
一种小型疲劳试验装置往复扭转机构的设计
2021-08-28 15:17刘永兴王强
中小企业管理与科技·中旬刊 2021年9期
关键词:设计
刘永兴 王强
【摘 要】许多零件在实际工作状态中承受动载荷的作用,与受到静载荷作用而产生破坏时会出现明显变形的情况不同,这些零件往往是在并未发生显著变形的情况下出现疲劳破坏现象。针对目前大多数高职院校的实验室都没有疲劳试验设备,无法给学生开展疲劳试验,严重影响了金属材料疲劳过程实验教学的现状,因此,研制一台结构简单、低成本、易操作的小型扭转与轴向拉压疲劳试验装置具有非常必要的现实意义。论文对这种小型疲劳试验装置的往复扭转机构进行设计与研究。
【Abstract】Many components are subject to dynamic loads in the actual operating state, unlike those that exhibit significant deformation when damage caused by static loads, and these parts tend to experience fatigue damage without significant deformation. In view of the fact that most of the laboratories in vocational colleges and universities do not have fatigue test equipment, they can't carry out fatigue test for students, which seriously affects the current situation of experimental teaching of metal material fatigue process, so it is of great practical significance to develop a small fatigue test device with simple structure, low cost and easy operation. This paper is the design and research of the reciprocating torsion mechanism of this small fatigue test device.
【关键词】疲劳试驗装置;往复扭转机构;设计
【Keywords】fatigue test device; reciprocating torsion mechanism; design
【中图分类号】TH112 【文献标志码】A 【文章编号】1673-1069(2021)09-0185-03
1 引言
许多小型零部件在实际工作状态中,会受到反复的扭转、拉伸等载荷的作用。当这种循环应力或应变达到一定次数时,零部件会产生疲劳现象,在应力或应变集中处出现裂纹直至发生断裂。目前很少有专门针对小型零部件的小载荷疲劳试验机,且国内大多数高职院校的实验室或实训基地都没有疲劳试验设备,无法给学生开展疲劳试验,严重影响了金属材料疲劳过程实验教学的现状,因此,研制一台结构简单、低成本、易操作的小型扭转与轴向拉压疲劳试验装置具有非常必要的现实意义。本文是对这种小型疲劳试验装置的往复扭转机构的设计与研究。
2 往复扭转机构的基本结构与原理
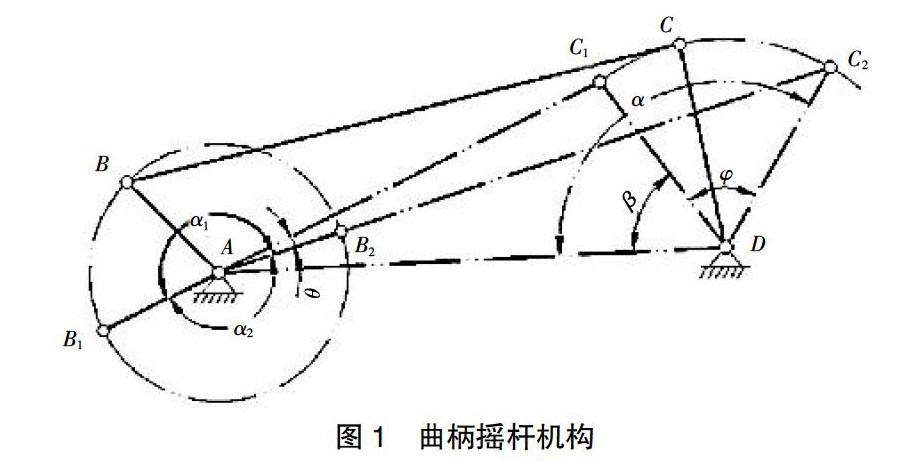
该往复扭转机构旨在尽量通过简单的机械结构来模拟实际工作状态中扭转运动情况,主要实现的机械运动为执行装置完成与铅垂方向左右摆角相等的往复摆动运动,与此同时,该往复摆动运动的摆动频率和摆角大小需要实现可调节性。通过对比凸轮机构、曲柄滑块机构、曲柄摇杆机构的结构、加工难易程度、经济型等条件,选择使用曲柄摇杆机构来实现往复摆动运动。如图1所示,曲柄AB与减速器连接,以恒定角速度ω进行圆周运动,摇杆CD实现往复摆动运动,曲柄AB转动1周,摇杆CD就跟随摆动1次,摆动幅度为极限位置C1D至极限位置C2D,摆动角度为φ,亦为极位夹角。
3 曲柄摇杆机构各杆件的参数关系
本课题往复扭转机构是为了使小型疲劳试验装置实现确定角度的往复摆动,故摆动角度与2个极限位置已知。即在已知曲柄摇杆机构中摇杆极限位置C1D、C2D和极位夹角φ的条件下,利用三角形正弦定理和余弦定理来求出各杆件之间的长度关系。当各个杆件之间的长度关系确定之后,整个曲柄摇杆机构的运动规律也就随之确定。所以应该首先对曲柄摇杆机构进行运动分析。运动分析有如解析法、图解法等多种方法,这里主要采用速度瞬心法进行曲柄摇杆机构的运动分析,在已知曲柄摇杆机构中摇杆极限位置C1D、C2D和极位夹角φ的条件下,利用三角形正弦定理和余弦定理求解各杆件之间的长度关系。
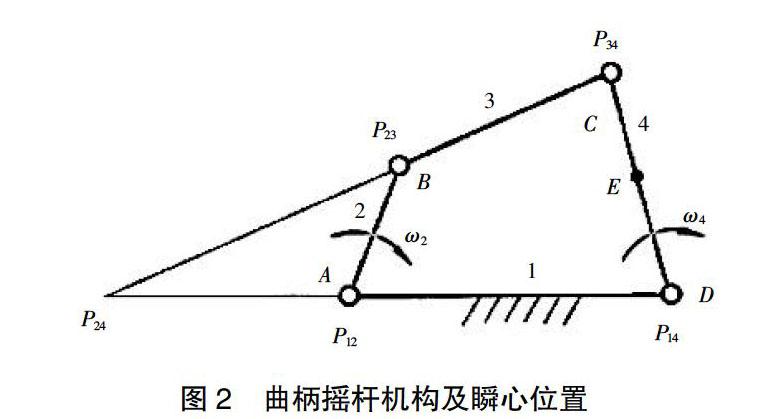
曲柄摇杆机构ABCD中,设AD为机架,曲柄AB与减速器连接,以恒定角速度ω2进行圆周运动,则曲柄AB为原动件,连杆CD为摇杆,各杆件AB、BC、CD与机架AD之间直接以转动副连接,所以,可以直接确定它们之间的瞬心位置,其速度瞬心位置就是转动副的转动中心点,分别为杆件1、2对应的瞬心P12、杆件2、3对应的瞬心P23、杆件3、4对应的瞬心P34、杆件1、4对应的瞬心P41。然而,杆件2、4对应的速度瞬心P24并不能直接观察得到,可通过三心定理进行确定:四连杆机构中,作平面平行运动的3个构件共有3个瞬心,它们位于同一直线上。速度瞬心P24的确定:对于杆件2、3、4来说,速度瞬心P24必然在瞬心P23和瞬心P34所确定的直线上,而对于杆件1、2、4来说,速度瞬心P24必然在瞬心P12和瞬心P14所确定的直线上,于是,我们可以确定,速度瞬心P24为直线P23P34与直线P12P41延长线的交点。具体速度瞬心位置如图2所示。
曲柄AB以角速度ω2做圆周运动,通过计算便可以得出摇杆CD的转动角速度ω4和C点速度Vc。速度瞬心P24为构件2和构件4的重合点,故有:
ω4 · P12P24=ω4 · P14P24 (1)
Vc=ω4 · CD (2)
由于摇杆CD要实现摆动角度为φ的往复摆动运动,则其摆动幅度分别对应为极限位置C1D至极限位置C2D,如图1所示。所以有:
Vc1=Vc2=0 (3)
ω4=0 (4)
根据式(1),有:
ω4=ω2=0 (5)
在式(5)中,P14P24作为分母不能取0,所以,只能分子P12P24=0。于是,我们可以得出这样的结论:瞬心P12和瞬心P24的位置重合,即摇杆CD的极限位置点C1与对应曲柄位置A1、B两点在同一条直线上,极限位置点C2与对应曲柄位置A2、B两点在同一条直线上。由于极限位置点C1、C2位置已知,选取其中一点任做一条不过另外一点的直线,使其与水平线相交,两线交角为θ。连接点C1、C2得到线段C1C2,过线段C1C2的中点做垂线,那么点D必在这条中垂线上。这样就可以有无穷多组连杆机构可以选取,如图3所示。
摇杆CD的极限位置点C1、C2,分别与对应曲柄位置A1、B和A2、B在同一条直线上,并与所表示机架的杆1、表示摇杆的杆4构成三角形,根据他们在极限位置时的几何关系,利用三角形的余弦定理可以求解出各个杆件之间的长度关系。假设杆2长为α,杆3长为b,杆4长为c,杆1长为d,C1、C2=H,摆角为?覫,极位夹角为θ,在中?驻AC1C2中,AC1=b-α,AC2=b+α,根据余弦定理有:
cosθ= (6)
在?驻AC2D中,设∠AC2D=β,则有:
cosβ= (7)
其中,設∠B2C2E=α,β=α-。在?驻EC2D中,根据三角形内角和得出:∠EC2D=。而在Rt?驻AB2E中,设EB2=h。
h= (8)
所以,在Rt?驻AB2C2中,设EB=h,则tαnα=。
α=arctan() (9)
又因cosβ=coscos(α+)+sinsin(α+),且在?驻DFC2中,因?驻DC1C2为等腰三角形,故:
sin= (10)
cos= (11)
cos(α+)·sin(α+=(12)
即:
在曲柄摇杆机构的运行过程中,摇杆CD与连杆BC的夹角∠BCD的大小是不断变化的,该夹角∠BCD即为传动角γ。连杆对摇杆在C点的力通过分解可知,传动角γ越大,力在摇杆运动方向的分力越大,机构的传动效果越好。所以为保证机构的传动性能,应使γmin≥40℃。对于曲柄摇杆机构,γmin出现在机架所表示的杆件1与曲柄表示的杆件2的共线处,如图4所示。
在?驻BCD中,BD=d-α,则有:
过上面各式,在一些参数已知的情况下便可计算出各杆件参数关系。
4 摆动角度的调节
本疲劳试验装置要实现对往复摆动运动的摆角大小可调节功能,可通过将曲柄设置为旋转盘来实现。不同的摆动角度对应摇杆不同的极限位置,通过上述计算式可以得到不同摆动角度对应的曲柄长度。在旋转盘上即可得到不同的角度调节孔,如图5所示,由减速器与旋转盘的电机孔联接,电机带动旋转盘做圆周运动,连杆与旋转盘中对应角度调节孔联接。通过计算,根据需要的摆杆摆动角度,获得不同的角度调节孔中心到旋转盘中心的距离。在实际操作过程中,通过改变连杆与旋转盘间的角度调节孔,从而实现不同的摆杆摆动角度。
5 摆动频率的调节
本疲劳试验装置要实现对往复摆动运动的摆动频率可调节功能,可通过调节电动机的转速来实现。电动机通过减速器与曲柄摇杆机构的曲柄联接,当对电动机转速进行调节后,曲柄角速度ω亦随之变化,从而实现摇杆摆动频率的变化。同时,综合考虑电动机的结构体积、输出功率、调速范围、维护方便和经济价格等方面的因素,初步选用微特电机D02系列三相异步电动机D02-5024,其主要参数为:额定电压220V,功率25W,转速r=1400r/min,效率η=0.38,功率因数0.82,外形尺寸为L×B×H=155×110×150。
6 结语
小型疲劳实验装置往复扭转机构的设计最主要的是实现摆动运动的摆动频率和摆动角度的可调节性,通过曲柄摇杆机构可以实现往复摆动功能;使用旋转盘代替曲柄,可以实现摆动角度的可调节性,旋转盘上角度调节孔中心到电机孔中心的距离亦可以通过计算获得;通过调节电动机转速实现摆动频率的可调节性。本机构的优点主要是结构相对简单,机构体积较小,故而加工、安装和操作都比较容易。
【参考文献】
【1】周启兴,陈涛,李兵,等.平面四杆机构的可视化设计与研究[J].南方农机,2019,50(06):11-13.
【2】王新海,陈志华.基于ADAMS的平面四连杆机构仿真分析[J].机械工程师,2018(06):17-19.
【3】Wu Rui et al.Mixed Synthesis Method of Motion and Path of Planar Four-Bar Linkages[J].Mechanical Sciences,2021,12(1):443-449.
【4】苏慧.曲柄与摇杆摆角的关系[J].湖北农机化,2020(17):118-119.
【5】刘明涛,翟凤潇,李彦启,等.内平动分度凸轮机构扭转刚度及其部分影响因素分析[J].天津科技大学学报,2017,32(02):55-61.
【6】冯宇,赵进科,赵雪瑞,等.物料仓仓门开闭机构的设计和动力学仿真[J].华电技术,2019,41(08):49-52.
【7】李宏亮,侯悦民,黄民,等.曲柄摇杆机构杆长的确定[J].机械工程师,2014(02):20-22.
【8】王美蕴.基于单片机的直流电动机转速控制系统设计[J].集成电路应用,2020,37(10):7-9.
猜你喜欢
河北画报(2020年8期)2020-10-27
现代装饰(2020年7期)2020-07-27
电子制作(2019年19期)2019-11-23
电子制作(2019年15期)2019-08-27
电子制作(2019年7期)2019-04-25
艺术启蒙(2018年7期)2018-08-23
海峡姐妹(2017年7期)2017-07-31
Coco薇(2017年5期)2017-06-05
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
舒适广告(2008年9期)2008-09-22
