冰川流域孕灾环境及灾害的天空地协同智能监测模式与方向
2021-08-26 01:28吴立新苗则朗陈必焰李志伟戴吾蛟许文斌
测绘学报 2021年8期
吴立新,李 佳,苗则朗,王 威,陈必焰,李志伟,戴吾蛟,许文斌
1.中南大学地球科学与信息物理学院,湖南 长沙 410083;2.中南大学地灾感知认知预知研究室,湖南 长沙 410083
中国大陆冰川十分发育,西部地区共有山地冰川48 571条,覆盖陆地面积51 840.11 km2[1]。山地冰川不仅是局部水循环和局部气候的重要调节剂,而且是气候干旱地区无可替代的水资源。山地冰川壮丽多姿、令人向往,还是独特的旅游资源和地理景观。因此,山地冰川兼具环境要素、自然资源和地理景观的多重属性。但是,山地冰川对全球气候变化十分敏感。随着中国西部气候逐渐由干冷型向暖湿型转变[2],山地冰川消融加剧,越来越多的冰川及冰川流域正在成为重大灾害的驱动因子与孕育环境[3]。
冰川跃动是冰川灾害的一种重要形式,是重力作用下冰川前进动力和阻力平衡被打破,冰川物质快速重布但总质量不变的运动现象[4]。山地冰川跃动时表面流速急剧上升,大量固体物质从高海拔位置转移到低海拔位置,进而演化成冰崩或冰川泥石流。冰川跃动机制主要分为“热力学控制”和“水文学控制”两种。其中,“热力学控制”是指冰川底部温度因物质累积和摩擦热达到压融点,底部形成润滑面,基底滑动随着润滑面扩张而持续增强,直至跃动发生[5-6]。“水文学控制”是指冰川底部水压持续升高并突破极限而跃动[7]。由于冰川体及其下游的冰碛物质量巨大,且海拔高、势能大,冰崩、冰川跃动及其引发的冰川泥石流可直接摧毁和吞噬冰川流域内及流域谷口附近的基础设施与人居环境。中国天山、喜马拉雅山和念青唐古拉山发育了大量复合型和海洋型冰川[8]。外部液态水(包括冰面融水和雨水)进入这些冰川底部后,可能导致底部水压突破临界值而触发冰川灾害。因此,在藏东南气候暖湿化背景下,喜马拉雅山东段和念青唐古拉山的冰川泥石流灾害频率会持续增加。针对冰川流域进行灾害风险评估与防灾减灾,以及在冰川泥石流灾害发生后进行应急处理,已成为国家及当地政府部门的重要工作内容。
冰川灾害一般具有链式发育特点,现有单一、常规的地灾观测手段[9-10]均无法满足冰川流域孕灾环境及灾害发展过程的精准与完备性监测需求。传统的泥石流监测方法,几乎没有顾及冰川流域上游复杂地形和陡峭山坡的动态变化[11];现有针对地质滑坡和矿区边坡灾害的天空地一体化监测方法[12-13],因孕灾环境的巨大差异而不能直接或有效应地用于冰川流域。在对藏东南典型冰川流域及灾害实地考察的基础上,本文介绍冰川流域孕灾环境与灾害的智能监测需求,提出基于天空地协同的智能化监测技术模式,旨在快速、准确、全面获取冰川流域灾害风险识别和灾害应急处置所需的基础空间数据与关键信息,对于推动现代测绘技术在我国西部地区防灾减灾和交通要道(如川藏铁路、川藏公路)安全保障工作中的新应用,具有重要的科技价值和战略意义。
1 冰川流域灾害监测的技术难点
波密县天摩沟是藏东南典型冰川泥石流灾害发育点之一。2007年9月4日、2010年7月25—31日、9月5—8日,2018年7月11—15日,天摩沟发生过大规模冰川泥石流灾害,多次严重损毁由东进藏咽喉要道(318国道)。天摩沟流域面积约18 km2,地形极为复杂险峻,主沟长7.1 km,沟口海拔2460 m,顶峰海拔5560 m,流域平均坡度39.8°[14]。流域内发育的现代冰川总面积4.7 km2,冰川末端海拔约3800 m[14]。野外科考照片显示(图1):天摩沟冰川上游地形陡峭、积雪丰富、云雾缭绕;冰川厚度大,冰川物质与周围基岩颜色区别较明显;冰川流域槽谷空间狭窄,边坡陡峭;边坡裸露、质地松散,显性及隐性泥石流物源极为丰富;下游植被茂密,谷口堆积大型扇形堰塞体。由于地形极为险峻,观测人员及地面设备虽可进入山谷下游短暂作业,但极难到达冰川槽谷中游乃至冰川之上。因此,对于类似于天摩沟这样的复杂冰川流域,任何单一的卫星遥感、无人机遥感和地面观测平台和技术手段,均无法实现时空连续覆盖与精准可靠监测。因此大量复杂冰川流域灾害监测是测绘领域有待开辟的新战场。
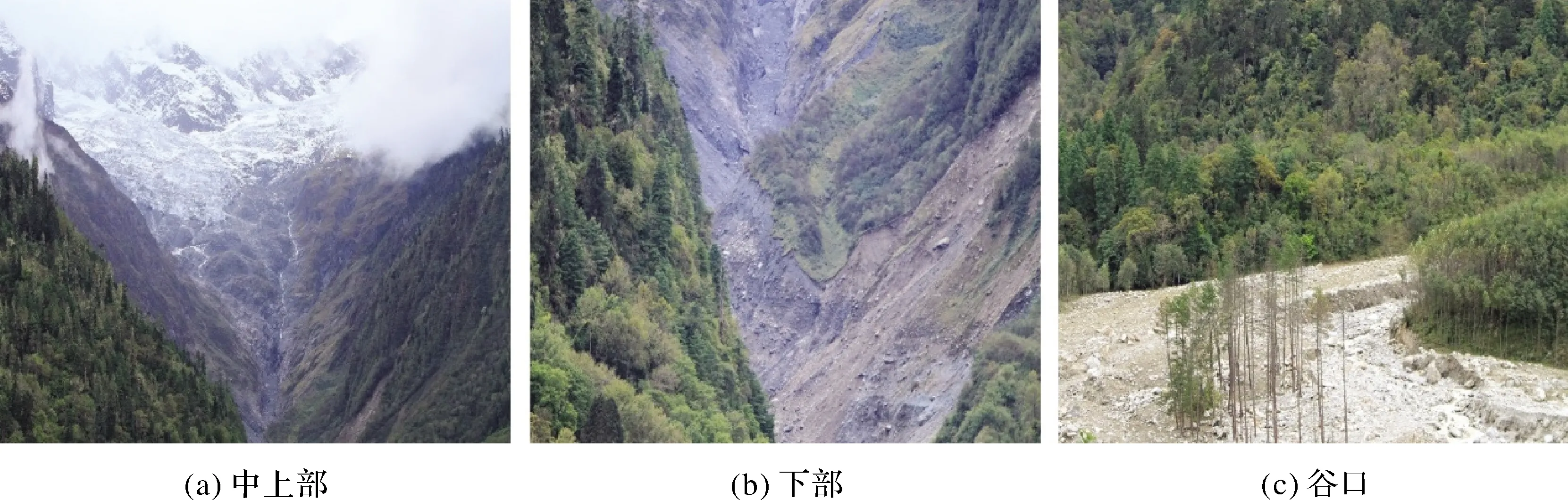
图1 西藏波密县天摩沟冰川流域及灾害照片(拍摄于2020年10月)
结合对藏东南多个冰川流域与灾害点的实地考察结果分析,发现与一般地质滑坡、泥石流、矿区边坡监测技术相比,冰川灾害监测具备以下基本特征:①监测范围更广,单一冰川流域面积可达10~103km2;②监测对象复杂,不仅包括位于冰川流域上游的粒雪盆与冰斗冰川、流域中游的冰蚀崖与陡坡、流域下游的槽谷与溜坡,还包括流域内的冰碛物、崩滑堆积体、冰碛湖,以及流域谷口的堰塞体等;③监测对象极不稳定,冰川流域形变速度快、崩塌多,监测对象的表面发射与吸收特性变化大,对遥感监测技术要求更高;④监测环境恶劣,地形复杂、云雾缭绕,海拔高、温度低、坡度大,监测对象距离人员可达位置一般超过5 km,有效观测视场十分窄小。因此,冰川流域孕灾环境及灾害监测对天空地网协同观测的要求更高、更迫切,亟须发展智能化协同观测技术。
2 冰川流域可用的现代测绘技术
现代测绘技术的快速发展为山地冰川流域孕灾环境与灾害的智能监测提供了可能。本文重点介绍3类可用于冰川流域的测绘技术,包括:①卫星观测技术,含合成孔径雷达(synthetic aperture radar,SAR)和光学遥感技术;②航空观测技术,含无人机(unmanned aerial vehicle,UAV)热红外遥感、UAV光学遥感和UAV激光雷达(LiDAR);③地面观测技术,含地基三维激光扫描(terrestrial laser scanning,TLS)、测量机器人等。本文择要对以上可用测绘技术的优缺点进行分析。
2.1 可用的卫星遥感技术
2.1.1 卫星SAR技术
由于SAR卫星信号可以穿透云雾、覆盖范围广、分辨率较高,在大面积和长时段目标高程变化观测方面有明显优势。通过SAR影像获取冰川流域的DEM,再与历史高程数据配准后差分,可获取灾害点冰川厚度变化和边坡高程变化[9,15]。但是,目前在轨SAR卫星大多采用重轨单发单收干涉模式,受大气变化、地表散射特征变化以及地表形变影响较大,无法获取高精度DEM;同步双轨单发双收虽然不受大气、地表散射特征变化以及地表形变(如冰川流动)的影响,无须地面控制点即可获取较高精度DEM,但目前可用的在轨民用星载同步双轨单发双收干涉SAR(interferometry SAR, InSAR)数据源仅有TanDEM-X影像,导致观测时间不够灵活。
基于相位信息的差分干涉(differential InSAR,D-InSAR)技术能获取地表在雷达视线向(LOS)的形变观测值,可用于滑坡形变和冰川运动监测[16-18],但其受目标散射特征变化、形变梯度和大气变化影响较大[19]。在D-InSAR技术基础上发展起来的时序InSAR技术(包括基于单主影像的PS-InSAR和基于多主影像的SBAS-InSAR),通过对多景SAR影像进行特定条件干涉组合来削弱大气变化和时空去相干对干涉相位的影响,可获取更高精度的地表形变[20-22]。目前,该技术监测地质滑坡和矿区边坡稳定性的国内外案例虽然较多[10,13,19-20,23-25],但对目标散射稳定性要求较高,仅适合简单地表覆盖条件,无法用于冰川流域的复杂地表环境。相比于D-InSAR技术,基于影像强度信息的匹配跟踪技术(intensity tracking)理论上监测精度更低,但受目标表面散射变化和形变梯度影响较小,且不受水汽变化影响,适合冰川运动和大型滑坡监测。基于单影像对,intensity tracking技术能获取目标在LOS向和方位向的形变观测值[26-28];若对同一轨道的多影像对进行小基线集强度跟踪(intensity tracking-SBAS)处理,则可在一定程度上提升时序形变监测精度[29]。虽然该技术在单一方向上的形变估计精度不及时序InSAR技术,但可基于单个卫星的升轨和降轨影像集获取真三维形变时间序列,有利于准确掌握目标动态,是相位失相干时的形变监测有效技术[30],在冰川跃动和滑坡监测方面已有一些成功案例[30-32]。
总体来说,经过40多年的发展,SAR技术在大气误差改正、轨道误差改正、低相干区测量、多维形变测量、时空分辨率改善等方面均取得了长足的进步[22],但由于采用斜距成像方式,SAR技术(包括intensity tracking在内)监测冰川泥石流灾害体时不可避免地受险峻地形、高坡角和南北坡向限制。
2.1.2 光学遥感技术
由于光学影像纹理清晰,通过对比不同时期的光学影像的分类与解译结果,可获取冰川面积、末端位置变化、边坡裂缝变化、物源种类和面积等信息,为泥石流形成机制分析提供证据支持[12,14,28,33-34]。基于空间前方交汇原理,光学遥感摄影测量技术可从立体像对提取DEM。将摄影测量获取的DEM与历史DEM配准后再差分,也可获取冰川的厚度变化和边坡高程变化[35-36]。由于光学卫星立体像对数据源丰富,影像幅宽较大,且光学DEM不受冰面信号穿透影响,目前星载光学DEM差分是估计高分辨冰川厚度变化的主流方法[37-40]。但是,光学信号受云雾干扰,而且冰川积累区表面的新降雪会导致表面缺乏纹理特征,星载摄影测量技术可能因立体影像无法匹配而失效。
基于光学影像的互相关匹配可获取目标二维形变。类似SAR intensity tracking技术,光学影像匹配的核心步骤是寻找主辅影像中的同名点,通过计算同一框架下主辅影像上同名点之间的坐标偏差来获取目标形变量。同名点定位可直接基于像元亮度值进行,其原理与SAR影像intensity tracking同名点定位过程相似,也可基于像元亮度值转化的频率域相位值来开展[41]。得益于星下点成像方式,山地条件下光学影像比SAR影像的畸变程度小得多。对于陡坡滑移形变和冰川流动形变估计来说,光学影像匹配比SAR intensity tacking更稳健,而且数据源更丰富。目前该方法在滑坡和冰川形变监测中均有较多应用案例[32,42-47]。但是,类似于摄影测量技术,光学影像匹配技术也会因云雾和降雪而失效。
2.2 可用的航空遥感技术
2.2.1 UAV热红外遥感
高位陡峭坡体的冻融风化和沟谷边坡的冰川融水侵蚀,是冰川泥石流灾害崩滑物源产生的重要原因,而陡峭坡体冻融风化程度和沟谷边坡融水侵蚀程度均与介质的渗水率或含水量直接关联。通过现场观察或多光谱影像分析,一般难以区分物源区的含水量、孔隙度与风化程度。热红外成像技术利用目标与周围物体之间的亮温差异,基于红外辐射能量密度分布进行热成像识别与特性分析。由于水的热容量和热传导性能明显高于岩土介质,太阳照射时含水或渗水岩土目标的温度上升速度明显慢于干燥目标,尤其慢于破碎及疏松多孔的干燥目标。此外,由于水分蒸发时需要吸收热量,导致目标表面温度降低,无热源时含水量较高的坡体温度也比其他部位更低。
基于上述目标特性,可利用热红外遥感探测渗水的陡峭坡体和冻融风化岩体对象,识别物源区的崩塌隐患体,分析物源区的风化程度和松散程度[48-51]。热红外相机既可架设于地面,也可搭载于UAV上进行长距离成像观测,作业方式较灵活,成本较低。但是,热红外遥感只能反映崩塌隐患区的空间分布与变化,无法定量估计潜在物源体积。
2.2.2 UAV光学遥感
UAV摄影测量机动灵活、成本低、时空分辨率高,被广泛用于地质勘查和灾害监测。UAV摄影测量原理与航空摄影测量原理类似,利用共面条件方程来获取像片间的相对位置关系:将所有像片纳入到统一的空中三角测量模型中,利用UAV配套的RTK信息和少量地面控制点来求解像片的外方位元素;再通过同名点空间前方交会解算像元点的地面坐标,生成目标区高分辨率数字表面模型(DSM)和数字正射影像(DOM)[52]。通过对高分辨率DOM时间序列进行目视解译,可初步检测边坡地形地貌条件、沟内松散物源种类(包括冰碛物、崩滑物源、沟内堆积物源[14,53])、物源组成(包括黏土颗粒、砂土颗粒、砾石颗粒[11])和物源移动情况,以及边坡滑移垮塌情况[54-57]。
由于UAV影像的空间分辨率为厘米至分米级(取决于相机像素与成像距离),可据此发现高分卫星难以感知的地表裂纹[58]。通过对UAV影像进行运动结构恢复(structure from motion,SfM)可获取灾区影像三维场景和DSM,估计滑动的物源体积,有助于灾情调查[59]。通过差分不同时期UAV光学相机获取的山谷DSM,可精细估计地面高程变化和边坡形变;若结合与DSM处于同一格网下的DOM分类结果,还可定量估计冰川、崩滑物源、沟内堆积物源等目标的体积变化,精准掌握冰川物质和沟内物源的移动情况[60-64]。但是,UAV光学遥感也受云雾和地表积雪影响,且光学信号无法穿透植被获取地面信息。此外,UAV本身还受飞行条件、续航能力和航高限制,在高山地区的作业能力受到制约。
2.2.3 UAV LiDAR系统
现有的UAV LiDAR系统集LiDAR、CCD相机、GNSS、惯性测量系统于一体,可以精确获取高分辨DEM、DSM和DOM。因系统自带定位定向装置,无须布设地面控制点,只需在测区周围安置1台以上GPS基准站即可。LiDAR主动发射激光信号,无须影像匹配而直接获取地表点三维坐标,在夜晚或者地表积雪时也能工作。由于激光束可穿透稀疏植被(冰川流域植被区以灌木为主),LiDAR可获取边坡地表三维形态[65]。若将UAV LiDAR系统获取的正射影像与三维点云相融合,还可获取隐患滑坡体轮廓,估算潜在泥石流物源量[12,66-69]。通过差分不同时期UAV LiDAR获取的山谷DSM,也可精细估计地面高程变化和边坡形变;若再结合与DSM处于同一格网下的DOM分类结果,则可进一步估算冰川、崩滑物源、沟内堆积物源等目标的体积变化[70-71]。但是,UAV LiDAR系统作业成本较高,其CCD获取的是小相幅影像,生成DSM和DOM是两个独立过程,存在二者的匹配问题。此外,UAV LiDAR系统也受水汽云雾影响,对山区蒸发水汽的敏感度要大于UAV摄影测量。
2.3 可用的地面观测技术
2.3.1 TLS技术
星载和UAV测量手段在冰川流域陡坡地区的有效观测数据较少。携带较方便的TLS是一种重要的补充测量手段。通过地面扫描获取目标区的三维位置点云和表面纹理信息,可实现目标区三维建模与地物识别[72]。通过配准和差分不同时期获取的TLS点云,可精确估计冰川末端的厚度变化、沟谷边坡崩滑量、沟谷边坡侵蚀量、沟谷内堆积物源体积及山谷边坡形变[65,73-76]。结合多期TLS和UAV LiDAR观测数据对冰川泥石流灾害发生前后沟谷内堆积物源体积和边坡崩滑量变化进行精细估计,有助于建立冰川流域气温、降水与泥石流规模之间的关系。但是,TLS信号易受地物遮挡,观测范围有限,且需观测人员携带设备进入泥石流沟内作业,受可达地点、海拔高度和监测环境制约较大。
2.3.2 测量机器人技术
测量机器人也称自动全站仪,可在固定站点连续观测工作模式下实现无人值守、目标自动识别、自动跟踪观测与数据处理[77]。除全自动化外,该技术比GNSS更为灵活,比TLS更具近实时观测能力,已在工程设施变形监测、边坡稳定性监测等方面得到了较广泛应用[78-80]。利用该技术固定站点的点群目标精密实时观测能力,可以实现对冰川末端、堆积物源体边缘、滑塌体、危岩等重点对象或关键特征点的位移变化进行远程自动化观测,并进行崩滑智能预警。但是,测量机器人观测范围和有效距离受冰川流域的复杂地形影响,因此需要提前锁定靶区并优化部署观测站的位置。
综上,鉴于山地冰川流域地形地貌、目标地物及与监测条件的极端复杂性与多变性,任何单一手段及常规方法均难以完成冰川流域孕灾环境及灾害的精准感知任务。亟须采用智能化技术、协同多种现代测绘遥感手段,开展基于天空地网协同的冰川流域孕灾环境与灾害智能监测方法、模式与关键技术研究。
3 天空地协同的冰川流域智能监测技术
3.1 监测内容与质量要求
冰川泥石流是冰川流域的典型地灾现象,其发生主要包含以下机制[3,11,14,33,53,81-85]:①强降雨过程中冰川发生跃动/冰崩,移动冰体对冰川下游V型沟谷两侧和底部岩土层产生削蚀作用,触发山谷两侧滑坡或垮塌,碎冰体、冰碛物、崩滑物源、沟道堆积物源组成的固体混合物在雨水和冰川融水冲刷下形成泥石流;②冰川末端大规模移动前进,冰体阻塞相邻山谷的河道,形成堰塞湖,后期冰坝溃决形成山谷洪水,进而转为泥石流;③冰川发生跃动或崩塌时,移动冰体摧毁前方冰碛湖的坝体,溃决洪水转化为泥石流;④冰川发生跃动/崩塌后,碎冰体及各种物源组成的混合物堆积在山谷中,后期雨水和冰川融水冲刷使混合物堆积体失稳,形成泥石流;⑤冰川融水和寒冻风化长期侵蚀高位陡峭山坡,在降雨或其他外力作用下陡崖崩滑,被雨水和冰川融水裹挟而从高处倾泻而下,形成泥石流;⑥冰川融水长期侵蚀沟谷边坡,在降雨或其他外力作用下边坡崩滑,形成临时冲沟拦挡坝,随着水位升高,临时坝体溃决,雨水和冰川融水裹挟着各种物源从高处倾泻而下,形成泥石流。尽管冰川泥石流的发生条件和普通泥石流一样,都需要陡峭的地形、丰富的松散固体物源和充足的水源[86],但冰川泥石流启动的降雨量阈值远低于一般降雨型泥石流[14]。此外,由于冰体对河床有铲削作用、冰川融水对高位陡坡有侵蚀作用,冰川泥石流的物质来源途径比一般降雨型泥石流更多,物源累积更快,危害更大。
冰川在跃动/崩塌之前的表面流速会明显增加,部分冰川还会有明显的局部增厚和末端前进现象,近期发生了末端跃动/崩塌的冰川,其下游的面积和厚度会显著增加[28]。因此,围绕冰川主体对象,冰川分布、冰川流速与厚度变化、冰碛湖边界等是冰川流域孕灾环境监测的基本要素。此外,冰川周围高位陡坡的稳定性、冲沟边坡的稳定性、流域内岩土体的崩滑情况、沟内物源的堆积情况等,是冰川流域孕灾环境监测的重要内容。与此相关的隐患坡体面积与形变速度、崩滑物源体积、冰碛物体积、沟内堆积物源体积变化等,也是冰川流域孕灾环境监测的基本要素。根据冰川流域监测对象的空间尺度和变化幅度,结合冰川泥石流灾害研究、过程模拟与风险分析的数据要求[32,61-62,76,87-88],本文总结了冰川流域孕灾环境与灾害的监测对象、几何要素与质量要求,见表1。
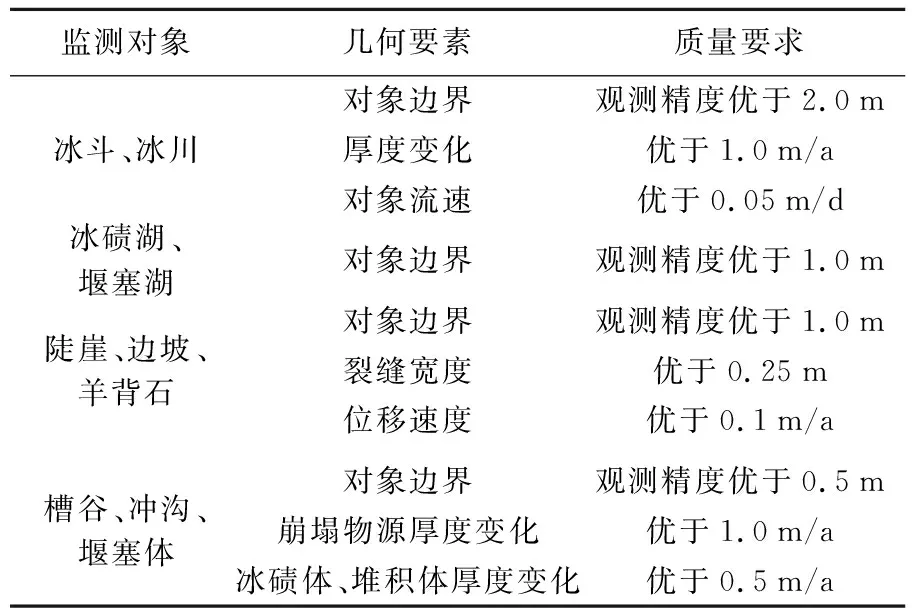
表1 冰川流域孕灾环境与灾害的监测内容与质量要求
3.2 天空地协同内涵
针对冰川流域复杂地形条件和冰川泥石流灾害的监测内容与质量要求,本文提出冰川流域孕灾环境与灾害监测的天空地协同内涵,包括平台协同、时间协同、参数协同和尺度协同4个方面。
(1)平台协同。首先,需要突破单一手段、单一平台的局限,构建基于天基平台(高分辨率SAR和光学卫星)、空基平台(UAV摄影测量、UAV LiDAR和UAV热红外)、地基平台(TLS和测量机器人)的天空地多平台立体观测体系。针对冰川流域地形条件、目标特征和监测要求,发挥各平台优势,进行点与面、高精度重点区和低精度全覆盖区的有机结合,实现对冰川流域孕灾环境与灾害监测基本要素与重要内容的全覆盖,并对各平台观测范围的重叠部分进行交叉验证与互补增强,提高时空覆盖度和观测精度。
(2)时间协同。在基于卫星遥感进行冰川流域整体观测的基础上,一方面要根据冰川流域内不同隐患区的灾害发育态势进行监测资源优化配置,以高效率、低成本、高精度监测为目标,实现重要隐患区与灾害点的连续监测和聚焦监测,近实时地获取灾害隐患态势研判与灾害链风险分析所需基础数据与关键信息;另一方面,针对重特大灾害事件与应急抢险救援行动,必要时要根据卫星过境或者UAV作业时间,采用天空,或天地,或空地,或天空地观测手段同步作业,确保多平台观测结果相互验证、及时可靠。
(3)参数协同。基于上述天空地测绘遥感手段,协同获取冰川流域关键点位、冰川边界与冰面高程信息,以及冰面正射影像、泥石流物源区三维场景、DEM、DOM、DSM、热红外影像等表观数据,进而反演冰川厚度变化、冰川边界变化、冰川表面流速变化、冰川周围高位陡坡形变、沟内边坡形变、崩滑物源体积、堆积物源体积变化、冰碛湖/堰塞湖面积变化等空间要素,以及边坡岩体风化程度、物源组成等物理要素,同步获取冰川流域关键点位的气温与降雨数据,以及流域及周边的外部环境要素(如地震活动),以便开展冰川流域灾害科学研究和灾害风险分析。
(4)尺度协同。根据不同任务需求、不同冰川流域、不同灾害现象,基于监测任务进行大尺度(如藏东南地区)、中尺度(如藏东南交通要道两侧10~20 km缓冲区)、小尺度(单一冰川流域或灾害隐患区)的冰川流域孕灾环境与灾害监测资源配置与协同方案设计,既能进行大尺度的区域孕灾环境调查与灾害隐患排查以及中尺度的危险流域与灾害隐患区锁定,又能进行小尺度的灾变过程聚焦与灾害事件应急,进而从不同时空尺度有效获取冰川流域孕灾环境的本底信息、灾变影响因素与驱动因子变化,以及灾害与灾情动态变化。
3.3 天空地协同智能监测技术模式
基于现代测绘遥感手段的天空地协同监测是全面获取和精准掌握冰川流域地形地貌、地表形变及灾害物源信息与变化态势的有效手段,但其协同监测方式与数据处理过程需要智能化,尤其需要引入相关知识(包括冰川流域形变特征、冰川泥石流形成与发育过程、冰川泥石流灾害链演化规律,以及地质岩土知识、自然地理学知识、气象水文学知识、灾害学知识等)作为4项协同的信息基础与知识引导。本文针对监测内容、难点与特殊性,提出任务驱动、知识引导和天空地协同的冰川流域孕灾环境与灾害智能监测技术模式(图2)。
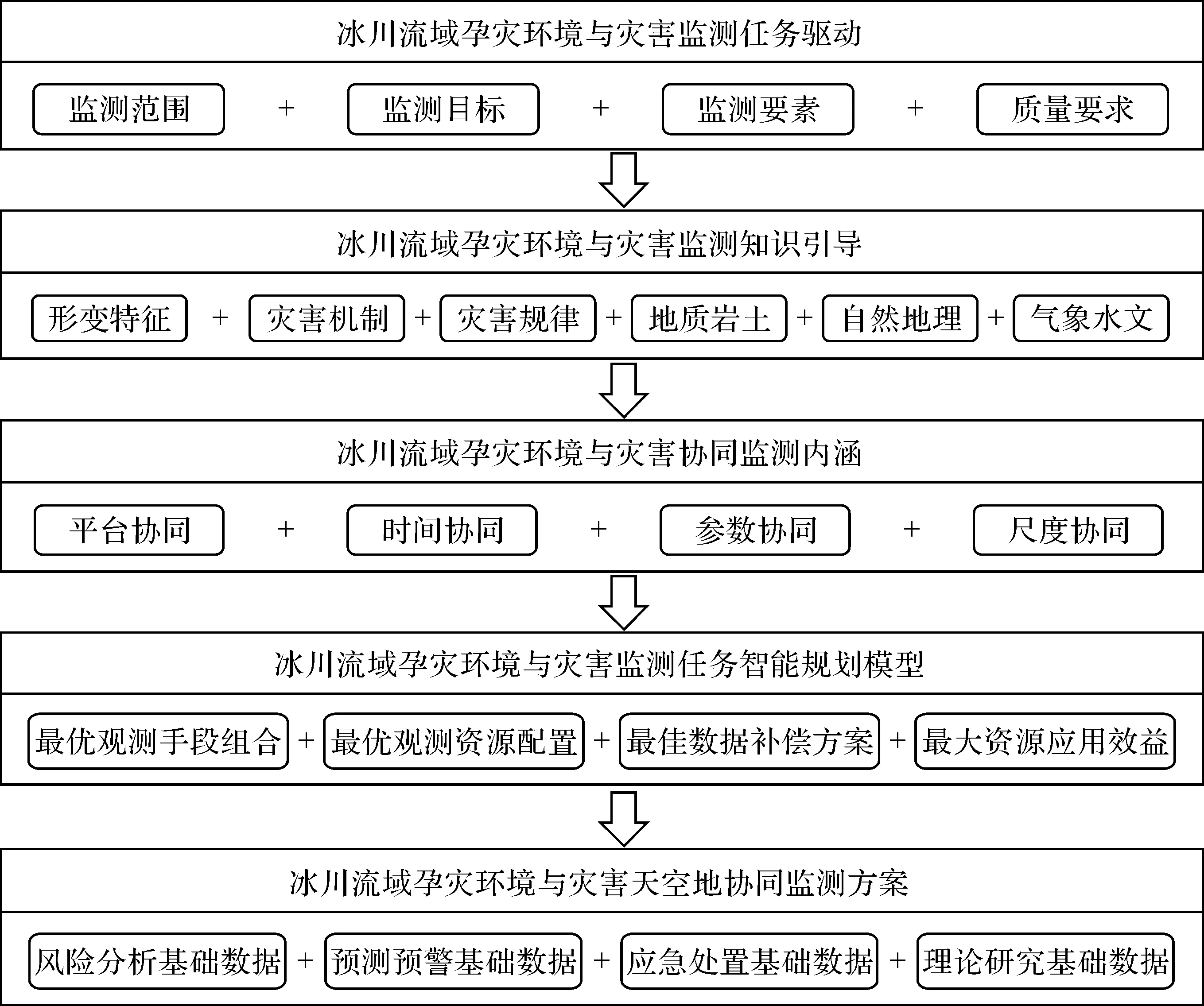
图2 冰川流域孕灾环境与灾害的天空地协同智能监测技术模式
知识引导和智能规划旨在建立科学有效的天空地协同智能监测系统。该系统应可根据具体任务需求与冰川流域观测条件,自动搭建天空地协同观测方案;进而根据观测获得的流域地形、地表形变速度、水汽分布、物源态势信息,对观测资源与协同作业模式及时进行动态优化;智能化模块指挥任务执行单元自动执行协同观测方案和动态优化,从而降低观测指挥者的决策难度,提高协同观测的科学性与观测数据的有效性。
3.4 智能监测初步方案
顾及观测区域的空间尺度与观测数据的时效性,本文将冰川流域孕灾环境与灾害智能监测任务分为3个基本类型:A类——面向单一冰川流域灾变过程情景模拟的协同观测;B类——面向冰川流域群孕灾环境差异与风险分析的协同观测;C类——面向冰川泥石流灾害事件应急响应的协同监测。针对3类基本任务,提出不同任务驱动的天空地协同智能监测初步方案:
A类监测方案:旨在精细获取单一冰川流域孕灾环境本底信息与灾变过程表观数据。顾及相关监测技术的优缺点和表1所列监测质量要求,协同监测方案为:①通过天基平台和空基平台获取冰川流域地形与地表覆盖、冰川流速与消融速度——优先采用SAR和InSAR技术获取冰川流域地形、冰川表面高程、冰面坡度、冰川消融速度,以及冰川跃动/崩塌物质体积,以光学遥感技术进行协同,采用光学遥感技术获取冰川、冰碛湖或堰塞湖面积;②通过空基平台获取冰川下游槽谷三维模型,反演冲沟长度、沟床比降、山体坡度等关键孕灾环境要素——优先使用UAV LiDAR技术,以UAV光学影像SfM三维重构技术进行协同;③通过空、地平台获取沟内冰碛物体积、崩滑物源体积、沟内堆积物源体积,判识物源组成——优先使用UAV光学影像SfM三维重构技术估计物源体积,以UAV LiDA、TLS技术进行协同,优先使用UAV光学遥感解译判识物源组成,以野外采样和地球物理勘探技术进行协同。
B类监测方案:旨在获取和分析大范围内多个冰川流域、多个灾害要素的长期变化信息。协同监测方案为:①首先,通过天基平台观测冰川和冰川湖长期动态变化——优先采用SAR和InSAR技术获取冰川流域地形、冰川表面高程、冰面坡度、冰川消融速度,以及冰川跃动/崩塌物质体积,以光学遥感技术进行协同,采用光学遥感技术获取冰川、冰碛湖或堰塞湖面积及其边界长期变化;②其次,对卫星观测结果进行综合分析,解译识别危险冰川流域与灾害隐患区;③进而,通过天基、空基平台对危险流域与隐患区进行重点监测——优先采用InSAR时序形变估计技术监测崩滑隐患区,以UAV热红外灾变体探测和UAV光学遥感影像解译进行协同。
C类监测方案:旨在冰川流域灾害发生后及时为国家及地方政府的应急救灾提供数据保障与信息支持。协同监测方案为:①通过天基和空基平台识别受灾范围、受损程度与泥石流堰塞体,确定救灾处置对象和优先级别——优先使用高分辨光学卫星影像解译技术,以高分辨SAR卫星影像解译和UAV光学影像解译技术进行协同;②通过空基、地基平台监测流域山谷中堆积物源剩余量和分布情况,以及沟谷边坡稳定性,识别灾害链及短期二次灾害风险,确保救援队伍安全——优先使用UAV光学遥感SfM三维重构技术调查山谷堆积物源剩余量和分布,以UAV LiDAR和TLS进行协同,使用UAV热红外灾变体探测技术确定崩滑隐患区,优先使用UAV光学/LiDAR DSM差分来精确估计隐患边坡的形变量,以测量机器人形变监测进行协同,识别崩滑风险;③通过天基、空基平台监测山谷冰川边界、厚度和流速变化,确定近期是否存在二次跃动可能,识别中长期二次灾害风险,为受损基础设施修护和重建提供时间节点信息参考——优先使用光学卫星遥感影像解译和跟踪冰川边界变化,以UAV光学影像解译进行协同,优先使用卫星InSAR DEM差分技术和SAR影像匹配技术估计冰川厚度变化和流速变化,以卫星光学DEM差分技术和影像匹配技术进行协同,条件允许时还可采用UAV光学/LiDAR DSM差分技术进行辅助协同。
3.5 智能化工作方向
现有的天空地协同监测方法用于复杂多变的冰川流域孕灾环境与灾害监测时,缺乏智能化技术,难以满足实际需求。需要引入地学、气象水文学和冰川灾害学知识,并结合任务需求,开发任务驱动的协同规划智能模型、数据融合处理智能方法、灾害态势分析智能技术,形成天空地协同的智能监测系统。为此,本文提出针对不同监测任务的智能化工作方向。
A类任务:以现场可达、结果精准、成本较低为准则,根据冰川流域的具体观测条件(例如海拔位置、地形地貌、云雾覆盖、人员及设备可达性)、观测目标属性(例如尺寸大小、形变速度、表面坡度和朝向、表面覆盖物、表面散射特征稳定性)、基础数据集质量(历史地形数据、存档卫星影像、可编程卫星影像)等,以时空协同、互补增强为目标,构建复合型多目标协同规划模型,设计多源融合智能算法;突破监测资源时空分配和协同模式动态优化的智能瓶颈,实现多平台、多尺度、多参数协同智能监测,保障冰川流域灾害情景模拟所需基础数据的精准获取。
B类任务:以作业便捷高效、时空覆盖度高、总体成本低为准测,结合区域地理地貌、地质水文及气象学知识,构建边际效益最大化协同规划模型;根据冰川流域群孕灾环境的共性特征与个体差异、冰川泥石流灾害隐患区的空间分布与发育特征等,对有限的时间、人力、和观测资源进行时空智能分配,实现各类观测资源的应用效益最大化,保障冰川流域群孕灾环境差异分析与风险识别所需基础数据的全面获取。
C类任务:以监测及时、要素完备为准则,结合灾害发生和灾害链时空演化知识,构建时效性最佳的协同规划模型,设计相应的智能算法;根据灾害点观测条件、观测目标属性、基础数据集等,智能分配效率最优的传感器和效果最佳的监测模式,对灾情评估与灾害态势研判亟需的空间信息和关键要素进行近实时、全覆盖、高精度监测,保障灾情研判与抢险救灾所需关键数据的聚焦获取。
4 结论与展望
冰川流域地形险峻、地表覆盖复杂,冰川泥石流灾害危害大、致灾因素多。冰川流域孕灾环境与灾害的智能监测需求迫切,对观测数据的点面融合、时空互补、参数增强和精度提升的要求远高于地质滑坡和露天矿边坡。充分发挥现代测绘遥感技术的各项优势及其协同能力,构建冰川流域孕灾环境与灾害的天空地协同智能监测技术体系,具有挑战性与前瞻性。天空地协同监测资源的优化配置、观测工作的任务驱动、规划模型的自动生成、监测数据的信息融合、灾害演化的态势研判等,均是智能化的重要方向。亟须面向冰川流域的不同监测任务,研发相应的天空地协同智能规划模型、设计智能算法、开发智能平台,以满足防灾减灾、应急保障和科学研究的重大需求。
在气候暖湿化背景下,藏东南交通要道面临冰川灾害严重威胁。围绕平台协同、时空协同、参数协同、尺度协同开展藏东南冰川流域孕灾环境及冰川泥石流灾害隐患区智能监测研究,具有典型性与代表性。整合可用的卫星遥感、UAV遥感和地基观测资源,构建天空地协同的智能监测技术体系,实现冰川流域孕灾环境、变化态势与灾害事件智能监测,是获取藏东南减灾防灾、风险分析和应急处置所需空间基础信息数据的必由之路。随着质量更好、分辨率更高的卫星数据越来越丰富,功能更强、性价比更优的现代测绘仪器(如UAV-SAR)的不断涌现,新数据新设备必将在冰川流域孕灾环境与灾害观测中有用武之地。本文提出的方法与模式也将与时俱进,不断修正和完善。
猜你喜欢
中国地质调查(2022年6期)2023-01-17
水土保持研究(2020年1期)2020-04-27
小天使·四年级语数英综合(2020年2期)2020-02-04
创新作文(1-2年级)(2019年2期)2019-08-06
安全与环境工程(2019年3期)2019-06-24
中国地质灾害与防治学报(2018年1期)2018-08-02
金色少年(奇趣科普)(2017年12期)2017-12-26
绿色科技(2015年8期)2015-07-18
应用海洋学学报(2014年1期)2014-11-22
石油化工应用(2014年6期)2014-03-11