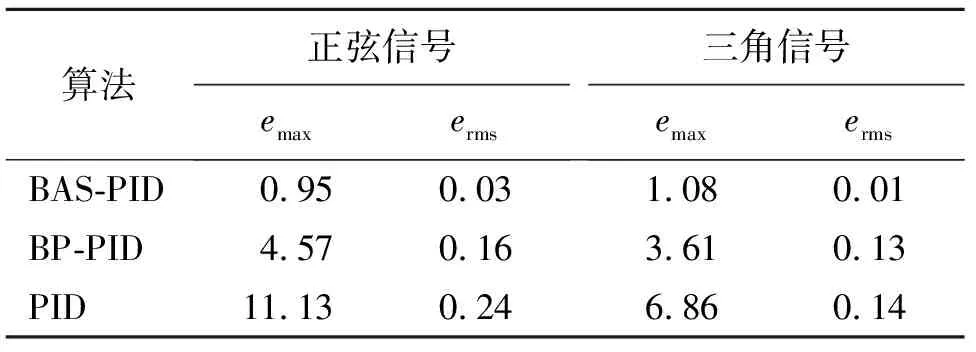
表1 不同控制算法精度参数
从表1可看出,在正弦输入信号下,BAS-PID比常规的PID最大跟踪误差降低10.08 mm,均方根误差降低0.21 mm,在三角输入信号下,BAS-PID比常规的PID最大跟踪误差降低5.78 mm,均方根误差降低0.13 mm。BP-PID的控制精度优于常规PID但仍有较大误差。文献[15]所提出的生物启发控制方法对于正弦信号的最大跟踪误差为0.97 mm,均方根误差为0.47 mm。BAS-PID的最大跟踪误差为0.95 mm,比生物启发控制方法的最大跟踪误差略有降低,均方根误差从0.47 mm降低至0.03 mm。
4 结 语
本文提出并使用BAS-PID算法完成了对介电弹性体执行器驱动控制方法的研究。首先,建立了介电弹性体执行器的模型并对其驱动过程中的黏弹性效应进行模拟验证;其次,详细介绍了BAS-PID算法,将BAS算法中天牛的三维信息引入PID参数中,在迭代优化过程中,使得衡量系统稳定性的ITAE适应度函数减小,解决DEA存在的黏弹性问题;最后,通过仿真对比实验验证了BAS-PID、BP-PID、PID控制算法的控制效果,其中BAS-PID算法产生的误差更小,说明本文的控制算法可以实现介电弹性体执行器的精确控制。
猜你喜欢
中学生数理化·七年级数学人教版(2023年3期)2023-03-21 00:44:56
小哥白尼(野生动物)(2021年1期)2021-07-16 08:02:52
弹性体(2021年6期)2021-02-14 05:39:00
小学生必读(低年级版)(2018年10期)2019-01-04 10:30:56
故事作文·低年级(2018年10期)2018-10-25 20:56:52
自动化学报(2017年2期)2017-04-04 05:14:28
材料科学与工程学报(2016年1期)2017-01-15 13:34:10
中学生数理化·七年级数学人教版(2016年2期)2016-05-30 21:20:57
橡胶工业(2015年3期)2015-07-29 08:24:16
作文与考试·小学低年级版(2015年11期)2015-07-17 01:02:16
