
多翼无人机自动避障技术在输电线路巡检中的应用
2021-08-26 08:14:04王振华郭方勇朱敏杰
通信电源技术 2021年8期
王振华,周 云,郭方勇,朱敏杰
(深圳供电局有限公司输电管理所,广东 深圳 518000)
0 引 言
近些年来,随着国家经济建设快速发展,电力需求旺盛。结合国家能源战略部署、西电东输项目投入运营以及超、特高压输电线路应用,国家大电网格局基本实现。但是,我国幅员辽阔,地形气候复杂多变,自然灾害频发,再加上动植物、飞鸟侵入,自然极端天气影响,人为因素干扰,输电线路距离长、分散性大、难以维护等因素的存在,给电网安全运行带来诸多隐患。因此,需要利用无线网络通信技术、无人机技术以及图像处理和卫星定位等先进智能技术,定期巡查输电线路及电网周边环境,开展线路日常维护,排除各种隐患,及时掌握输电线路动态信息,保障国家经济建设及人民日常生活稳定。
利用无人机对高压输电线巡检,解决了人工巡检盲区问题,而且效率和巡检质量极高,安全性较强。无人机通过携带的定位设备、拍照设备以及多种无线传感器设备等,可以精准定位出隐患或故障位置,并利用自动避障技术解决了发生碰撞等事故的情况,安全度极高[1-4]。操作人员利用可视化系统和无线遥控装置能够及时掌握无人机的飞行轨迹、飞行状态、巡检拍照、各种数据采集及状态监测,实现了远程控制和输电线路巡线环境的重建,规范了输电线路巡检标准,拓宽了巡检内容和范围。
1 无人机自主避障技术系统设计方案
1.1 无人机自主避障设计思路
多旋翼无人机技术目前相对成熟,其结构设计轻巧,飞行控制系统稳定,操控性好、起降便利,便于运输、携带,能够高速机动飞行且可空中悬停,因此在输电线路巡检应用较为广泛。多翼无人机携带的微型影像采集及图像识别系统,可对飞行路线进行有效规划,自动避开障碍物,巡检安全性能较高[5]。而且电磁抗干扰性强,操作人员采用航模遥控器,控制信号频率为2.4 GHz,消除了图像传输信号频率(5.8 GHz)的干扰影响。此外,无人机安装有同频率S-BUS接收机,接收机接收遥控器控制信号后传送给避障系统,避障系统通过传感器自动测量计算出无人机与故障物间的精准距离,对遥控器信号进行重构后,传送到飞行稳定控制模块,从而实现了无人机的精准避障功能。无人机避障技术主要采用超声波、TOF、智能图像识别处理以及测距识别技术等,通过云平台系统实现测距、定位以及轨迹规划等功能[6]。
1.2 自主避障功能实现
多翼无人机自动避障系统通过测距传感器采集测距数据,云平台对采集的控制信号和测距信号进行综合处理。无人机通过舵机接收到地面遥控信号后激发出相同的一个周期为20 ms左右,宽度为1~2 ms的负向中位脉冲信号。两个脉冲信号经过云平台处理,获得一个差值脉冲信号,云平台判断差值脉冲的正向或负向性后传输给遥控器。控制驱动系统飞行轨迹。云台选择多选择控制精度高、反应灵敏以及稳定性好的设备,确保恶劣及复杂环境下无人机的稳定性和安全性[7]。
云平台在处理过程中综合运用威胁场、动力学约束状态,根据巡检线路进行几何建模,对输电线路无人机巡检兴趣点和威胁场进行三维建模。无人机巡检作业时,根据GIS地理信息库信息设置好输电线路杆塔信息库后,多翼无人机利用机载摄像机、超声波传感器将实时数据传输到操作视频界面。无人机巡检避障模型如图1所示。
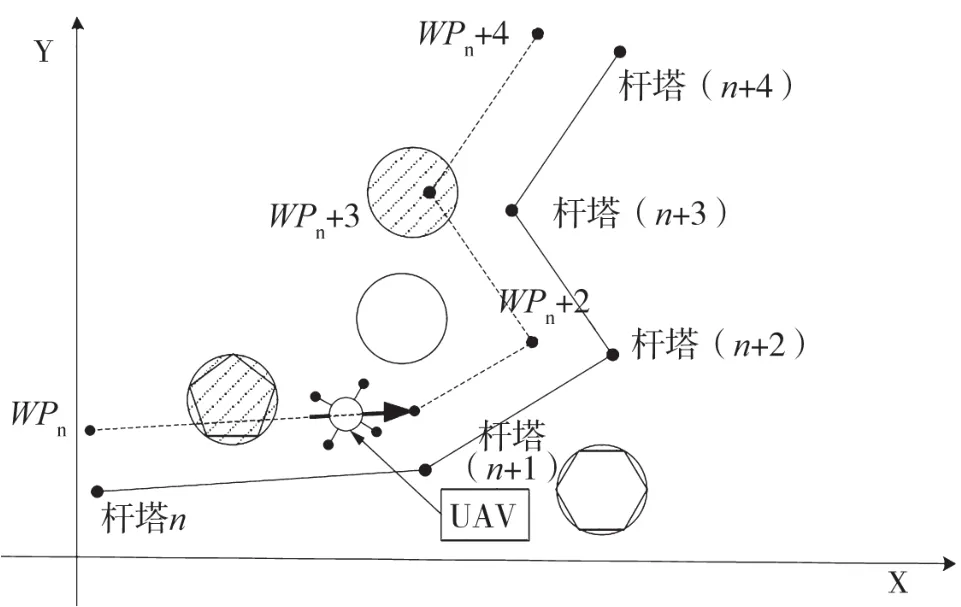
图1 无人机巡检避障模型
图1中,X,Y表示经度和纬度坐标,实线表示待巡检高压输电线路,小圆点表示巡检线路中杆塔等标的物结点,圆形阴影区域则表示为障碍物或者称为威胁场,虚线则为避障系统为无人机规划的实际飞行预期航迹。巡检线路三维模型视图中,杆塔多简化成圆锥体,顶端的“导线”进行杆塔的连接。图中的圆柱体用于标识障碍物,无人机飞行过程中需要保障其安全性,为实现这一目的需要在三维模型中实现无人机飞行轨迹的规划,有效规避威胁场。
2 硬件设计实现
2.1 电源模块
Arduino UNO控制板作为超声波传感器及遥控器接收机的信息存储单元,为了减少外界信息的干扰,采用外部独立电源供电,图2为系统供电模块原理图,Vin为电源输入端口,允许输入电压范围为5~10 V,A4端连接二极管,其单向导通的特性有效避免了系统元器件因电源极性接反而被烧毁的问题。
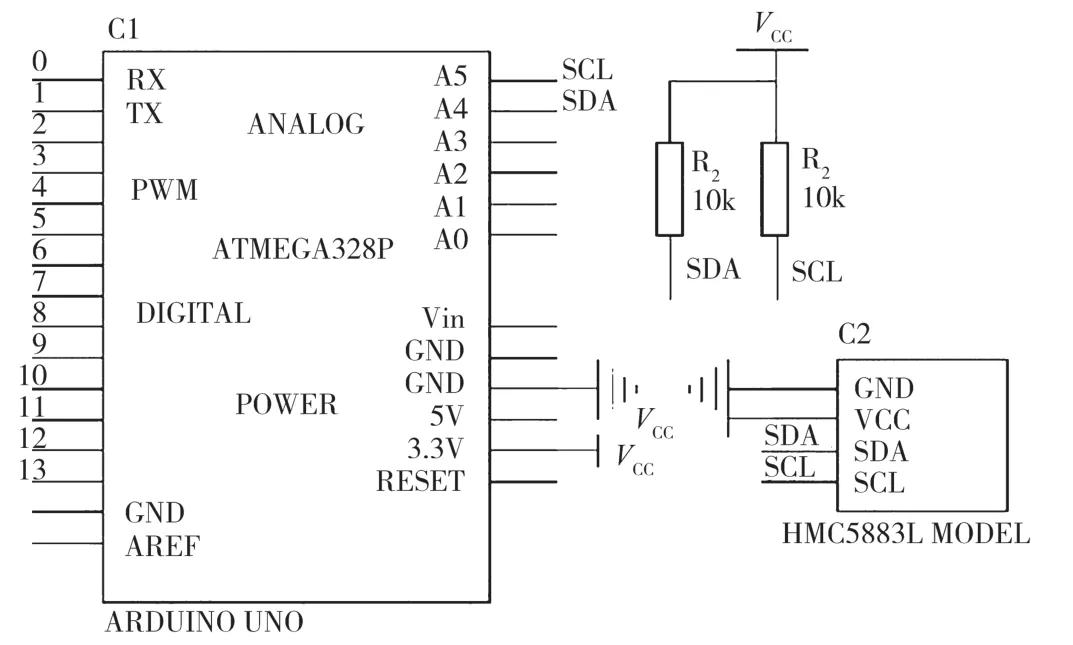
图2 电源模块图
2.2 超声波传感器选型
综合分析超声波传感器测距范围、测量精度及其质量、体积与无人机负荷能力相适配等问题,选取尺寸、重量适中,测量范围较大、精度较高型号为US100-Y401的超声波测距传感器,如图3所示。
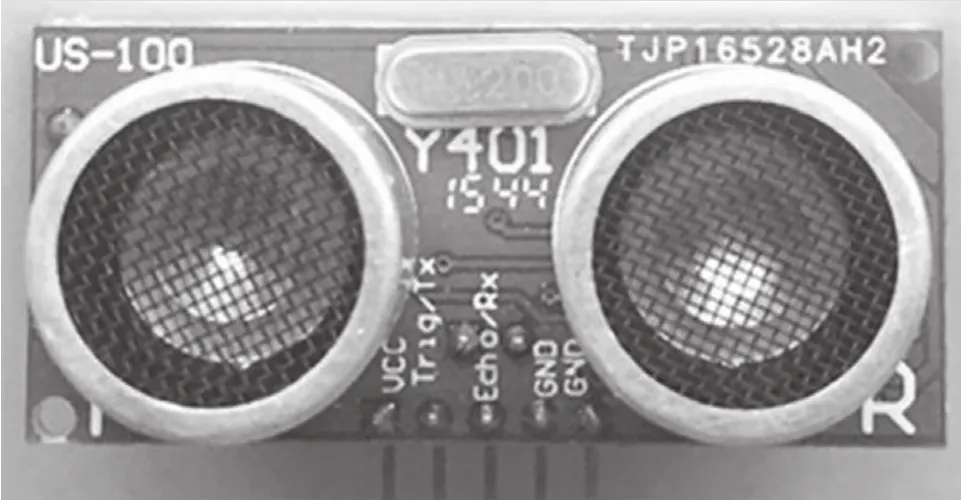
图3 US100-Y401 的超声波测距传感器
3 软件设计实现
无人机软件控制流程如图4所示。云台控制中心接收遥控器接收机的信号后,及时对超声波传感器采集的距离信号进行综合处理和判断,制定出三维模型,标识出巡检路线中的障碍物和兴趣点,规划出飞行轨迹。
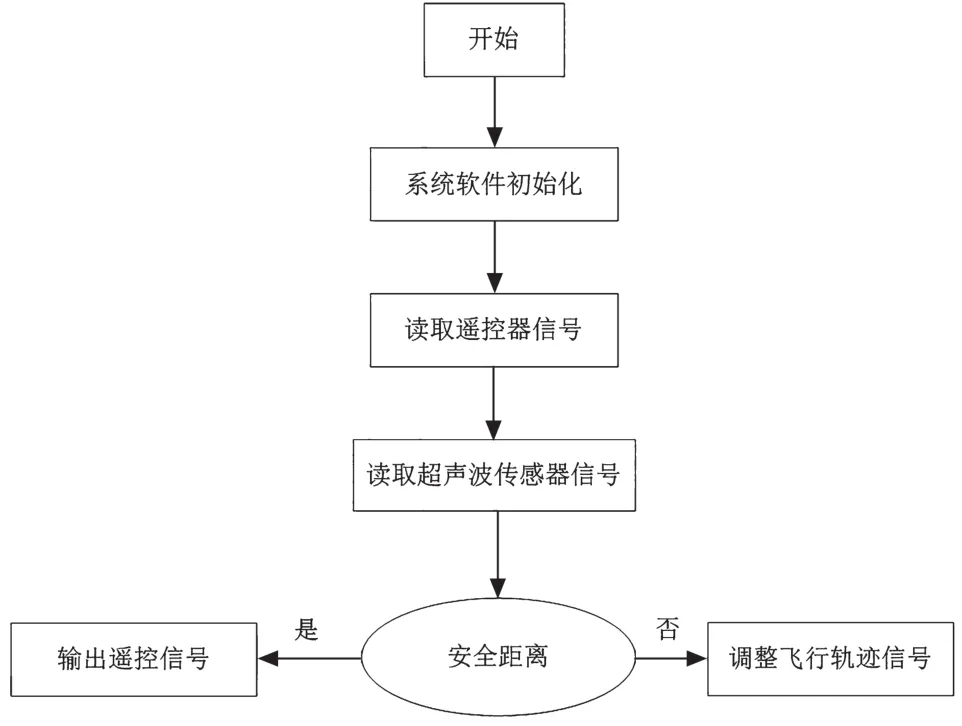
图4 软件流程图
4 无人机航路智能规划算法
为实现多翼无人机的功能,需要要在系统当中引入智能规划算法,常用的算法包括几何算法、粒子群算法、遗传算法、模糊控制神经网络以及蚁群算法等。本文采用BP神经网络算法来实现避障功能。BP神经网络算法在无人机航路智能规划中的应用可很好实现无人机最大转弯半径、线路巡检距离测算、规避障碍物等功能,利用算法获得无人机飞行航路离散点阵。多旋翼无人机对输电线路巡检时,通过机载云平台和摄像机获取输电线路中的兴趣点,同时有效规避各种障碍物,进行输电线路飞行轨迹规划,对输电线路路径进行巡检跟踪。多旋翼无人机与输电线路需要保持一定距离巡航,同时控制好飞行姿态[8]。
高压输电线路在GIS地理信息库中具有固定的经纬度坐标,神经网络算法可以简化神经网络层数,大大提高了算法效率。BP神经网络算法采用最小均方差准则,实现指标权重和误差修正。BP算法可以在MATLAB软件中进行编码,利用软件库进行仿真[9]。
BP学习训练后,巡检无人机能够有效避开巡检线路中的障碍物。对于误差修正,第一个杆塔处航路点误差为-5×10-5,后续误差较小[10]。通过仿真能够发现,BP神经网络算法应用效果很好,基于此算法能够得到极高的固定高度高压输电线路巡检准确率。
5 结 论
无人机技术目前较为成熟,多翼无人机运用到高压线路巡检中解决了人工巡检存在的诸多困难,而且巡检效率和巡检质量高、安全性好且成本较低。本文结合无人机特点,对自动避障技术进行分析和研究,通过应用测距传感器和机载云平台技术以及BP神经网络算法,很好地实现了软件仿真功能。并通过三维模型,利用可视化系统,实现了障碍物标识和飞行轨迹规划,确保巡检任务有效完成。随着5G移动通信技术及大数据和云计算的应用,无人机在高压线路巡检过程的应用性能更加稳定,效果更好。
猜你喜欢
作文大王·低年级(2020年9期)2020-10-12 02:41:03
作文大王·低年级(2020年9期)2020-10-12 02:41:03
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
科学(2020年3期)2020-01-06 04:02:51
知识就是力量(2019年12期)2019-01-14 02:52:47
电子制作(2017年7期)2017-06-05 09:36:13
人生与伴侣·共同关注(2015年22期)2015-05-30 10:48:04
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
