
自适应巡航控制系统制动噪声问题分析与优化
2021-09-02 09:04郑建明吴南洋李策金鉴张宇飞
汽车文摘 2021年9期
郑建明吴南洋李策金鉴张宇飞
(1.中国第一汽车股份有限公司研发总院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:制动噪声 自适应巡航 分析 优化 自动驾驶
缩略语
ACC Adaptive Cruise Control
ADAS Advanced Driver Assistance System
ESP Electronic Stability Program
HCU Hybrid Control Unit
IFC Intelligent Forward Camera
1 前言
随着智能网联汽车自动驾驶技术的不断成熟,L2级自动驾驶辅助系统(Advanced Driver Assistance System,ADAS)已在整车上大量装备。艾瑞研究院的调研报告指出,驾驶辅助功能在2020年新车装备率已达10%,2022年上升至20%,2024年达到40%。配备车型由海外旗舰车型逐渐渗透至国内品牌的中小型乘用车。随着自动驾驶技术的不断发展和成熟,将极大降低驾驶员劳动强度,提高驾驶舒适性和安全性;改善交通拥堵状况,提升通行效率;消费者的购车方式和出行方式将发生重大改变[1]。
制动噪声是汽车行驶过程中主要噪音之一,其直接影响用户的驾驶及乘坐体验。国内外学者对其从产生机理、解决方法展开了广泛的研究,并取得了显著成果,但现阶段研究人员研究的焦点仍集中在人工驾驶车辆过程所产生的制动噪声问题。由自动驾驶系统引发的制动噪声问题,尚未引起研究人员的关注。
本文针对某款SUV车型在使用自适应巡航控制系统(Adaptive Cruise Control,ACC)[2]过程中存在严重制动噪声问题进行分析,该制动噪声具有发生概率大、音质扰人的问题,降低了用户体验,容易引起用户抱怨。本文针对ACC系统工作状态下制动噪声问题进行深入探讨,研究制动噪声发生的机理及原因并提出优化方向。
2 自适应巡航状态下制动噪声
2.1 自适应巡航控制系统
自适应巡航控制系统是智能驾驶辅助系统的重要组成部分[3],其能够通过车辆感知传感器对车辆前方驾驶环境进行感知,识别前方目标运动状态,结合本车行驶数据对驾驶环境进行分析判断,系统自动控制车辆进行匀速、加速和制动操作,以安全的车距跟随目标车辆行驶[4]。从而减轻驾驶员的驾驶疲劳,提高驾驶舒适度和行驶安全性[5]。
2.2 制动噪声
制动噪声问题是一个涉及材料、结构和振动多学科的复杂系统问题,国内外学者对其从产生机理、解决方法开展了广泛的研究,并取得了显著成果[6]。
Rhee S K等通过研究摩擦副表面特征发现,在摩擦副表面不平整条件下,在高速摩擦时脉冲冲击容易激发制动盘与制动块的固有频率,从而引发摩擦噪声[7];Kinkaid N M等通过分析制动执行机构(制动盘和制动块)的模态耦合,发现制动器摩擦力与摩擦副的相对速度存在非线性变化关系,该特性会导致系统出现粘滑(Stick-Slip)现象,从而导致使系统失稳发出制动噪声[8];Spurr R T等对制动过程分析时发现制动器的几何或运动约束会导致系统自激振动,引发系统振动噪声[9];Abdelnaser A等通过对存在制动噪声的制动器进行研究发现,其制动盘和制动块的固有频率和振型十分相近,摩擦副表面节点发生强耦合,导致具备相近模态频率的摩擦部件之间产生共振,进而引发制动噪声[10]。
国内外工程师对制动噪声进行深入研究并形成了诸多制动噪声分析理论,如自锁滑动理论、模态耦合理论、摩擦特性理论、制动尖叫统一理论[11],但现阶段研究人员研究的焦点仍集中在制动卡钳与制动盘摩擦过程上。
2.3 自适应巡航状态下制动噪声
在使用ACC功能驾驶车辆时发现,在某些典型场景下车辆发出严重制动噪声,该制动噪声存在声音品质差、响度大、发生概率高的问题,严重影响用户的驾驶体验。由于ACC功能能够根据交通环境状况自动控制车辆加速、制动操作,所以当出现制动噪声问题时,不仅涉及到制动系统,同时也与ACC系统相关。
2.4 制动噪声场景及特点分析
针对该问题,通过驾驶场景库选取大量典型用户场景进行实车验证,并对产生制动噪声的场景进行分析总结,发现制动噪声主要集中在以下3种驾驶场景中,场景分类及描述见表1。
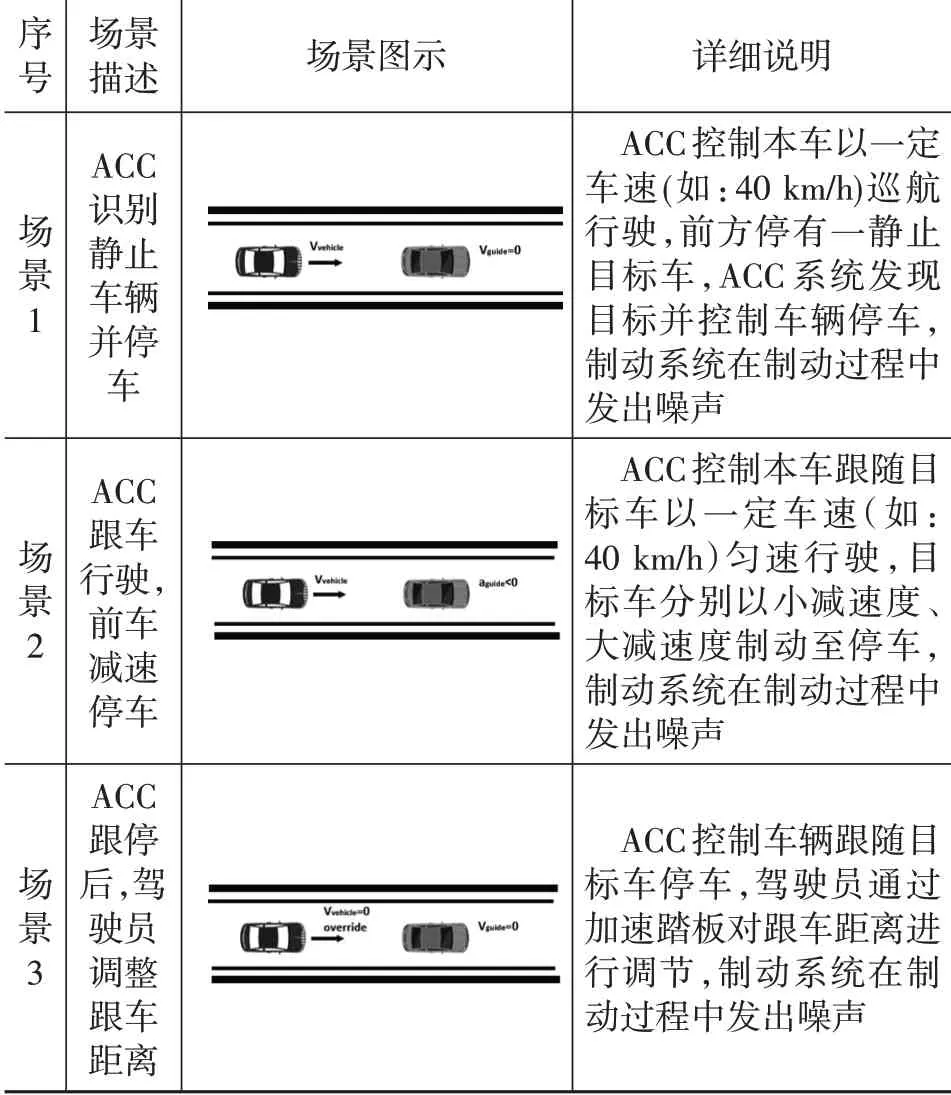
表1 制动噪声场景
通过对问题工况进行分析,发现制动噪声发生工况具有以下特点,如表2所示。
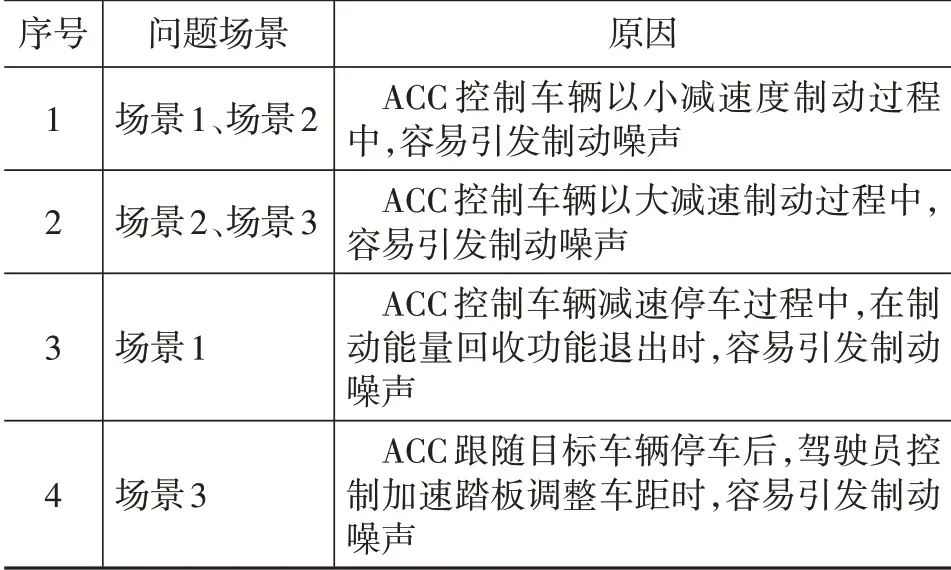
表2 制动噪声工况特点
3 制动噪声原因分析
3.1 结构原理分析
人工驾驶车辆的制动噪声问题通常是由制动卡钳和制动盘摩擦过程引发高频振动造成的,但是该车型在人工驾驶车辆过程中并未发现制动噪声问题,因此排除制动器因素。通过ACC功能控制车辆减速的原理及制动系统结构进行分析。
ACC控制车辆减速原理如下:ACC系统通过感知传感器对周围环境进行分析判断,当需要车辆减速时,系统向车身稳定控制系统控制单元(Electronic Stabili⁃ty Program,ESP)发出制动请求信号,通过ESP控制单元驱动制动系统中的电动液压泵旋转,带动偏心轮旋转,推动活塞产生制动液压,实现主动建立制动压力,推动制动器完成制动操作,从而实现了对车辆的减速控制[12]。EPS控制单元主要结构如图1所示。

图1 制动系统结构
通过分析噪声发生的工况发现,制动噪声均发生在ACC系统控制车辆减速过程中,尤其是本车减速度比较大、制动过程比较急的工况下。由于ACC状态下的制动动作是通过ESP控制单元中电动液压泵工作实现的,所以对电动液压泵工作转速进行数据监控。通过采集ESP系统电动液压泵转速发现,当电动液压泵转速超调或者大转速状态下,制动噪声同步产生。分析结果表明ESP控制单元中电动液压泵工作过程中的高频振动是产生制动噪声的直接原因。
3.2 特性要因分析
通过对制动噪声工况数据进行分析发现,电动液压泵产生噪声的原因主要有2点:
(1)当电动液压泵处于高转速状态时,容易产生制动噪声;(2)当电动液压泵转速突然升高,容易产生噪声。从硬件结构和软件控制2个方面对制动噪声产生的原因进行进一步分析。
从硬件结构方面来看,电动液压泵集成在ESP控制单元上,ESP控制单元通过支架固定在车身上,电动液压泵在旋转过程中产生高频振动,并将该高频振动通过支架传递给车身,从而导致驾驶舱内制动噪声明显。但是,由于液压单元内部集成加速度传感器,为保证加速度传感器精度,所以无法通过增加弹性垫片的方式,在振动传递路径中阻断振动传入车内[13-14]。
从软件控制方面来看,运用特性要因图[15]对相关控制器控制策略进行分析。与制动噪声相关的控制器主要有智能前视摄像头控制器(Intelligent Forward Camera,IFC)、车身稳定控制器(ESP)以及整车控制器(Hybrid Control Unit,HCU),通过对噪声发生场景及相关控制器控制逻辑进行分解,制动噪声原因分析见图2,制动噪声发生场景和产生原因对应情况见表3。

图2 制动噪声原因分析

表3 制动噪声发生场景及产生原因对应情况
4 对标分析
4.1 对标车分析
样车对标作为整车设计开发中的重要方法,可以在问题解决上提供方法和数据支撑[16-17]。针对制动噪声问题选取了2台对标车,对标车的自动驾驶辅助系统均处于行业领先。在功能实现原理上与问题车型一致,具备对标价值。对于解决制动噪声问题能够提供解决思路和数据支撑。
针对制动噪声问题,核心点在于制动过程的制动减速度请求控制。其中跟车时距控制与制动过程控制是影响制动减速度请求的重要因素,所以进行跟车时距控制策略对标和制动过程控制对标对解决制动噪声问题具有重要作用。
4.1.1 跟车时距控制策略对标
对对标车1进行跟车时距控制策略对标测试,并对其跟车时距策略进行分析。
(1)测试方法
使用ACC系统控制车辆跟随目标车稳定行驶,将跟车挡位分别设置为最小挡位、中间挡位和最大挡位,跟随车速分别设定为10 km/h、20 km/h、30 km/h、40 km/h、50 km/h,测量2车之间的跟车距离。
(2)数据分析
将测试数据整理如表4、图3所示。
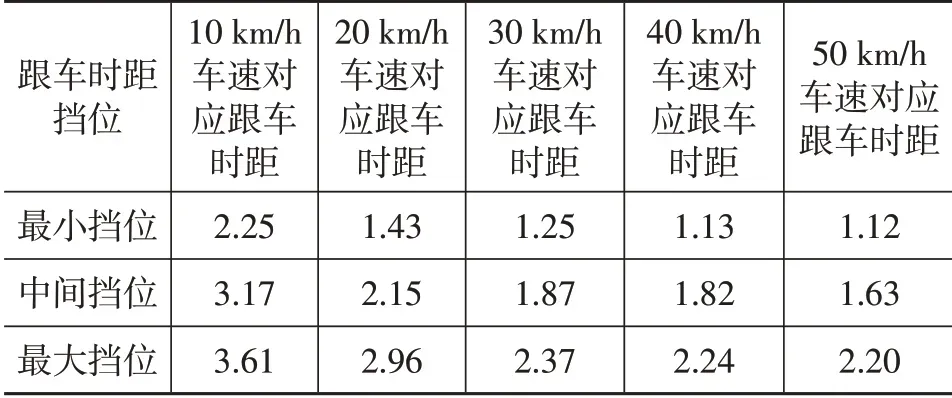
表4 对标车1跟车时距 s

图3 对标车1跟车时距
对试验结果分析可知:
(1)相同车速条件下,随着跟车时距挡位的增加,跟车时距值增加;
(2)在相同跟车时距挡位条件下,随车速的增加,跟车时距先变小后趋向于平稳;30 km/h以后,随着车速的增加,跟车时距趋于稳定。
由此可见,该对标车型1的ACC功能在低速跟车工况下,2车跟车时距较大,当前车进行制动减速时,由于2者在距离上相对较远,系统控制所需制动减速度和减速度梯度均比较小,制动过程平顺。可为ACC功能在跟车时距方面的优化提供思路。
4.1.2 制动减速度控制策略对标
对对标车1和对标车2进行制动过程控制对标测试和分析。鉴于在跟随目标停车过程试验车辆容易出现制动噪声,所以使用该工况作为制动过程控制对标工况。
(1)测试方法
使用ACC系统控制车辆跟随目标车以40 km/h的车速稳定行驶,将跟车挡位设置为中间挡位,目标车以4 m/s2的制动减速度制动至停车,测量试验车的车速和制动减速度。
(2)数据分析
制动时机方面:从图4车速对比曲线可知,对标车1开始制动时间最早,对标车2次之,某SUV制动时机最晚。
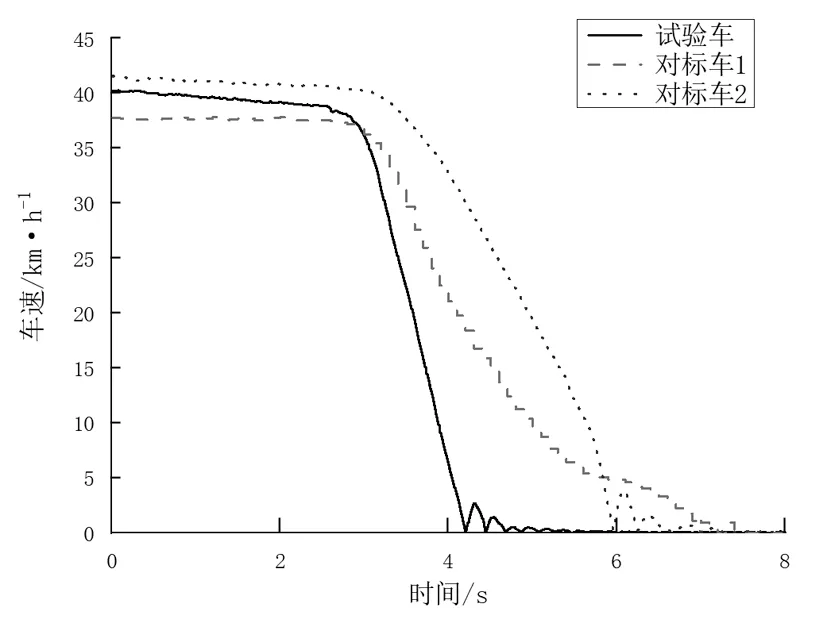
图4 车速曲线对比
制动减速度方面:从图5减速度对比曲线可知,对标车1在整个制动减速过程最为平顺,加速度无明显波动,最大制动减速度不超过-3 m/s2。对标车2次之,最大制动减速度最大不超过-7 m/s2,有1次明显波峰。某SUV制动减速度超过-9 m/s2,有2次明显波峰,制动噪声及制动冲击明显。

图5 减速度曲线对比
由此可见,在跟车制动过程中,制动时机和制动减速度对整个制动过程有较大影响。制动时机偏晚,会导致制动减速度需求变大,制动减速度梯度变大,从而导致电动液压泵转速超调,从而引发制动噪声。制动时机合适,制动减速度曲线平稳无冲击,制动过程平顺舒适性好,无制动噪声。
4.2 用户驾驶行为数据对比
利用驾驶场景库数据,对ACC系统控制车辆制动减速过程和正常驾驶员控制车辆制动减速过程进行大数据分析,分析2者在制动减速度控制方面是否存在差异,判断ACC系统是否存在制动时机偏晚,制动减速度过大现象。
从该车的试验数据中提取驾驶员控制车辆制动和ACC系统控制车辆制动数据进行筛选提取,筛选出1万余条数据,然后对其进行聚类分析[18-20],将制动数据按照速度分类进行统计,对每一类进行加速度及制动时间的聚类中心进行统计,统计结果见表5,曲线见图6、图7。

表5 制动工况分析结果
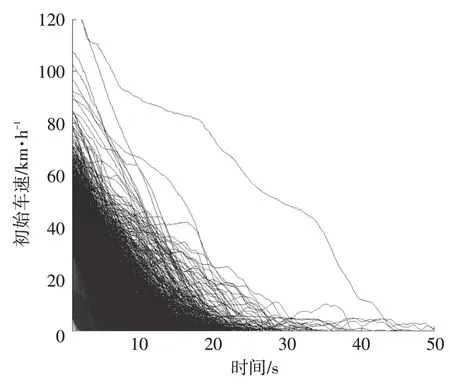
图6 人工制动数据分析

图7 ACC系统制动数据分析
通过对统计结果对比可知:
(1)随着车速升高,制动减速度呈下降趋势;
(2)驾驶员驾驶车辆制动减速度一般不大于1.2 m/s2,而使用ACC功能控制车辆,制动减速度明显偏高,尤其是在15 km/h车速以下,是正常驾驶员制动的1.45倍。
说明ACC系统在控制车辆过程中,尤其是在低速状态下,制动减速度需求偏高,容易引发制动噪声。
5 解决措施
通过上文对制动噪声问题产生原因的分析,结合对标数据分析,对ACC系统制动控制相关控制器进行策略优化,主要涉及到智能前视摄像头控制器(IFC)、车身稳定控制器(ESP)以及整车控制器(HCU)。
5.1 IFC控制器策略优化
优化IFC控制器,主要是从优化跟车时距和制动减速度梯度2方面进行优化:
(1)优化跟车时距。通过提高跟车过程跟车时距门限值,增加跟车过程中2车距离,从而在跟车减速过程中系统提前进行制动操作,从而降低制动减速度和减速度梯度的请求幅值。
(2)优化制动减速度梯度。通过对制动减速度梯度请求进行限制。对低速状态下的制动减速度梯度幅值进行限制,避免由于制动减速度梯度过大而引起的制动噪声。但是由于限制制动减速度梯度可能带来一定的安全风险,所以在控制策略中增加限制条件,当制动减速度请求大于4 m/s2时,抑制制动减速度梯度限制。在保证安全的前提下,减轻制动减速度请求对制动噪声的影响。
5.2 ESP控制器策略优化
优化ESP控制器,主要从降低系统响应敏感度进行优化:
(1)降低系统响应敏感度。针对ESP系统响应过快,当IFC控制器发出小制动减速度时,容易引起电动液压泵转速超调,从而导致制动噪声。
(2)优化ESP控制器响应时间,将其由50 ms放宽至200 ms,从而解决由于ESP控制器响应过于快引起的制动噪声。
5.3 HCU控制器优化
优化HCU控制器,主要对加速滤波、制动能量回收退出过程、制动能量回收能力3方面进行优化:
(1)优化加速滤波过程。针对加速扭矩滤波导致扭矩退出延时,造成ACC系统的制动扭矩需求突变,从而引发制动噪声的问题,通过优化加速滤波过程,降低信号延迟,使ACC系统制动扭矩需求平顺,降低制动噪声发生概率。
(2)优化制动能量退出过程。针对制动能量回收退出过快,导致ESP系统液压制动增压响应过快,引起液压泵转速超调,从而导致制动噪声。通过放宽制动能量回收退出速度范围,从而避免液压制动增压过快引起制动噪声。
(3)优化制动能量回收能力。提高电机制动能量回收能力,以减轻对制动系统对液压制动方面的需求,从而降低制动噪声发生概率。
6 效果验证
通过对相关控制器进行策略优化,自适应巡航功能下制动噪声问题基本解决。但在某些极端危险场景下,如:在跟随前车行驶过程中,前车紧急制动、相邻车道低速车辆近距离切入本车前方,仍然可能会有制动噪声的出现。
7 结论
本文对自适应巡航功能下制动噪声的发生场景、发生机理进行了深入分析,并提供了解决思路和解决方法,为后续解决类似问题提供了参考。
(1)结构原理分析。首先排除了一般制动噪声问题的噪声源-制动器总成,而是锁定制动系统中的电动液压泵,电动液压泵的转速超调是导致制动噪声的直接原因。
(2)特性要因分析。通过系统工作原理、制动噪声发生场景分析,锁定了制动减速度需求过大、ESP系统响应过于敏感、制动能量回收退出过快等根本原因。
(3)对标分析。通过与其他车型控制策略对标和用户驾驶行为数据分析,发现目前ACC系统控制车辆减速度偏大,跟车时距控制与制动过程控制策略不合理,为制动噪声问题解决提供策略和数据支撑。
(4)控制器的策略优化。对ACC状态下制动噪声产生的原因制定优化方案,通过优化IFC控制器、ESP控制器、HCU控制器的控制策略,制动噪声问题基本得到解决。
通过运用结构原理分析、特性要因分析、对标分析以及控制器策略优化等手段分析并基本解决了ACC功能状态下的制动噪声问题,为后续产品开发提供了经验和知识积累。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
电脑报(2022年24期)2022-07-01
中国自行车(2022年3期)2022-06-30
中国军转民(2021年11期)2021-12-13
舰船科学技术(2021年12期)2021-03-29
网络空间安全(2019年8期)2019-03-18
科技风(2018年6期)2018-10-21
大经贸(2017年8期)2017-09-26
饮食科学(2016年7期)2016-07-27
科技传播(2012年10期)2012-06-06
