射流管阀磁量对气动舵机抖动的影响
2021-08-31 02:24常红常硕
航空维修与工程 2021年4期
常红 常硕
摘要:气动舵机作为制导装备中控制系统的执行元件,主要作用是在制导装备飞行途中控制飞行姿态和改变飞行轨迹。正常情况下装备保持稳定飞行,但在整弹检测时,偶有舵机抖动问题出现,影响装备使用性能。针对此类问题,通过深入研究气动舵机的结构、工作原理、关键部件特性,并进行大量的抖动试验进行验证分析,得出射流管阀磁量对舵机抖动的影响因素。
关键词:气动舵机;制导装备;抖动试验
Keywords:pneumatic steering gear;guidance equipment;jitter experiment
0 引言
气动舵机作为制导装备的关键组成部分,保证和提升舵机的执行精度是精准打击装备的重要一环,控制系统发出控制指令,舵机工作带动舵面偏转,控制系统将弹前部件提供的制导指令一起形成俯仰、偏航、滚转控制指令,三个姿态信号指令经过处理汇总后形成舵机驱动信号,传递给舵机回路,从而控制舵面偏转。但在舵机整体检测中经常出现舵机整体的连续不稳定抖动现象,一直没有找到很好的解决办法。本文对气动舵机的工作原理进行分析,提出射流管阀磁量可能是引起舵机抖动的原因之一,并根据现有手段对舵机进行分步试验验证,得出射流管阀磁量对舵机抖动的影响因素。
1 射流管阀磁量对舵机抖动影响分析
1.1 舵机工作原理
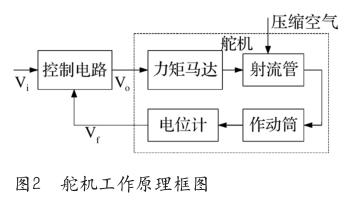
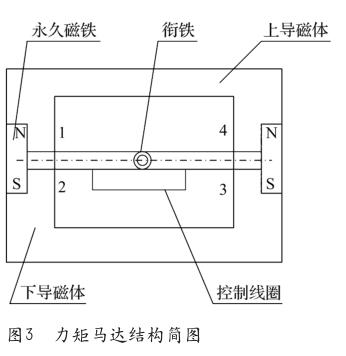
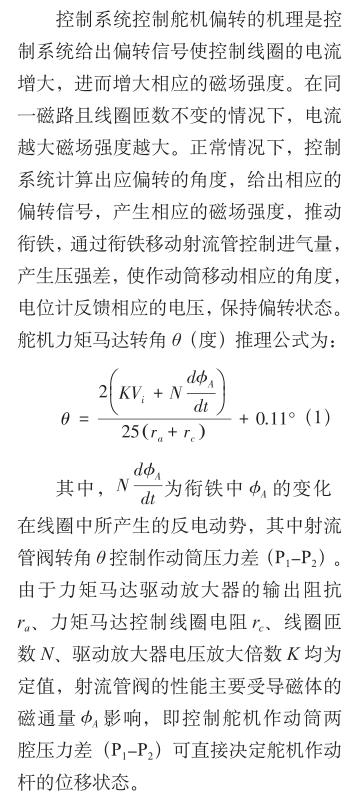
舵机可以分为射流管阀和作动筒两大部分,控制系统给射流管阀内部线圈供电,线圈产生磁场,通过磁场力的作用控制衔铁偏转,衔铁带动射流管偏转,使进出作动筒A、B两腔的气体发生变化,产生压力差。静止情况下,控制系统不发出偏转信号,射流管阀线圈不产生磁场力,衔铁处在零位,射流管不发生偏转,两腔进出气口保持平衡,fa1=fb1,fa2=fb2,形成两腔压力Pa=Pb,作动杆不运动。当控制系统发出向左偏转信号时,射流管阀线圈产生磁场,在磁场力的作用下控制衔铁并带动射流管偏转,造成进出气不平衡,两腔压力Pa>Pb时,作动杆向左偏转;同理,当两腔压力Pa 控制系统发出角度偏转指令,发出电压信号Vi,通过给线圈通电产生磁场力,控制衔铁偏转,衔铁偏转带动射流管偏转,射流管通过偏转改变作动筒两腔的进出气量,从而改变两腔的空气压力,使作动筒内的活塞杆左右偏转。通过位移变化,电位计反馈电压Vf增加,Vf的增加使放大器输出V0减少,从而带动射流管的偏转角度减小,最终衔铁稳定在与控制信号Vi相对应的位置,形成闭环回路。图2所示为舵机工作原理框图。 1.2 射流管阀工作原理 舵机偏转主要靠射流管阀衔铁偏转使进出气不一样从而形成压力差。因此,控制系统第一作用力作用在射流管阀上,射流管阀内各器件形成一个永磁式力矩马达,由永久磁体、衔铁、上下导磁体、控制线圈及支承轴承组成。舵机内射流管阀中力矩马达结构简图如图3所示。力矩马达中衔铁可以沿着支承轴承转动,静态情况下力矩马达中1、2、3和4处的磁通面积相同,衔铁处于零位。力矩马达内两个永久磁铁产生的磁动势通过上下两个导磁体及中间衔铁构成的桥式回路形成的永久磁场在气隙处产生永久磁通,静态情况下控制系统电流零输入,形成的永久磁通在各个桥式空间内产生的电磁吸力相同,使得处于零位的衔铁保持静止。通常将衔铁处于零位的力矩称为电磁弹簧力矩,理想状态下弹簧力矩与衔铁在桥式空间中偏转的角度成正比。当装备控制系统发出控制信号时,线圈产生一个可以使衔铁移动的电磁力,当处于零位的衔铁移动时,使桥式空间形成的电磁弹簧力矩变大,当偏转到一定角度时,控制系统形成的电磁力矩与新的电磁弹簧力矩处于平衡,以实现控制系统控制衔铁偏转到一定角位置的功能。 1.3 磁量对舵机抖动影响分析 射流管阀内部永久磁铁在正常环境下,理论上磁量基本不变,但永久磁铁可能受外界环境影响而导致磁量变化异常,如高温、高湿、交变磁场、机械振动等都可能使永久磁铁产生不同程度的磁性能变化。因此,推测射流管阀内部永久磁铁磁性能变化可能是导致舵机抖动的原因之一,下面对此做进一步分析。 从式(1)可以看出,在输入相同控制信号Vi的情况下,磁通量发生改变会引起力矩马达转角θ发生变化,导致出现压力差(P1-P2)的轻微浮动,从而影响作动杆产生准确的位移,在一定范围内由电位计反馈到控制电路的信号与控制电路形成的闭环自动控制系统会自动调节输出信号,调节舵机作动杆位移的位置,与理想狀态的误差极其微小。即当磁量正常时,控制系统给出一定的偏转角度电压,舵机会准确偏转到相应角度。由于依靠反馈环节进行自动调节,可以补偿扰动对系统的不利影响,闭环控制虽能提高系统的控制精度,但使系统的稳定性变差。磁量超出允许范围时,控制系统会给出一定偏转电压,偏转到相应角度,由于永久磁铁的磁量发生变化,使力矩马达转角θ发生偏差,当反馈电位计反馈的电压不符合自动驾驶仪给出的目标值时,自动控制系统输出调整后的电压,但因力矩马达磁量仍然不合格,导致在一定范围内控制电路频繁输出调整的电压以调整偏转角度,于是形成了舵机的振动现象。 2 舵机抖动试验 取两个试验舵机(A舵机、B舵机)进行试验,其中A舵机原有抖动明显,B舵机无抖动,本试验采用的设备包括气动舵机综合测试设备、气动舵机射流管阀综合测试设备、气动舵机充退磁系统设备。保存舵机综合测试设备的波形曲线与射流管阀测试设备试验数据,以便进行试验结果分析。
2.1 试验设备工作原理
试验所用设备的指标依据取自《自动控制原理及应用》,同时参照其他型号装备舵机的部分已明确指标进行设定。
1)气动舵机综合测试设备工作原理
本试验设备通过工控机发出测试指令,将气源控制台开启,提供作动筒驱动动力,通过信号调理箱的信号调理后再驱动舵机运动,带动负载装置的扭杆转动,扭杆变形产生的力用来模拟舵机工作时的负载。舵机内部作动杆运动状态由反馈电位计进行反馈,测控系统对反馈信号进行采集处理,并由显示器实时显示舵机反馈信息曲线。系统组成原理框图如图4所示。
2)气动舵机射流管阀综合测试设备工作原理
本试验设备包括射流管阀部件测试台架和测控系统。测试台架完成压力特性时气路转接、被测产品和相关传感器的安装固定,测控系统完成测试指令的生成及测试信号采集、处理、显示、存储等任务。气动舵机射流管阀测试设备有两大系统功能,分别为空载角位移特性测试功能和射流管阀压力特性测试功能。舵机射流管阀综合测试设备原理框图如图 5所示。
3)气动舵机充退磁系统设备工作原理
本试验设备由充磁机构、退磁机构和测控系统组成。充磁机构通过充磁机构线圈产生的强磁场完成舵机射流管阀部件的充磁,只需220V供电,手动压下开关,即可完成对射流管阀部件的充磁。退磁机构根据测控系统的指令,对已经装配好的射流管阀进行角位移特性测试,退磁后再自动进行角位移特性测试,重复上述过程直至角位移特性满足指标要求。气动舵机退磁系统原理框图如图6所示。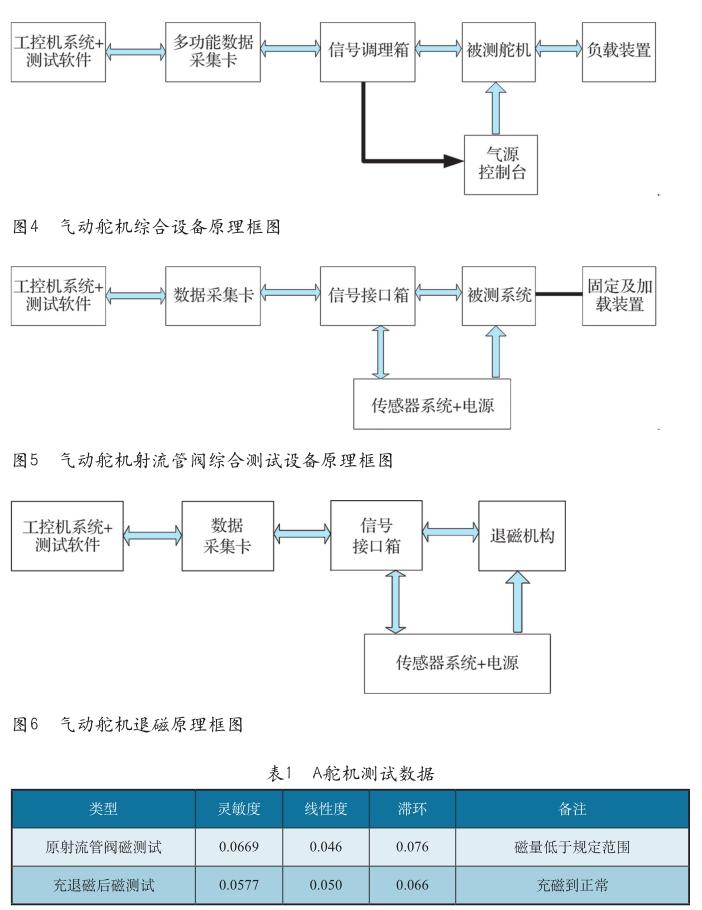
2.2 A舵机试验结果
A舵机进厂时抖动较明显。首先,对舵机进行综合测试,记录波形图,每次测试都进行三次,选取中间数值以防止人为误差。然后,进行射流管阀的磁测试数据记录,磁量小于规定范围。对射流管阀进行充退磁试验,将射流管阀的磁量调节到规定范围,再进行舵机的整体测试。A舵机测试数据如表1所示。
射流管阀磁测试的磁量大小主要看灵敏度,灵敏度越大磁量越小,磁灵敏度规定范围为0.056~0.060之间,从表1可以看出初始磁量低于正常范围,抖动较明显,当调节磁量到规定范围时,抖动明显减弱,如图7所示。
图7的a)、b)分别是充退磁前后舵机综合静态特性曲线,经放大抖动部分,充磁前抖动峰峰值约为0.6V,充磁后抖动峰峰值约为0.35V,且可明显看出抖动频率大大减弱,初步得出射流管阀的磁量对舵机抖动有影响。
2.3 B舵機试验结果
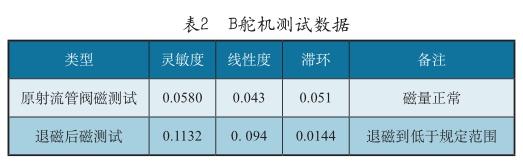
对B舵机进行舵机综合测试,测试合格且无抖动。对B舵机进行降磁处理,降到一定值后再进行舵机综合测试,观察是否出现抖动情况,由此进一步验证了射流管阀磁量对舵机抖动有影响。测试数据如表2所示。
图8的a)、b)分别是充退磁前后舵机的综合静态特性曲线,可以明显看出磁量改变后出现抖动。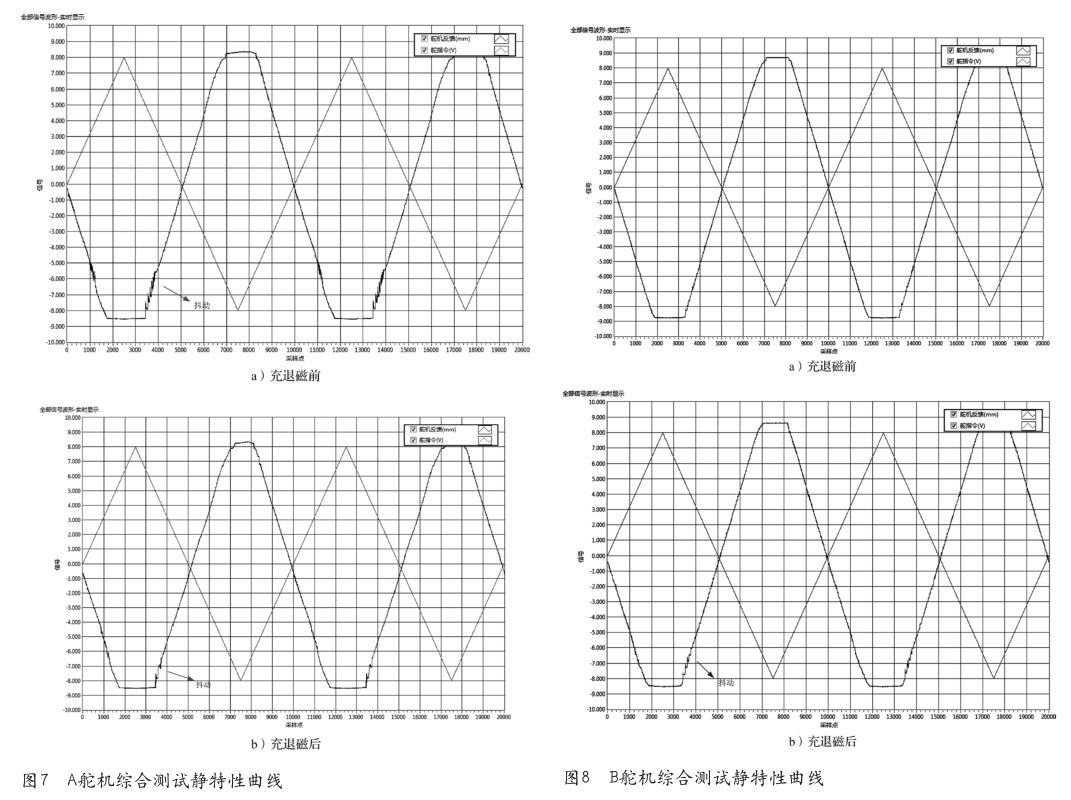
3 结束语
通过对某型装备两个舵机进行试验,得出舵机的射流管阀磁量对舵机抖动有影响,舵机抖动可以从抖动幅值和抖动频率两方面考虑。在舵机修理过程中如遇到舵机抖动问题可先进行充退磁试验,再做舵机综合测试。另外,从静态特性曲线可知,虽然通过调节射流管阀的磁量,使舵机抖动明显减弱,但抖动问题并没有消失,这说明还存在其他因素影响舵机抖动,下一步将针对其他因素进行试验论证。
作者简介
常硕,助理工程师,主要从事控制与导航专业装备维修与保障工作。