基于激光扫描技术的三维仿真与管理系统应用
2021-09-01 10:10:28程建平刘昶杜书柱丁士文王俊李犁曹磊
城市勘测 2021年4期
程建平,刘昶,杜书柱,丁士文,王俊,李犁,曹磊
(合肥市测绘设计研究院,安徽 合肥 230061)
1 引 言
传统测绘技术难以完整、精细地记录楼宇空间复杂的结构体系、以及纹理信息的采集[1],此时面对大范围的楼宇空间的三维数据采集与建模,三维激光扫描技术的优势便凸显出来。三维激光扫描技术可以在不接触物体表面,直接采集物体表面的全部点云[2],背包式三维扫描技术更具有便捷、灵活、快速、精度高等特点,可以显著地提高工作效率[3,4],通过平台开发,建立三维模型信息管理系统实现楼宇的三维智能化管理。近年来,随着三维激光扫描技术的不断发展,在三维测量和建模管理方面也得到不断的应用[5~7]。
本文基于背包式三维激光扫描技术进行楼宇位置、外立面以及房间面积信息采集,结合照片纹理信息实现楼宇真三维场景的仿真建模,以及室外周边地物地形信息的DEM,DOM模型,进行联合建模,构建楼宇及周边一体化的三维仿真模型,开发数据管理系统,实现楼宇空间的三维可视化、数据查询、二三维联动以及漫游导航等功能。
2 测区数据采集与处理
背包式三维激光扫描仪采用实时定位与地图构件技术(SLAM)与分段平差技术相结合,并内置多传感器,适合室内、室外等多种环境的快速测绘,能够实时确定室内外场景扫描源所处的位置和姿态,在点云采集的同时,对全景照片进行采集,结合数据处理软件完成SLAM行走轨迹解算及平差,最终实现点云数据的自动拼接和输出。背包式三维激光扫描系统的三维仿真建模流程如图1所示:

图1 仿真建模流程图
2.1 控制点布设与测量
为了将点云数据转换到统一坐标系下,控制点布设在测区均匀分布,且密度为 150 m~200 m一组控制点(每组3个控制点,带高程信息)。控制点采用棋盘标靶,如图2所示,使用A4纸打印,将标靶贴在地上或者墙上。控制点坐标采用全站仪导线测量方式确定,高程信息采用三角高程确定。

图2 标靶
2.2 三维信息采集
开机初始化完成后,点击开始进行扫描采集。数据扫描采集时,应平稳行走,不急转弯、急停,有利于提高数据质量和扫描精度。
按预先规划好的路径行走扫描测量,局部扫描规划路线如图3所示,对楼宇空间进行三维激光扫描,获取三维点云数据信息,在扫描采集数据的同时对全景照片进行采集,为后期实景建模提供基础。

图3 踏勘扫描路线
2.3 点云数据处理
数据采集完,按轨迹解算、数据分段、闭环平差、去除移动物体等操作,最终导出点云。将数据分测段处理,分别解算各测段扫描轨迹,利用SLAM技术与分段平差技术相结合,特征点云数据匹配,解算轨迹,并对轨迹闭环平差处理,提高数据解算精度。同时采用软件对采集过程中移动物体的点云进行处理和移除,提高数据采集的质量。其数据处理过程中的轨迹解算、数据分段、闭环平差、去除移动物体分别如图4、图5、图6和图7所示。

图4 解算轨迹

图5 数据分段

图6 闭环平差

图7 去除移动物体
数据处理完,利用软件实现点云间自动拼接,且根据标靶的真实绝对坐标,将拼接后的点云数据进行绝对坐标定向获取绝对坐标。输出点云数据成果,三维点云成果如图8所示。

图8 局部三维激光点云成果
2.4 室内外三维模型建立
本次三维建模范围为某政务中心建筑的精细单体建模及地面模型,建模内容包括建筑模型、地形模型、交通模型、植被模型、水系模型及其他模型等。其中,地上建筑模型反映维度变化的 0.3 m的细节需精细表达。为便于后期对测区内模型精细管理,本次需将建筑模型分层、分户制作,建筑内部走廊、墙体(除墙体外,不含室内其他设施)等进行制作,建筑物及附属设施属性信息需表达完整准确。
室外建模时,在3ds Max中导入整理好的Dwg文件、影像图等,在CAD和影像图的基础上创建建筑模型,其建筑模型位置与CAD文件保持一致,如图9所示。

图9 建模前准备
对模型面数进行控制,能够准确表达建筑物的特征即可,无须将所有细节建模,同时去除多余的面,模型建好后,应删除多余的或没用到的点、线、面,对模型结构与贴图坐标起不到作用的面进行删除以节省数据量。
纹理映射(贴图),对于需要叠加在物体表面的,例如建筑立面的字或一些招牌广告等,做成片叠加在物体表面,面片与该物体的立面距离至少要达到 0.03 m,保证重叠面不闪烁,同时在侧面不能看到特别明显的两个面间的距离,如图10所示。

图10 纹理映射与贴图
室内建模时,首先纹理采集,通过现场对室内外环境拍照的方式,采集室内外环境的纹理照片,为后续室内外建模提供素材。
室内建模:导入3ds Max后,首先对墙体进行建模,然后运用画样条线和矩形等操作,采用挤出功能拉伸出合适的长度,进行墙体建模。一些没有实测的内部细物,例如门窗、装饰物等,根据所得尺寸和现场所拍照片进行建模,将建好的附件合并到主体建筑物的模型上。
纹理映射:对于建筑模型的纹理通常要到现场用数码相机获取照片,对照片进行正射纠正处理为正射影像,更改材质,将修改好的图片贴到材质球上面并赋给建筑物,再运用贴图坐标进行修改,尽量做到与实际相同的效果,最后渲染输出效果图。
建筑物轮廓及室内墙体建模完成之后,将所有的墙体都移动至正确的位置,然后找到相应的材质附到建筑物主体模型上。并赋予相应的砖墙材质、玻璃材质等,再做相应调整,提高视觉效果,最后得到与实际建筑物一致的模型。室内局部建模效果及整体区域建模效果分别如图11和图12所示。

图11 室内局部建模效果

图12 区域整体建模效果
3 质量检查与精度评价
三维模型建立过程是点云之间的一体化自动拼接和输出,因此模型内点云的数据质量情况难以体现,因此本文基于全站仪、测距仪等实地测量数据对模型的精度进行检查,从整个模型环境中提取距离、坐标与检测相对应的距离、坐标,进行比较,包括相对精度检测和绝对精度检测。
3.1 相对精度检测
相对精度的检测主要是通过模型中特征点间的实际量测尺寸和模型中量测尺寸进行统计比较,本文分别在实地和模型中量取了12个特征部位的尺寸,见表1特征部位的尺寸相对精度统计比较。

特征点相对精度统计 表1

续表1
3.2 绝对精度检测
模型建立后,通过设置特征点的标靶坐标进行模型的投影坐标的转换,使三维模型转换到标靶控制点坐标系下。因此本文通过测量模型特征点的坐标与实地测量的坐标进行比较,来反映其模型的绝对精度情况。模型的绝对精度统计如表2所示。

绝对点位精度统计表 表2
根据表2的数据进一步计算得到:


4 数据管理系统与应用
模型建立完毕后,对该模型进行管理系统搭建,采用Oracle 11g作为数据的物理存储介质,采用MicroSoft Visual Studio 2010.NET作为开发平台,利用Esri提供的GeoDatabase数据模型存储和管理空间数据,利用C#和伟景行的CityMaker SDK 7.0开发核心组件库,并以此组件库来搭建所有应用系统,实现从数据建库、数据管理、可视化、空间分析、数据查询与统计、项目管理、二三维联动等功能操作。三维展示系统可实现交互式浏览功能、选择、信息查询功能,可完成搜索定位、属性查询、信息标注等功能。部分功能展示如下。
视图功能,视图模块直接与用户的视觉产生交互,进入系统后首先展示出来的就是视图,视图包含二维视图及三维视图。
定位功能,用于地图快速定位操作,主要包括路名定位、单位名称定位等,用户输入要定位的关键字,便能自动漫游至目标楼宇。部分功能界面如图13所示。
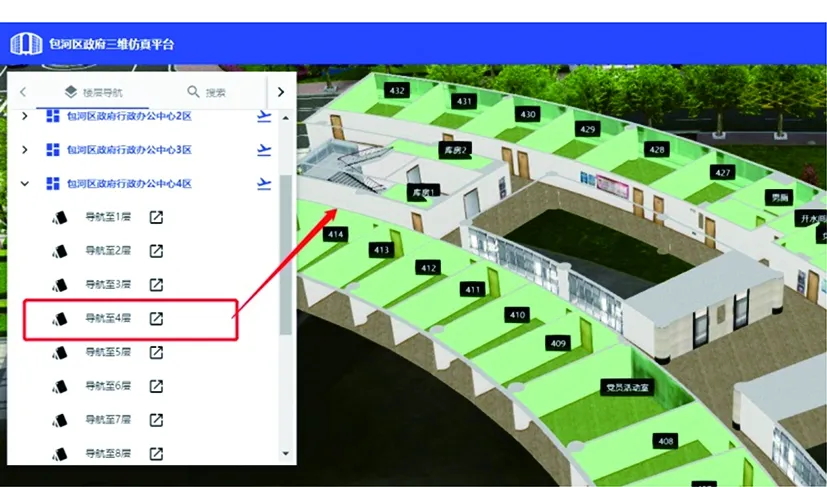
图13 导航至四区四楼界面
系统查询统计功能模块主要包括要素属性查询、图层属性查询、自定义属性查询、选择集查询、附件查询、自定义空间查询等,部分功能界面如图14所示。

图14 点击房间查看属性
统计分析功能,进行多种类型的统计分析功能,诸如统计工商管理局的办公室使用情况,根据统计结果能够合理地进行办公室的使用分配;再如统计某部门的人员构成,以确定该部门的人员配置是否合理。系统预先定义多种统计模型供用户使用,用户也能够自定义统计模型进行自定义统计。其部分功能界面如图15和图16所示。

图15 分类统计

图16 会议室管理统计
该管理应用平台具有丰富的应用功能,除了上述介绍的功能外,还包括数据的可视化、空间分析、项目管理、二三维联动等功能操作。可实现交互式浏览功能、选择、信息查询功能,可完成搜索定位、信息标注等一些自定义功能。从而对楼宇从层到户的精细化管理以及三维智能化决策辅助提供了一种方法。
5 结 语
本文主要基于背包式三维激光扫描技术对楼宇位置、外立面以及房间尺寸等信息进行采集,通过点云之间的自动配准及自动拼接技术,完成楼宇的三维模型,同时结合周边的地形信息、DOM、DEM模型等数据,构建楼宇及周边一体化的三维仿真模型,其精度表现相对较好。同时开发数据管理系统,完成楼宇空间的三维可视化、数据查询、二三维联动以及漫游导航等功能,实现对楼宇空间的实时查询和管理。相比于传统测量手段大大提高了工作效率,但海量的点云数据,处理相对麻烦,还有待在之后的工作提供点云利用率和解算效率。
猜你喜欢
建材发展导向(2022年6期)2022-04-18 08:17:34
创造(2020年7期)2020-12-28 00:48:22
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
中学生数理化·中考版(2017年6期)2017-11-09 02:46:46
非公有制企业党建(2017年10期)2017-11-03 02:26:27
现代兵器(2017年4期)2017-06-02 15:59:24
现代兵器(2017年4期)2017-06-02 15:58:14
中国公共安全(2017年11期)2017-02-06 05:27:52
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21