
高动态大多普勒猝发信号的三种捕获方法性能分析
2021-09-01 10:23宋可桢
数字通信世界 2021年8期
宋可桢,王 冲
(1.中国空间技术研究院通信与导航卫星总体部,北京 100094;2.北京遥测技术研究所,北京 100076)
0 引言
猝发通信在军事中有非常明显的应用优势,它的短时、突发特性可为通信提供很好的抗截获、隐蔽通信性能,其在获得上述优势的同时也对接收机,尤其是捕获器的设计提出了很大的挑战。本文针对三种常用的捕获方法,即滑动相关法、匹配滤波法、时频域二维搜索法,重点分析了各自在猝发信号捕获中的应用优劣势,并给出了相应的仿真论证结果。
1 算法仿真
1.1 滑动相关法
滑动相关法捕获原理是使本地PN序列时钟频率与接收PN序列时钟频率产生一定偏差,通过改变本地PN序列时钟的频率来改变码相位,使得两个码序列相对滑动直至相位一致[1-2]。
取时钟调整步进为Tc/2,接收到的PN序列相对于本地PN序列的相位延迟ΔTc=64Tc,多普勒频偏变化范围从-10kHz到+10kHz,积分时间取为TD=LcTc,滑动相关法得到相关峰值Z如图1所示。
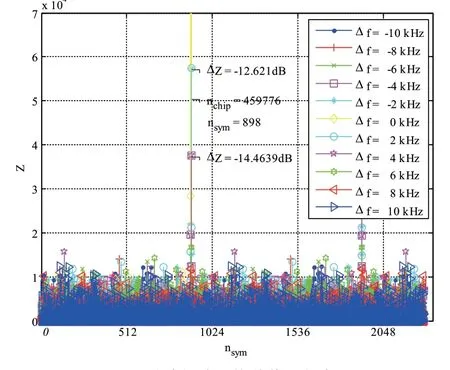
图1 滑动相关法捕获算法仿真
1.2 匹配滤波器法
匹配滤波器法依据最大似然准则将输入信号滤波后得到最大信噪比,从被噪声干扰的信号中最佳地判断信号的出现,从而提高系统的检测性能[3]。
同样取时钟调整步进为Tc/2,ΔTc=64Tc,多普勒从-10kHz到+10kHz,寄存器深度取为Lc,匹配滤波法得到相关峰值Z如图2所示。
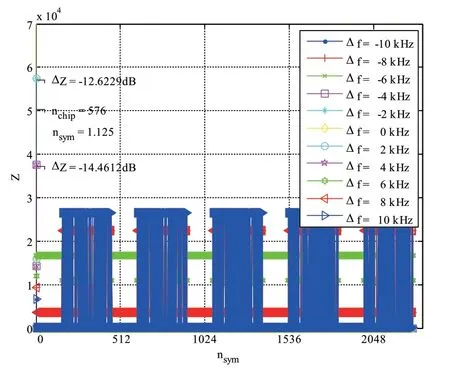
图2 匹配滤波法捕获算法仿真
1.3 时频域二维搜索法
时频域二维搜索法在一个频点上对码相位进行搜索,获取所有码相位的相关值,如果超过预先设置的门限则判定为捕获,否则将载波频率变换到另外一个频点,然后重复上述过程,直到找到正确的频点和相位[4-5]。
同样取时钟调整步进为Tc/2,ΔTc=64Tc,寄存器深度Lc,设置频偏搜索范围为-30kHz-+30kHz。多普勒频偏取为+30kHz,捕获相关峰值Z如图3所示。
2 性能分析
2.1 捕获时长
对于滑动相关法,设经过mSC次相位滑动实现捕获,则捕获时长TSC为

式中,TD为相干积分时间。在仿真中取ΔTc=64Tc,有

也即,滑动相关法经过459776个码片(898个符号)后实现了PN序列的捕获。
对于匹配滤波法,需经Lc级延迟完成移位寄存器的装载,设再经mMF次检测实现捕获,则捕获时长TMF为

在仿真中取ΔTc=64Tc,有

也即,匹配滤波法经过576个码片(1.125个符号)后实现了PN序列的捕获。
对于时频域二维搜索法,设经过nFEQ次频率搜索到达正确频偏位置附近,匹配滤波器经过mMF次检测实现捕获,则捕获时长TMF为

式中,NFEQ频域最大搜索次数。在仿真中,频偏搜索范围为-30kHz-+30kHz,多普勒频偏取为+30kHz,因此总捕获时长为

也即时频域二维搜索法经过60933个码片(约119个符号)后实现了PN序列的捕获。
可见,滑动相关法在接收PN序列与本地PN序列失配量很大时,搜索过程可能很长;匹配滤波法大大提高了捕获速度,但其硬件资源消耗也大大增加;时频域二维搜索法实现也较为简单,但当多普勒增大是捕获花费时间较长。
2.2 抗多普勒性能
发射信号s(t)可表示为:

式中,d(t)是符号数据序列;c(t)是PN序列;ωc是发送信号的载波频率;θ是[0,2π]之间的初始随机相位。
接收信号r(t)经下变频后I路、Q路信号分别为:
式中,θ′为经过上述运算后残留的相差。假设本地PN序列和接收PN序列之间的相位差为iTc,Tc为码片持续时间,定义码长为Lc,将I、Q两路信号与本地PN序列进行相关运算,当接收到得PN序列和本地PN序列对齐,相关结果为:
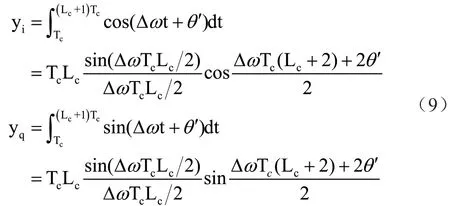
对齐位置的相关峰值为:

式中,Sa(x)=sinx/x,Tc、Lc为常量,令Δω=2πΔf,有:

从图4中可以看出,相关峰对频偏非常敏感,即使在接收序列与本地序列完全对齐的情况下,频偏也会对这个最大相关峰值造成削弱,削弱程度和符号速率fs有关。当频偏Δf接近fs的整数倍时,相关峰会趋近于0,意味着将很难或者捕捉不到信号。当Δf>1.11kHz时,频偏会对相关峰造成明显的削减,以至于难以判决信号是否已经捕获;当|Δf|>4kHz时已基本无法判决。因此,滑动相关法和匹配滤波法无法满足大多普勒需求,而时频域二维搜索可满足大多普勒要求。
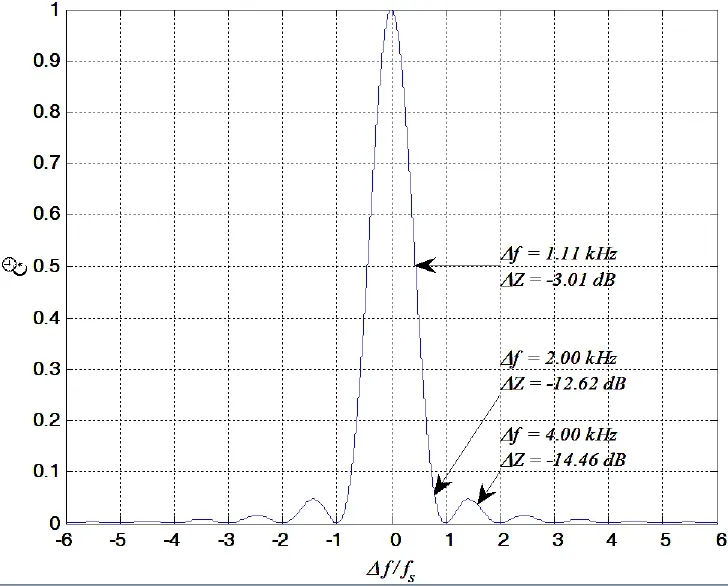
图4 PN码同步时相关峰随频偏的变化曲线
3 结束语
本文分析了三种常用捕获方法在高动态大多普勒猝发信号捕获中的应用性能对比。可见,滑动相关实在接收PN序列与本地PN序列失配量很大时,搜索过程很长且无法适配大多普勒需求;匹配滤波法捕获速度快但硬件资源消耗严重且无法适配大多普勒需求;时频域二维搜索法实现简单能适应大多普勒,但当多普勒增大是捕获时间较长。因此,后续设计可基于时频域二维搜索法进行优化,在考虑实现复杂度的同时缩短捕获时长。
猜你喜欢
数学小灵通·3-4年级(2021年9期)2021-10-12
成都信息工程大学学报(2021年1期)2021-07-22
小学生学习指导(低年级)(2020年10期)2020-11-09
制造技术与机床(2019年8期)2019-09-03
雷达学报(2018年3期)2018-07-18
意林(绘英语)(2018年1期)2018-04-28
北京航空航天大学学报(2017年3期)2017-11-23
数学大王·中高年级(2017年2期)2017-02-08
学苑创造·A版(2016年4期)2016-04-16
火控雷达技术(2016年1期)2016-02-06
