基于H∞复合控制的并网逆变器控制策略研究
2021-08-31 02:20朱爱华曹芸凯
机械与电子 2021年8期
张 成,赵 涛,朱爱华,陈 静,曹芸凯
(1.南京工程学院,江苏 南京 211167;2.国网绍兴供电公司,浙江 绍兴 312099)
0 引言
随着微电网技术的不断发展,逆变器作为微网连接大电网的重要组成部分,在变流的同时,也能实现对谐波的抑制,提升电能质量[1]。
并网逆变器通常采用LC、LCL、LLCL滤波器进行滤波,但是它们都存在谐振尖峰问题,影响系统的稳定性[2]。现有的谐振尖峰抑制策略主要是有源阻尼和无源阻尼,与有源阻尼相比,无源阻尼需要在电容支路串联一个电阻,增加成本的同时也会增加功耗[3]。
现有的逆变器并网控制策略主要有PI控制、PR控制、重复控制以及模型预测控制等,其中重复控制是现阶段使用最多的控制策略之一[4]。传统的重复控制器由重复控制内膜组成,虽然能够消除动态系统周期性误差,但是其动态性能较差,因此,改进型重复控制器被提出[5]。文献[6]给出了一种改进重复控制器的设计过程,该控制器解决了传统重复控制器动态性能差的问题。文献[7]给出了一种电网频率自适应的重复控制器,通过在控制器的重复内膜引入频率自适应环节,以此提高控制器对电网频率的适应能力。
上述几种改进重复控制器设计过程都较为复杂,而文献[8]介绍了一种H∞控制的重复控制器,通过建立广义控制对象来求解重复控制的补偿器,实现对重复内膜的稳定补偿,提高系统鲁棒性。该方法求解过程简便,易于实现,求得的补偿器能够降阶成一阶函数,且不会影响系统特性。文献[9]采用了有源阻尼的方法抑制LCL滤波器的谐振尖峰,并且指出H∞控制有着较好的鲁棒性,在电压、电流控制中效果较好。
本文以三相LCL的T型三电平逆变器为研究对象,采用H∞控制以及电压前馈控制组成的复合控制作为并网逆变器的电流内环控制器,PQ功率环作为外环控制,同时结合有源阻尼策略实现对LCL滤波器谐振尖峰的抑制,提高系统稳定性。最后在MATLAB/Simulink对H∞复合控制的并网逆变器进行仿真实验,验证所提策略下并网逆变器输出电流的优越性。
1 三相LCL并网逆变器系统
三相LCL并网逆变器系统结构如图1所示,该系统采用双环控制,以功率环为外环,电流环为内环。图1中,ug为电网电压;Udc为直流侧母线电压;L1为逆变侧电感;L2为网侧电感;C为滤波电容;Rd为阻尼电阻;i1为逆变器输出相电流;i2为经LCL滤波后的电流;ig为并网电流;iL为逆变器本地负载电流;id、iq为经过功率计算得到的电流参考值。
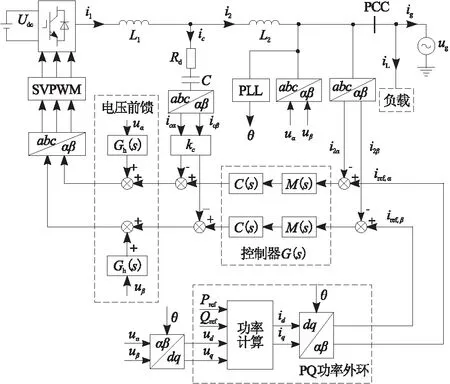
图1 三相LCL并网逆变器系统结构
图1中,功率外环的功率计算模块为
(1)
Pref、Qref分别为给定有功功率、无功功率;ud、uq分别为电网电压在dq坐标下的值。
三相LCL并网逆变器的电流内环控制结构框图如图2所示。
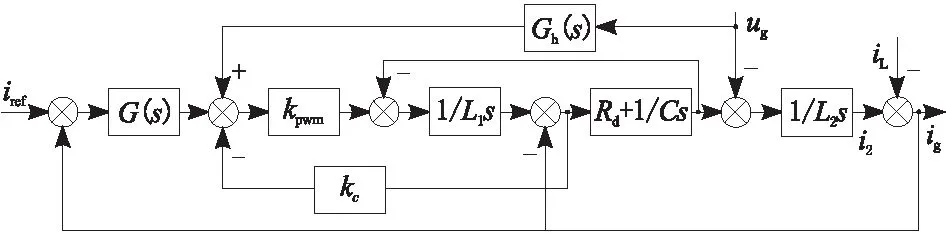
图2 并网逆变器电流内环控制结构
图2中,Gh(s)为控制系统的电压前馈环节;G(s)为系统的控制器;kc为电容电流反馈系数;kpwm=Udc/2utri为调制波到逆变侧电压的传递函数(其中utri为调制波幅值),这里kpwm取值为1。
2 H∞复合控制器的设计
H∞复合控制策略主要由H∞控制策略和电压前馈控制组成,具体设计如下。
2.1 考虑有源阻尼的H∞控制策略
2.1.1 有源阻尼下的系统状态空间模型建立
三相三线制的逆变器在三相参数对称时,在αβ坐标系下可以解耦成2个完全相同的单相逆变器[8],单相逆变器结构如图3所示。
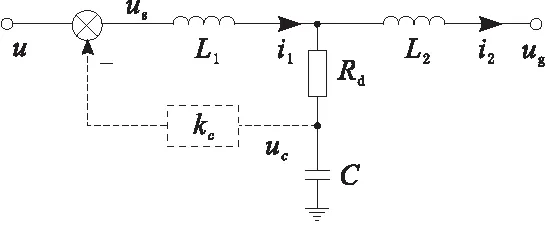
图3 单相逆变器结构
图3中,u为控制输入;kc为电容电流反馈系数;uc为滤波电容两端电压;us为逆变侧电压。选择i1、i2、uc作为状态变量x,建立单相逆变器状态空间模型,即
x=[i1i2uc]
(2)
采用ug和逆变器输出电流参考值iref作为外部输入w,可以得到
w=[ugiref]
(3)
同时,考虑到有源阻尼策略的引入,根据图3,则逆变侧电压us可以表示为
us=u-kc(i1-i2)
(4)
因此单相逆变器控制对象的状态空间表达式为
(5)
e=iref-i2为电流跟踪误差;A、B1、B2、C1、D1、D2分别为状态、输入和输出矩阵。
为了表达方便,用变量P表示控制对象,则有
(6)
2.1.2 控制器求解
图4为H∞控制策略框图,M(s)为重复控制内膜,由低通滤波器W(s)以及延迟环节e-τs组成。低通滤波器表达式如式(7)所示。
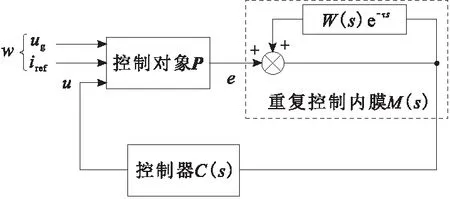
图4 H∞控制策略
(7)
ωc为低通滤波器截止频率。
对应的状态空间表达式为
(8)
延迟环节e-τs中的延迟时间τ与低通滤波器的截止频率满足式(9)时,重复控制对电网频率变化有一定的适应能力[9]。
(9)
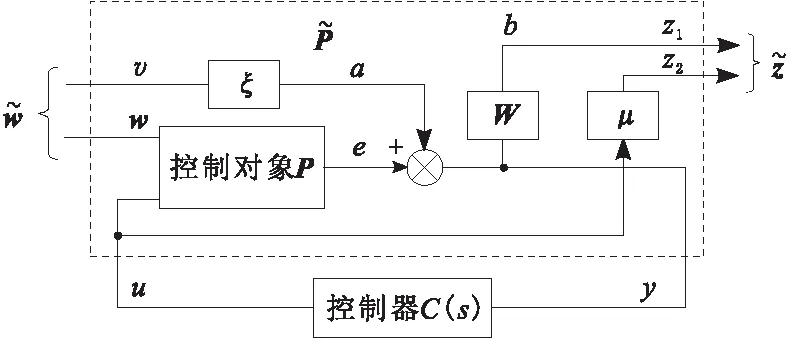
图5 广义H∞控制策略
由图5可以列出
(10)
(11)
对于图5所示系统稳定性的判断,只要判断当w=0时,图5中从a到b的传递函数Tba满足式(12),则系统稳定[8]。
‖Tba‖∞<1
(12)
文中并网逆变器系统的参数,如表1所示。

表1 并网逆变器系统参数
取加权系数ξ=1,μ=0.05,利用MATLAB中hinfsyn算法求解控制器C(s),求解得到的表达式为
C(s)=1.394 3×1014(s+823.8)(s2+7 459s+
15 600s+3.936×108)]
(13)
由经典控制理论知,传递函数的特性是由靠近虚轴的主导极点决定的,因此对式(13)进行降阶处理,降阶后控制器表达式为
(14)
根据式(12)对系统的稳定性进行判断,求得Tba无穷范数为0.297 1,满足式(12),系统稳定。
有源阻尼下的H∞控制为
(15)
2.2 电压前馈控制
对图2进行等效变换,可以得到如图6所示的等效变换框图。
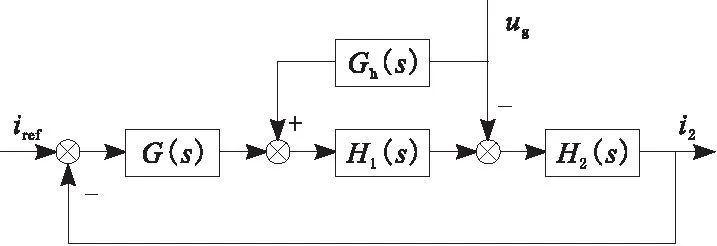
图6 等效变换框图
从图6中可以得到:
(16)
(kckpwm+Rd)Cs+1]
(17)
kckpwmL2Cs2+(L1+L2)CRds2+(L1+L2)s]
(18)
对式(16)进行计算,得到Gh(s)表达式为
(19)
令s=jω,进一步化简可以得到
(20)
由式(20)可知,电压前馈函数Gh(s)由比例、一次微分和二次微分组成。在低频段比例部分起主要作用,随着ω的增加,一次微分以及二次微分开始起主要作用,比例部分趋向于一个定值。同时,考虑到实际应用中微分难以实现[10],因此这里取比例部分,即
(21)
3 仿真分析
为了验证H∞复合控制策略下并网逆变器的优越性,在Simulink进行仿真实验,构建了如图1所示的逆变器仿真模型,仿真模型参数如表1所示。
当逆变器本地未接入负载时,此时给定有功功率Pref为10 kW(即id=32.24 A),无功功率为0(即iq=0),引入电压前馈前后的A相并网电流如图7所示,引入电压前馈前后输出电流性能如表2所示。
由图7可知,引入电压前馈后,可以提高H∞控制策略的响应速度,且能够降低并网电流的超调量。通过对表2的数据进行分析可知,引入电压前馈后可以降低输出电流的稳态误差,提高逆变器对参考电流的跟踪能力,进一步降低并网电流的THD值。

表2 引入电压前馈前后性能比较

图7 并网电流波形分析
图8为在0.2 s逆变器本地负载变化时(负载增加)的并网电流波形。由图8可知,在负载增加时,并网电流也随之变化,引入电压前馈与不引入电压前馈均没有冲击电流产生,并网电流迅速恢复稳定。

图8 负载变化时并网电流波形
图9为有功功率变化时并网电流波形。在0.2 s时,有功功率由10 kW变成5 kW,在0.4 s时,有功功率由5 kW变为10 kW(无功功率均为0)。由图9可知,在改变逆变器给定有功时,引入电压前馈与不引入电压前馈的并网电流波形均能平滑过渡,无冲击电流产生,且经过1个周期波形恢复稳定。
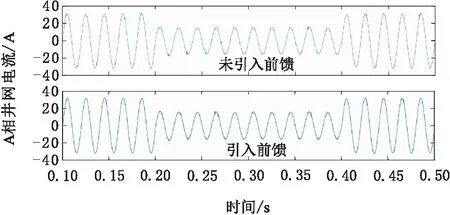
图9 有功功率变化时并网电流波形
4 结束语
本文采用了一种结合电压前馈控制的H∞复合控制策略作为逆变器电流内环控制策略,研究了其对并网逆变器输出电流性能的影响。通过仿真验证,结果表明:在系统引入电压前馈后,可以降低系统稳态误差,减小并网电流的畸变,也能提高系统的响应速度,降低并网电流的超调,同时,还能保持未引入电压前馈时负载变化以及有功变化的动态性能。
猜你喜欢
数学物理学报(2021年3期)2021-07-19
数学年刊A辑(中文版)(2021年2期)2021-07-17
数学物理学报(2021年2期)2021-06-09
哈尔滨铁道科技(2020年4期)2020-07-22
北方工业大学学报(2019年5期)2019-03-30
通信电源技术(2018年3期)2018-06-26
火控雷达技术(2016年3期)2016-02-06
广西文学(2015年9期)2015-10-24
电测与仪表(2015年12期)2015-04-09
电测与仪表(2014年14期)2014-04-04