
核酸检测的咽拭子采样机器人系统开发
2021-08-31 02:20:28杨海涛孙占荣
机械与电子 2021年8期
杨海涛,丰 飞,魏 鹏,孙占荣
(江苏集萃华科智能装备科技有限公司,江苏 无锡 214000)
0 引言
新冠病毒的检测方法主要包括核酸检测(荧光定量RT-PCR)和抗体检测。目前,确诊新冠肺炎最主要的检测手段是核酸检测,通过直接对采集标本中的病毒核酸进行检测,具有特异性强和敏感度相对较高的优点[1]。
核酸检测采样目前采用的主要方式是口腔咽拭子采样检测[2]。在核酸检测咽拭子采样操作过程中,医护人员需要与患者近距离接触,患者咳嗽、用力呼吸等都会产生大量飞沫或气溶胶,会极大增加医护人员在采样过程中交叉感染风险。为了防止医护人员被新冠病毒传染和提升咽拭子核酸采样质量, 采用机器人替代医护人员进行口腔咽拭子核酸自主采样,这可以减轻医护人员工作强度和精神压力,降低医护人员交叉感染的风险,提高核酸检测采样的准确率,对于新冠病毒防控具有重要意义。
目前,国内外公司和机器人研发机构开发了大量机器人相关产品用于新冠病毒的防控,主要集中在消毒、配送和远程会诊等方面[3-10]。在此,研制了一款针对呼吸道传染病特种呼吸机器人,实现了人体口腔呼吸道咽拭子核酸采样检测。
1 咽拭子采样机器人系统
1.1 咽拭子采样机器人的系统组成
目前,口腔咽拭子核酸检测工作基本还是依靠医护人员手工操作完成。为了减轻医护人员核酸检测的工作强度并降低医护人员交叉感染的风险,研制了一套针对人体口腔内核酸咽拭子检测工作的采样机器人系统。
口腔内咽拭子采样机器人系统的组成如图1所示。根据咽拭子采样机器人系统的功能,将机器人系统划分为以下几个子系统:任务机械臂子系统;下巴托自动升降平台;咽拭子存储系统;采样后咽拭子保存系统; 信息交互子系统。
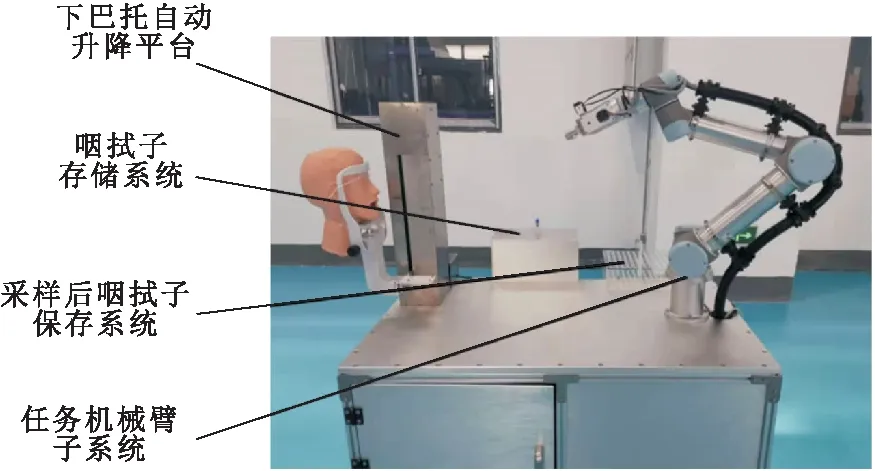
图1 咽拭子采样机器人系统功能组成
1.2 咽拭子采样机器人系统的通信
咽拭子采样机器人系统采用中央控制计算机实现对整个系统的集中控制,其与各个功能部件之间的通信方式如图2所示。中央控制计算机通过TCP/IP协议实现与UR5机械臂控制器、六维力/力矩传感器以及信息交互系统的通信;通过Modbus TCP协议实现与末端夹持器的通信;通过USB接口实现与三维立体视觉相机的通信;通过RS232串口通信实现与下巴托自动升降平台控制器以及咽拭子样棒自动存储系统的通信。
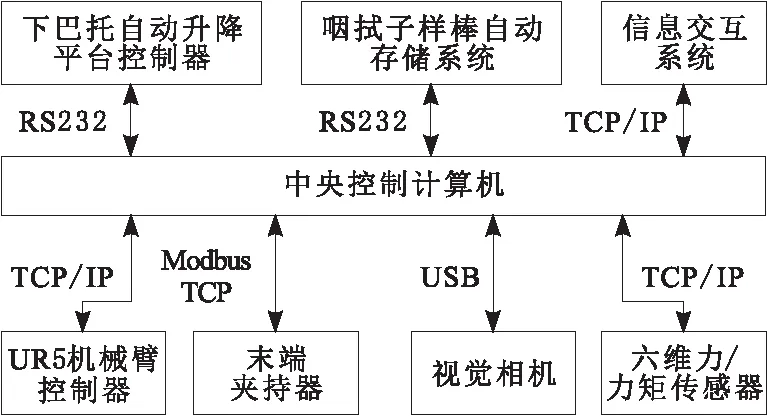
图2 咽拭子采样机器人系统的通信方式
2 咽拭子采样机器人的功能子系统
咽拭子采样机器人的各个功能子系统是完成核酸检测过程不可或缺的组成部分。
2.1 任务机械臂子系统
任务机械臂子系统是整个系统中最为核心的子系统,需要参与到整个采样过程中,主要实现自主取咽拭子、咽拭子核酸采样和咽拭子存放保存等操作任务。
任务机械臂子系统包括UR机械臂、末端夹持器和视觉相机等。UR机械臂具有6个自由度,末端额定负载为5 kg,最大臂展为850 mm,可以满足机器人在咽拭子采样过程中操作任务的工作空间需求。末端夹持器选用增广智能的电动模组,并针对咽拭子的管子专门设计了夹持机构。视觉相机选用红外双目视觉相机,用于人体口腔的定位。六维力/力矩传感器用于监视机械臂末端夹持的咽拭子与口腔内壁采样过程中的接触力,当接触力超过一定阈值后,机械臂进入柔顺控制模式,自动调节咽拭子与口腔内壁的接触力,让接触力始终保持在阈值范围内,从而不会对人体口腔造成伤害。
2.2 下巴托自动升降平台
下巴托自动升降平台子系统可以根据被采集者坐定高度自动调整下巴托升降平台。下巴托升降平台上固定了人体头部模型,人体模型在口腔里固定了1个口含器(咬嘴),用于机械臂末端的视觉相机的口腔定位。
2.3 咽拭子存储系统
咽拭子存储子系统能对一次性采样咽拭子采样管进行批量存储,并且具有咽拭子采样管顶出和夹紧功能,通过机械臂可以实现咽拭子的自动取出操作。
2.4 采样后咽拭子保存系统
采样后咽拭子保存子系统主要用于核酸检测机器人采样后的咽拭子封存和存储。
2.5 信息交互子系统
信息交互子系统负责实现筛查人员的互动式实名登记(人脸+ID)、流行病情况自主询问与建议、引导取样全过程、耗品废弃物与样品保存情况显示与提醒,以及测温过程引导等工作。
3 咽拭子采样机器人的工作流程
核酸检测机器人的咽拭子采样的整个实现流程如下:
a.采样人登记(人脸或者ID),并与采样管编码对应。
b.机器人通过视觉相机全程跟随正对被采集人的口腔位置,保持适宜距离。
c.被采集者将下巴托调整到合适高度位置,并佩戴好口含器。
d.被采集者准备好后,按动采集按钮,机器人通过视觉观察被采集人是否正确含入一次性专用口含器,并处在机械臂可达工作空间内,如高度不合适可以提示被采集者通过椅子之类升高或降低。
e.机械臂运动到达咽拭子样棒存储系统对应位置,取出一次性咽拭子。
f.机器人抓取咽拭子后定位到口腔部位,打开观察光束,进行取样部位初步定位。
g.机械手在初步定位下持咽拭子无接触穿过口腔前部,将咽拭子侧方贴近取样部位(两侧咽扁桃体、咽后壁)并较快旋转2周,离开复位后再贴近旋转2周,往返在每个部位执行3次(旋转几周、是否能旋转、用多大力接触后旋转或擦拭,需根据六维力/力矩传感器测量的接触力和采样实验效果来综合确定)。
h.实时监控机械臂末端咽拭子采样的接触力信号,当接触力超过设定阈值时,通过六维力矩传感器实现柔顺控制,保证接触力不会超过阈值,即不会对被采样者造成伤害。
i.通过机械臂末端的视觉相机定位口腔,并在动态过程中居中取出咽拭子。
j.取出后,机械臂通过视觉相机定位,将咽拭子插回咽拭子保存系统,旋转拧紧采样管,完成采样操作。
k.系统语音提示被采样人采样完毕,并显示采集编号和发送信息至其手机。
4 咽拭子采样机器人系统采样实验
咽拭子采样机器人系统中选用的UR5轻型机械臂其重复精度为±0.1 mm,绝对定位精度在未校准情况下为2~3 mm,校准后绝对定位精度会优于0.5 mm[11],能够满足采样实验对机器人运动位置的定位精度要求。机械臂运动能够保证位置精度,不会产生大的位置偏差,对人体造成伤害。
机械臂运动速度是根据各个子任务的不同区间来分别设置速度值。在距离人较远的自由空间中,为了节省采样时间,速度设置为最快;在与咽拭子插拔的接触操作过程中,速度与自由空间相比是较慢的;在进入人体口腔内进行采样的过程中,速度是最慢的,一方面是为了确保不会对人体口腔造成伤害,另一方面是为了保证咽拭子采样的质量。
咽拭子本身是非常柔软的结构,并且机械臂在运动过程中速度是非常缓慢的。此外,机械臂末端安装有六维力/力矩传感器,可以实时检测咽拭子与口腔内壁的接触力,并且为接触力设定了1个阈值,该阈值为人体口腔可接受的1个外力值。当接触力超过设定阈值时,机械臂由位置控制切换到柔顺控制,通过柔顺控制来调整机械臂末端的位置从而调整咽拭子与口腔内壁的接触力大小,从而保证不会对人体口腔造成伤害。
在咽拭子采样机器人系统采样实验中,机械臂的运动过程如下:
a.机械臂末端视觉相机定位人体口腔位置。
b.机械臂从咽拭子存储系统中取出咽拭子。
c.机械臂咽拭子的采样操作。
d.机械臂将采样后咽拭子放到咽拭子采样保存系统。
e.机械臂回到初始位置。
4.1 机械臂末端视觉相机定位人体口腔位置
咽拭子采样机器人系统中选用的相机为红外双目视觉相机。该相机主要用于人体口腔的定位,其在暗光线情况下和正常光线情况拍摄人体口腔口含器的图像分别如图3和图4所示,通过对图像进行处理,可以获得机械臂相对口腔的位姿信息,从而利用该信息视觉伺服引导机械臂运动。
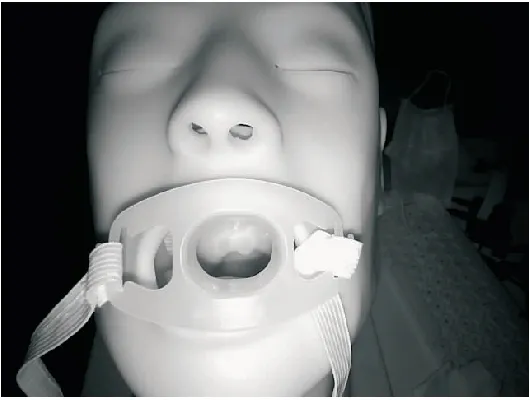
图3 在暗光线情况下的口腔口含器视觉图像

图4 在正常光线情况下的口腔口含器的图像
4.2 机械臂取咽拭子操作
机械臂在采样之前需要从咽拭子存储系统中取出一次性咽拭子,咽拭子取出过程分别如图5、图6和图7所示。首先机械臂到达咽拭子存储系统正上方位置;然后机械臂到达夹取咽拭子的位置,夹持器夹紧咽拭子的一端;最后从存储系统中取出咽拭子。

图5 机械臂取咽拭子之前状态

图6 机械臂末端夹持器锁紧咽拭子状态

图7 机械臂取出咽拭子状态
4.3 机械臂咽拭子的采样操作
在咽拭子采样实验中,机械臂在不同位置的运动状态分别如图8、图9和图10所示。采样过程首先是机械臂视觉伺服运动到人体口腔附近;然后机械臂视觉伺服运动到人体口腔内,进行采样操作;最后从人体口腔内取出采样后的咽拭子。

图8 机械臂视觉伺服运动到人体口腔附近
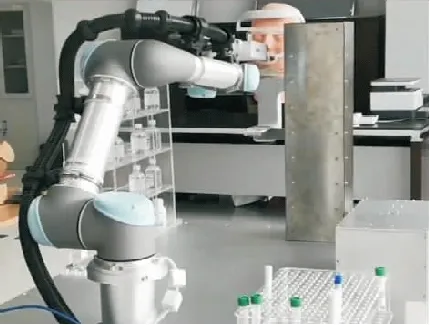
图9 机械臂视觉伺服运动到人体口腔内
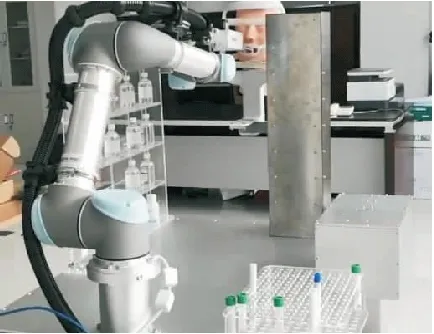
图10 机械臂运动体口腔内采样位置
4.4 机械臂采样后咽拭子放回保存系统
机械臂采样后需要将咽拭子放到保存系统中,采样后咽拭子放回过程分别如图11和图12所示。在这一操作过程中,机械臂需要完成的最主要任务是将咽拭子插到试管中。该操作机械臂的动作流程如下:首先机械臂运动到试管正上方;然后通过视觉和力觉配合,将咽拭子插到试管中,夹持器释放咽拭子,该操作任务完成。

图11 机械臂夹持咽拭子在试管正上方的状态

图12 机械臂将咽拭子插到试管中的状态
5 结束语
咽拭子采样机器人主要是针对口腔内核酸检测而开发的自动化系统,该系统可以用于医院或者社区对被测试者进行自动化的核酸采样。目前,系统还处于样机研制阶段,还未进行人体真实采样,无法给出采样准确率的相关数据。后续系统功能完善后,可以实现人体口腔的定位、自动取咽拭子、自动口腔内核酸采样以及采样后咽拭子保存等整个采样过程。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12 08:06:44
中华诗词(2022年9期)2022-07-29 08:33:50
中国慈善家(2022年3期)2022-06-14 22:21:55
快乐语文(2021年34期)2022-01-18 06:04:14
中国(俄文)(2020年8期)2020-11-23 03:37:13
哈尔滨轴承(2020年2期)2020-11-06 09:22:36
铁道通信信号(2020年3期)2020-09-21 09:13:00
发明与创新·大科技(2019年12期)2019-03-17 09:23:31
铁道通信信号(2018年8期)2018-11-10 05:15:44
中国教育信息化(2015年12期)2015-08-24 07:58:36
