
旋翼传感信号采集系统的指标评价体系构建研究
2021-08-29 08:33杨东旭
制造业自动化 2021年8期
刘 雄,伍 春,杨东旭,李 典
(1.西南科技大学 信息工程学院,绵阳 621000;2.西南科技大学 国防科技学院,绵阳 621000)
0 引言
旋翼地面试验过程中,旋翼传感器信号多数为微弱小信号,采集系统特性直接影响采集信号质量和气动特性分析准确性,旋翼传感信号对数据采集系统的性能指标提出很高要求,如何有效针对多类传感信号特性进行系统性地采集系统指标评价的问题尤为突出,而指标评价过程中选择合适的分析方法对数据采集系统指标评价极其重要。国内学者研究大多数是针对数据采集系统单一特性进行评价与分析[1~3],不能全面的评价系统性能,对特定传感信号采集系统性能的评价是不充分的,无法满足后续信号处理要求。
本文针对多量程传感信号应用需求,评估传感信号采集系统配置方案的动态应用能力。主要从其动态指标与静态指标方面分析采集系统指标。通过采集系统多次试验与仿真,优化了指标算法,分析指标与传感信号特性间的影响,建立完整的指标评价体系,给出采集系统在面对不同量程传感信号任务时完成采集的实际性能,以及采集系统综合指标分析结果,完成旋翼表面压力传感信号采集。
1 旋翼传感信号采集系统设计
旋翼传感信号采集系统结构如图1所示,数据采集系统对128个传感器的独立并行通道的信号进行调理和采集。根据不同类型传感信号特点改变采集量程,对输入量进行分级调理,提高数据采集系统精度,降低误差限。基于FPGA的核心控制模块与8个子采集模块采用SPI总线方式连接[4],采集芯片根据配置信息地址对其16个采集通道进行相应采集配置与数据回传。
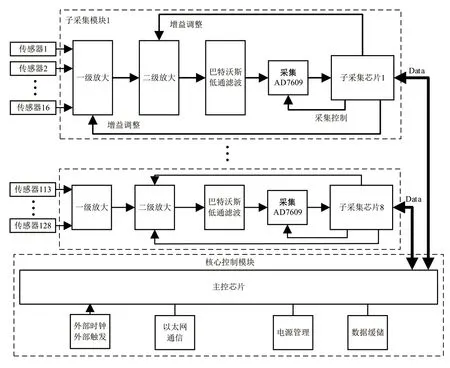
图1 数据采集系统结构
信号预处理先采用两级差分联合放大,并以OPA2277放大器构造巴特沃斯低通滤波器,降低噪声干扰。以采集AD7609完成高速模数转换。该采集系统支持外部时钟信号触发和连续采集功能,具有高可靠性、高维护性与高便携性。
2 旋翼采集系统指标评价体系
旋翼采集系统指标分为动态指标和静态指标两个部分,而动态指标评价是指标准交流信号下的系统增益精度、无杂散动态范围、共模抑制比、通道相位匹配、动态有效位及滤波器特性六个部分;静态指标评价是指标准直流信号下的多通道误差限、多通道线性度、拟合截距误差及静态增益精度四个部分。旋翼传感信号采集系统指标评价体系如图2所示。
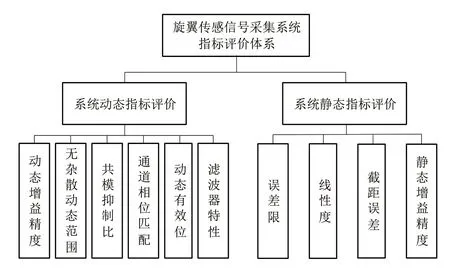
图2 旋翼传感信号采集系统指标评价体系
2.1 系统动态指标定义及方法
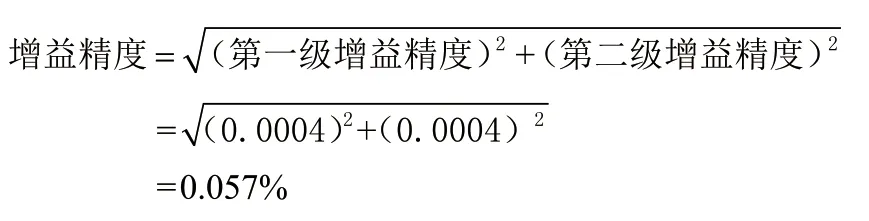
1)增益精度(GA)
增益精度指输入的标准信号源最大功率与采集系统输出端提供的最大功率之比的误差。增益精度是数据采集系统的重要指标,增益误差主要受放大器和滤波器的影响。级联后的增益精度理论计算如下:
2)无杂散动态范围(SFDR)
SFDR指在分析信号FFT分析频谱中信号幅度与最大谐波的距离关系[5,6]。SFDR取决于采集ADC在输入高增益传感信号时所能检测其最小信号的能力。
该采集系统AD7609典型动态范围最高为105dBc,但动态范围受到系统实际噪声以及其他谐波干扰的影响而下降。根据FFT变换处理得到幅频特性及各谐波分量,则无杂散动态范围计算为:
SFDR=20 × log10(基 波强度/次大谐波分量)
3)共模抑制比(CMRR)
数据采集系统匹配电路下,共模抑制比指差模与共模的程控增益倍数的比值。信号调理电路中,CMRR具体表明为差分放大电路抑制共模信号的能力[7]。旋翼传感信号采集系统理论仿真共模抑制比为70dB。共模抑制比计算为:
CMRR=20 × log10(差 分增益/共模增益)
4)通道相位匹配
在输入端匹配情况下,输出端通道间信号具有相同相位,达到最佳倍频效果。通道相位匹配一致性越高,信号误差越小,系统噪声抑制性能越好。
5)动态有效位
动态有效位数表示信号所受噪声干扰、电路器件质量及系统误差转化为量化误差与有效器件分辨率[8]。动态有效位反映了特定输入信号与系统采集信号的拟合度。

6)滤波器特性
滤波器特性分析主要分析其截止频率、通带平坦度与衰减情况等特性指标。这些特性指标直接反映信号幅度失真情况,与数据采集系统低频信号质量相关。
2.2 系统静态指标定义及方法
1)误差限
被测通道在信号E值处的误差限A按下列公式计算:
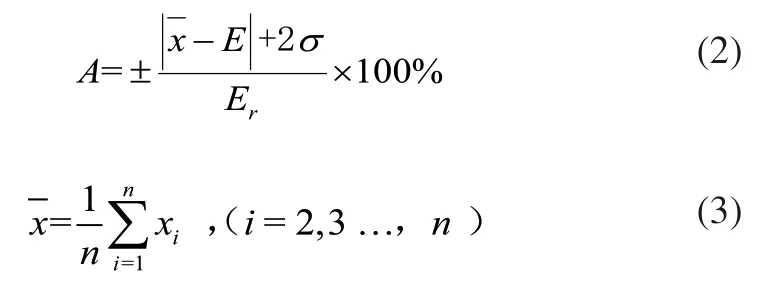
式中,xi为每个通道采集数据值;
为每个通道所有采集数据平均值;
n为每个通道的采集数据个数;
E为系统输入标准信号的幅度;
σ为采集数据的标准差。
2)线性度
线性度表明校准源信号与采集系统输出信号的一致程度。采用端基直线法,在传感信号的量程范围(EL,EH)内,适当选择11个等差信号测试点Ei(i=1,2,…,11)。图14为数据采集系统输入输出特性。
式中,EL为单通道的测量范围下限;
EH为单通道的测量范围上限;
Er为单通道的量程。
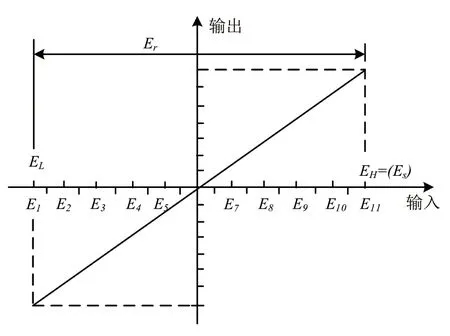
图3 数据采集系统输入输出特性
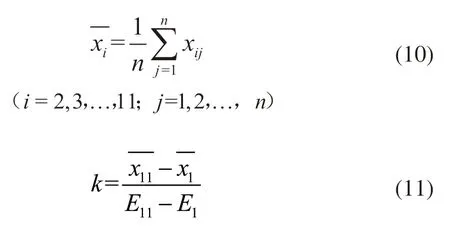
线性度:
式中xij为第i个信号点Ei上单通道输入的第j个测试点数据;
n为采集信号数据的点数(n≥100);
k为端基直线的斜率;
b为端基直线的截矩;
为第i个信号点Ei上测量n次的平均值;
3)截距误差
利用截距的标准差Sa作为判断发现系统误差。在一定程度上,可通过对拟合截距误差,为分析系统误差提供依据。
3 旋翼传感信号采集系统性能指标的评价
采用标准信号源(Fluke5720A多功能高精度校准器)作为输入信号进行一致性采样,利用MATLAB仿真处理输出信号。以64个通道为基础,根据旋翼传感信号采集系统指标评价体系及方法分别进行系统性能动态指标和静态指标的评价。
3.1 系统动态指标评价
选择标准信号源正弦信号作为系统输入信号,根据动态指标定义及分析方法得到各类动态指标。输入正弦信号频率0Hz、1KHz、20KHz;有效峰值15.91mV、31.82mV、63.64mV、3182mV分别对应增益倍数200、100、50、1;采集频率200ksps;采集点数 200000;分4组测试,正弦拟合法对每组16个通道进行评价。旋翼传感信号采集系统动态指标结果如下:
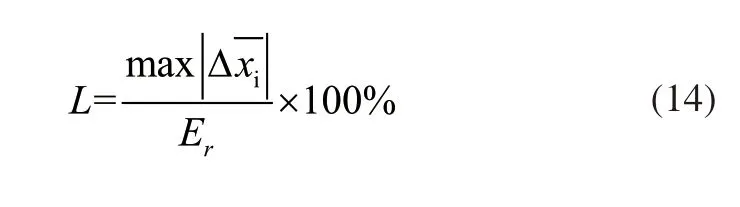
1)增益精度指标评价
1Khz增益精度指标评价结果如图4所示,增益倍数为1时,增益精度达到0.01%,增益精度稳定性最强,波动范围小于其他增益倍数,实际增益精度优于理论增益精度0.057%。增益倍数越大,增益精度波动越大,这是由于两级放大器AD在高增益时,增益误差逐渐放大。而在实际采集传感信号过程中,在巴特沃斯低通滤波器截止频率范围内,传感信号损失很小。
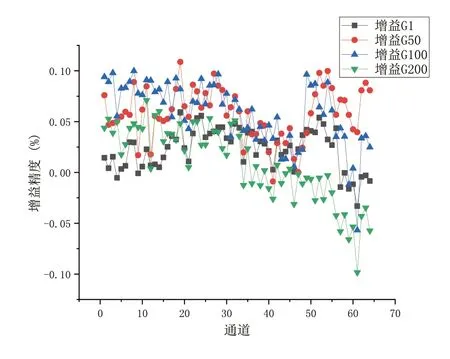
图4 增益精度指标评价结果
2)无杂散动态范围指标评价
无杂散动态指标评价结果如图5所示,采集增益倍数为1时,1KHz正弦信号的SFDR值达到75dBc,与理论SFDR差30dBc,这是由于差分不平衡、幅度失配、相位失配、信号线串扰等因素减小信号功率导致降低SFDR值。随着增益倍数的增大,无杂散动态范围稳定在62dBc;输入信号频率无杂散动态范围值呈反比例关系,即无杂散动态范围与增益倍数无关,与滤波器截止频率有关,存在明显的噪声影响。
图5 无杂散动态范围指标评价结果
将采集模块置于恒温80℃,恒湿20%,烘烤8个小时,对比测试结果表明,SFDR显著下降15dB左右,实际使用环境将严重影响无杂散动态范围。
3)共模抑制比指标评价
图6共模抑制比指标出现通道见上下浮动,增益倍数为1时,共模抑制下限最低为82dB,但其他增益倍数基础趋势不变,这是由于采集系统采集模块电路布局不对称导致信号放大后幅度不一致,出现信号共模抑制比波动严重现象。
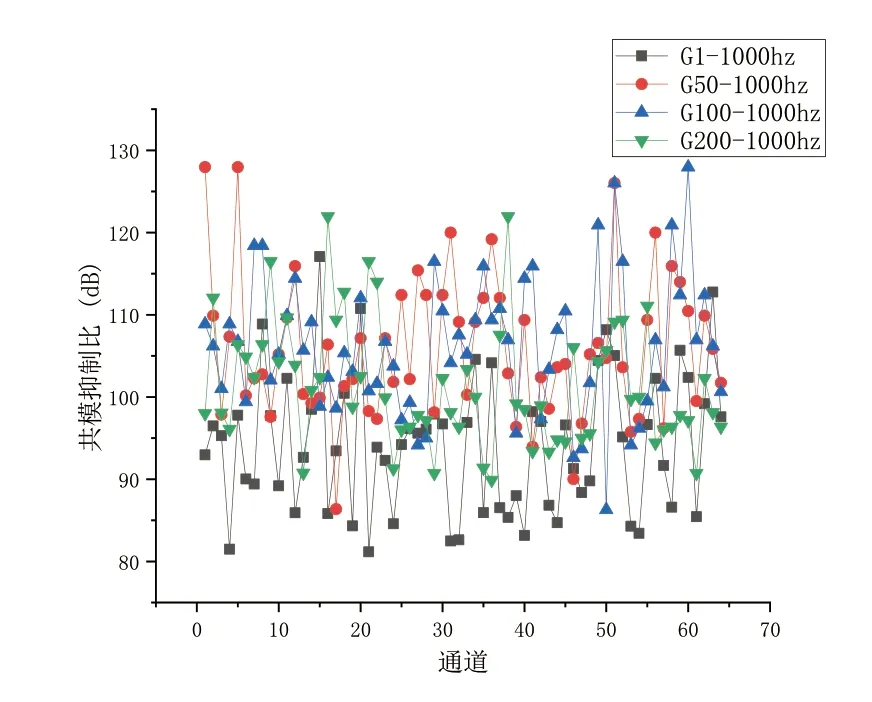
图6 共模抑制比指标评价结果
4)通道相位指标评价
所有通道相位分四次测量完成,所有通道方差约为1.37×10-4,每次测量16通道相位的方差约为2.17×10-4。图7所示,每16个通道出现大幅度波动,这是由于测试时间不一致导致的,而通道间信号时钟相位、增益精度误差直接影响通道相位匹配度[9]。在开环测试模式下[10],该传感信号采集系统通道相位一致性较好。
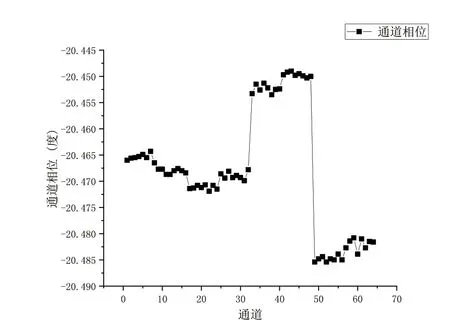
图7 通道相位指标评价结果
5)动态有效位
动态有效位为12.54,信噪比为77.27dB。
6)滤波器特性指标评价
巴特沃斯低通滤波器实际评价结果如图8所示,截止频率为19.20kHz。幅值下降为99%时频率点为6.21kHz,滤波器平坦度较好。
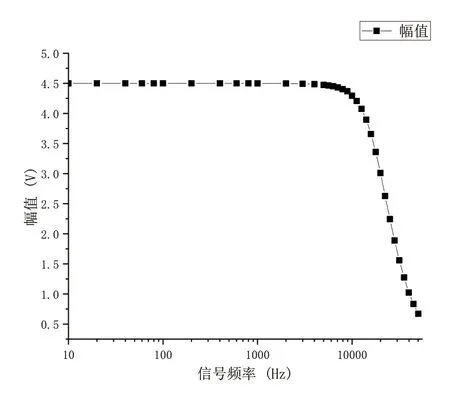
图8 滤波器特性曲线
综上所述,增益精度、无杂散动态范围、共模抑制比实际评价与理论结果基本一致;相位通道误差为0.01%,实际相位匹配度较好;动态有效位为12.54,信噪比77.27dB;低通滤波器特性截止频率为19.20kHz,与仿真19.5kHz基本一致。动态指标评价能够有效评价采集系统性能,满足准确、系统性地评价采集系统动态性能的要求,适用于分析采集系统特性。
3.2 系统静态指标评价
根据静态指标定义及分析方法,选择标准信号源直流信号作为系统输入信号,MATLAB仿真拟合正弦曲线,分析采集到的系统输出信号得到静态指标。直流信号幅值选取11个点,幅值范围:-5V~5V;-0.1V~0.1V;-0.05V~0.05V;-0.025V~0.025V分别对应增益倍数1、50、100、200;采集频率200ksps;分4组测试,每组16个通道进行评价。
1)误差限
被测64通道在信号增益倍数为1倍处的误差限结果如图9所示,相对误差限最大为0.0330%远小于0.1%,满足直流电压校准规范。
2)线性度
相性度结果与增益精度波动变化一致,如图10所示,而每16个通道出现一次较大波动,这是由于线性度受到随机误差和量化误差影响,特别是大信号尤为明显。相比于等间距法仿真结果[11],同时测试的16个通道间的线性度波动范围为4.88×10-4,校准源信号与采集系统输出信号的一致性较好。
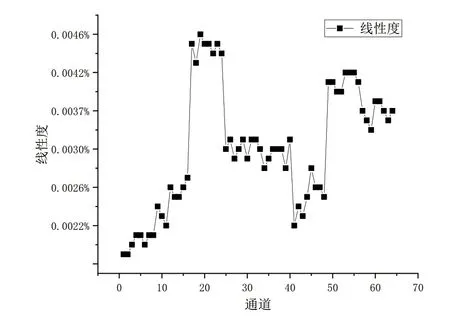
图10 线性度指标评价结果
3)截距误差
截距误差均值为0.0015满足增益精度0.1%要求。而截距误差包含随机误差和系统误差,即截距误差仅作为采集系统满足信号采集的依据。
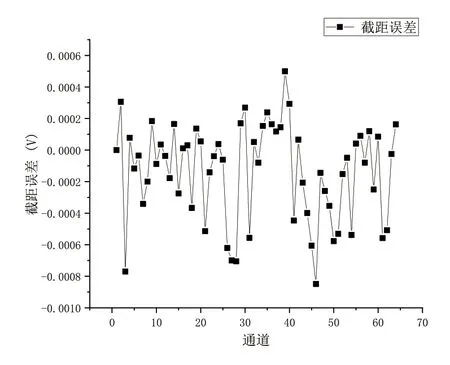
图11 拟合截距误差评价结果
该采集系统静态指标的静态增益精度与动态增益精度一致,达到0.01%。综上所述,静态指标结果满足旋翼传感信号采集要求,静态指标评价能够从误差角度评价该系统直流信号采集的性能。
4 旋翼脉动压力信号试验
旋翼各类传感信号为直流信号,即旋翼脉动压力信号静态试验在采集系统指标评价体系的基础上,以脉动压力信号为信号源完成两种类型脉动压力信号采集与分析,用于机翼气动特性研究。直升机机翼模型为五桨叶主机翼,其脉动压力传感器类型一数量为12个,脉动压力传感器类型二数量为31个。重复采集点数1000个,采集频率200ksps,量程选择增益倍数1倍,环境温度18℃,环境压强为1标准大气压。
图12为单通道两种类型脉动压力信号,经过低通滤波器后的时域结果。类型一压力传感器信号采集出现个别点出现很大波动,属于随机误差。经二阶有源滤波器处理,大信号采集质量更高。图13为两种类型的脉动压力传感器数据采集结果。在采集系统指标评价体系的基础上,所有传感器信号标准差小于0.0155%,每个传感信号波动小。传感信号采集误差满足增益精度要求,信号质量满足旋翼诊断信息处理要求,达到旋翼地面试验要求。
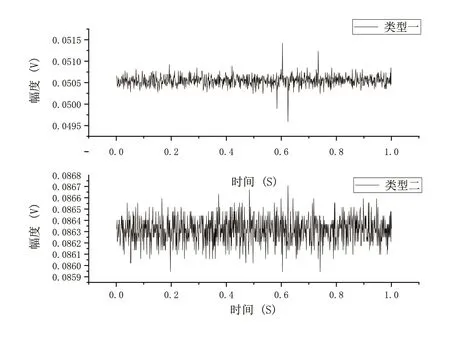
图12 单通道两种类型脉动压力信号
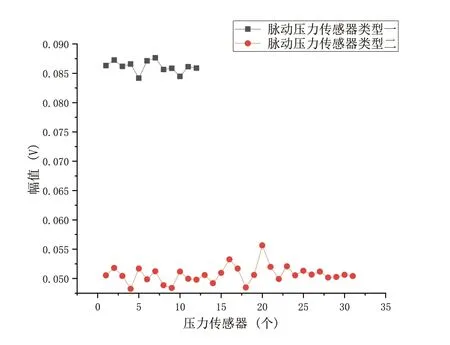
图13 两种类型脉动压力传感器试验采集结果
5 结语
本文提出了以旋翼传感信号采集系统为对象,通过仿真和实际测试建立数据采集系统指标评价体系,并搭载旋翼模型应用于静态压力信号采集试验,从而准确得出该采集系统的动静态指标,完成直升机旋翼表面压力信号时域分析,用于气动特性研究。采集系统评价体系能够有效评价采集系统综合性能,并为实际地面数据采集试验,提供了前期数据采集系统性能与增益倍数、信号频率间关系,并探究了影响旋翼传感信号采集系统性能的因素。
旋翼传感信号采集系统评价指标体系不仅适用于基于嵌入式技术的多量程数据采集系统,还可扩展应用于基于DSP技术的信号采集系统,充分发挥性能指标评价和系统优化的优势。
猜你喜欢
传感技术学报(2022年7期)2022-10-19
今日农业(2022年15期)2022-09-20
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年6期)2021-07-20
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年19期)2019-11-23
电子制作(2019年9期)2019-05-30
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
北京航空航天大学学报(2016年8期)2016-11-16
