
基于LoRa传输的地灾监测数采系统设计与研究
2021-08-26 03:29刘懿俊
物联网技术 2021年8期
刘懿俊
(深圳市地质局,广东 深圳 518023)
0 引 言
我国地质环境复杂,地质活动频繁,崩塌、滑坡、泥石流等地质灾害频发,受其影响和威胁的人口众多。为最大限度保障人民群众生命财产安全,提供完善的地质灾害监测(地灾监测)预警系统至关重要[1-2]。地灾监测具有多种方式,包括无人机、传感器以及卫星监测等,其中传感器数据采集系统具有全时监测、低成本以及高效传输等优势[3-4]。
数采系统应用广泛,针对不同应用需求,可以有针对性的进行设计。对于需求简单、环境友好的单一应用场景数采系统设计简单,易于实现,性能稳定。然而,地灾监测严苛的工作环境导致其对数采系统提出了诸多严苛的设计要求:采样频率多样性、数采系统孤立性、系统故障冗余性等[5-6]。Semtech公司发布的基于1 GHz以下的超长距、低功耗新型数据传输技术Long Range Radio(LoRa),其接收灵敏度达-148 dBm,可确保网络连接的可靠性。LoRa技术在极大改善数据接收灵敏度的同时,降低了功耗。其支持多信道多数据并行处理,系统容量大,支持测距和定位[7]。LoRa技术已被广泛应用于控制系统以及实验室设备监测等领域的数据采集与监测[8-10]。
本文以LoRa多频段网关节点为基础,进行地灾监测数采系统设计,在满足地灾监测严苛的环境要求以及复杂的数据采集需求下,实现系统的长时间稳定运行。
1 地灾监测数采需求
1.1 采样频率多样性
地灾监测系统以一定面积的监测区域为测量单位:每个测量单位内部的不同地点具有不同的监测传感器,用以监测不同的物理信息;同一传感器在不同地质环境条件下具有不同的监测方式。不同的传感器和不同的监测模式要求数采系统具有多种采样频率,并可根据环境条件的变化实时改变采样频率。
1.2 数采系统孤立性
地灾监测系统的监测环境多为无人区,不具备便利的交通条件与通信条件,监测环境导致数采系统孤立,为系统维护、信息通信、能源供应带来了严峻的挑战。
1.3 系统故障冗余性
地灾监测系统具有3~5年的工作周期,监测周期内不具备人工修检条件;一旦发生地质灾害,监测系统必会受到影响。因此数采系统必须具备良好的冗余性,保证在一般故障条件下仍能正常运转。
2 数采系统设计
2.1 顶层数采架构
地灾监测数采系统需要在广阔的采集区域中对大量监测点进行信号采集。大量的数据采集工作仅由一个上位机进行监控具有较大的难度,同时,信息拥堵对传输效率的影响将大大增加。为实现对监测数据进行高度同步的实时采集,需建立多层级数采处理架构,数采架构为服务器-局域网关-节点-传感器。网关节点通信设计如图1所示。

图1 网关节点通信设计
(1)服务器一级数采总机;
(2)服务器下设N(N>2)个局域网关;
(3)每个局域网关同时负责M(M≥30)个节点的控制与数据传输工作;
(4)每个节点负责P(P≥4)个传感器(监测点)的供电控制与数据采集等工作。
在常态工作(非地灾状态)下,节点首先对传感器数据进行采集与预处理,以低传输数据率向局域网关传送数据。局域网关对下属所有节点数据同样以低数据传输速率向总机传送数据。服务器总机面向N个局域网关进行数据采集并存储记录,此时总服务器与各局域网关仅消耗了较小的通信带宽就实现了对监测环境的低频全局监测。
在警戒工作(局部地灾状态)下,当局部地区发生明显地灾变化时,节点对数据进行本地处理与分析。节点判断异常地质状态后进行实时高速率数据传输,局域网关以相同速率输送数据。服务器和局域网关的部分带宽用于其他节点的常态监测,部分带宽用于非常态节点的数据监测,实现对局部地区的高频实时监测。
在额定工况(全局地灾状态)下,当所有地区发生明显地灾变化时,那么所有节点将进行全速率数据输送。由于局域网关与服务器带宽有限,所有数据需降速传输,系统可以实现全局中频实时监测。
不同工作状态下各节点数据传输率见表1所列。

表1 不同工作状态下各节点数据传输率
2.2 LoRa多频传输设计
通过数采架构设计可知,系统会同时存在常态低频监测、局部高频监测、全局中频监测等三种监测模式。
多频段设计的重点在于防止信号之间的干扰以及数据传输造成的拥堵,根据地灾监测需求,设计LoRa双频数据传输系统,包括高速、中速和低速频段,3种频段的数采频率分别为0.2 s/次、2 s/次和200 s/次。LoRa多频段设计可以灵活地为同一局域网内的不同地灾监测场景使用不同频段,进行独立的传输加密设计,在防止信号互相干扰的同时,有效避免信号传输的拥堵,保证数据传输的高效稳定。
采样速率可通过上位机进行人工主动控制,实现某一节点的主动实时监测;也可通过节点对监测场景进行判断,通过自动控制算法实时改变。
(1)监测的单位窗口时间内地质运动频繁,节点自主将采样速率调整为高速频段;当监测的单位窗口时间内地质运动较弱时,节点自主调整为低速频段。
(2)局域网关在带宽允许的条件下,向服务器进行高速数据传输。下设节点高速传输较多时,对节点传输数据进行间隔采集,使数据降速传输至服务器,避免数据拥堵。
LoRa多频监测控制与设计如图2所示。
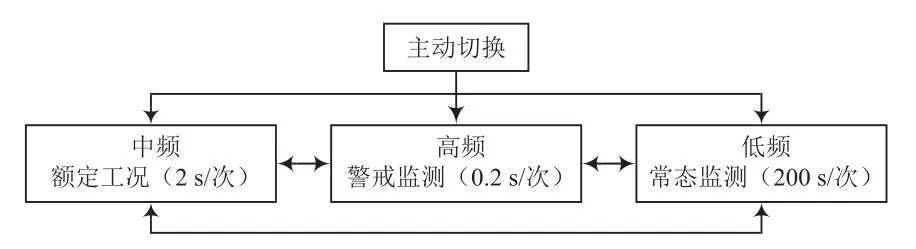
图2 LoRa多频监测控制与设计
2.3 故障监测与诊断
地灾监测系统需通过传感器信号的变化对环境的变化进行实时监测与判断。但传感器信号发生变化,不仅仅是由于地灾变化导致。传感器出现信号突变的主要情况如下:
(1)正常模式:传感器监测信号突变,正常监测到地灾变化,交送数据于上层节点;
(2)故障模式:无外力干扰情况下,传感器发生故障,信号突变或无信号;
(3)损坏模式:无外力干扰情况下,传感器硬件损坏,信号突变或无信号;
(4)破坏模式:地灾变化,外力导致传感器发生故障,信号突变或无信号;
(5)断网模式:节点或局域网故障,数据传输失败。
在模式(2)和模式(5)情况下,可以通过故障诊断算法或重启进行恢复;在模式(3)和模式(4)情况下,由于传感器硬件损坏,因此无法进行系统自我恢复。故上层服务器接收到故障信号后,需通过进一步的监测与控制,判断传感器提供的突变信号的实际信息与意义,以便监测系统正确响应。故障监测与诊断流程如图3所示。
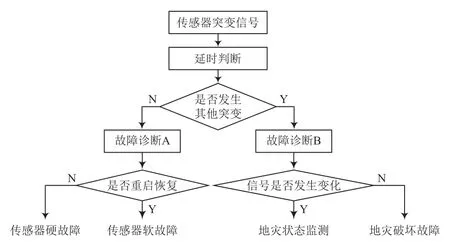
图3 故障监测与诊断流程
(1)接收到1个传感器的突变信号后,等待延时,判断是否有其他传感器存在信号突变;
(2)未接收到第二个突变信号,判断监测环境未发生地灾变化,则启动故障诊断子程序-A。
(3)接收到第二个突变信号后,判断监测环境发生地灾变化,节点及上层局域网开启高频采集模式,同时启动故障诊断子程序-B。
故障判断子程序-A重启传感器后,重新进行数据抓取,若数据仍未回复,则判断传感器硬件故障;若数据回复,则判断传感器软件故障。故障判断子程序-B监测传感器信号是否实时变化,无变化则判断为受外界地灾环境影响导致传感器硬件损坏,发出故障信号。
3 系统设计与实验
图4所示为LoRa节点控制盒内部电路,所设计节点能够作为一个单节点网关正常工作,具备4G模块和GPS扩展能力。节点模块同时负责所监测区域的三轴倾角传感器、三轴振动传感器、温度传感器,确保所有传感器的电源正常供电,数据采集工作正常开展。

图4 节点控制电路
3.1 TCP连接压力实验
所有网关同时通过TCP向服务器发送数据,测试数据通信能力与承压能力。通过TCP心跳模式定时发送小数据包,每5 s发送1次确认信号,检测TCP连接是否正常,并验证数据传输故障的回复能力。进行3次长时不间断通信实验,压力测试结果见表2所列。

表2 压力测试结果
(1)一次实验不进行其他操作,仅进行144 h的不间断通信测试,发现系统未出现故障。
(2)二次实验,进行24 h不间断测试,人为干预通信模块信号强度、电力供应(降低信号强度与电力供应)。通信对应出现4次故障,通过故障诊断与控制,系统重启并正常运行4次。
(3)三次实验,进行24 h不间断测试,人为改变IP地址2次,通过故障诊断与控制,系统重启并正常运行2次。
通过测试,TCP连接与传输在硬件未完全失效的条件下,系统可以长时间正常运行,并在一般故障条件下可自动重启恢复通信。
3.2 数据读取实验
数据采集程序会对每一个位置的传感器进行连续5次读数,3次以上读数正常时,才会返回读取值,否则系统报错重启。数据读取实验见表3所列。
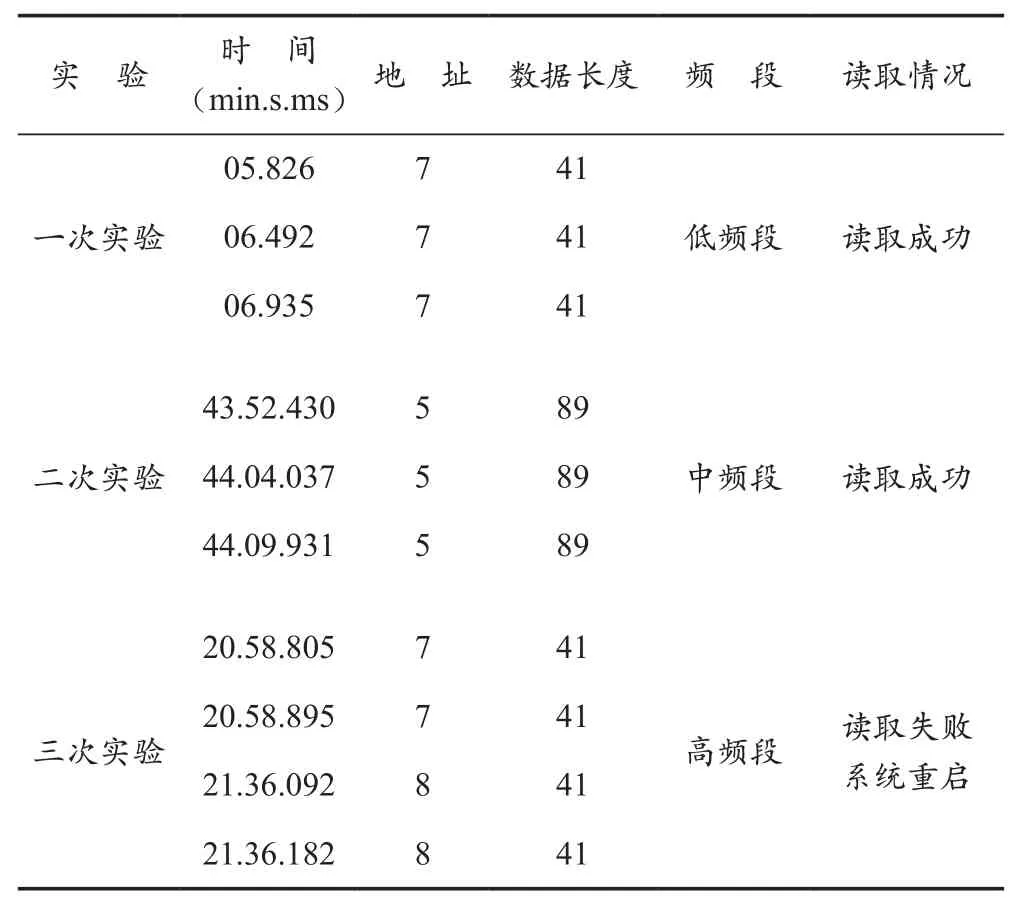
表3 数据读取实验
对数据读取进行压力测试。一次、二次实验分别进行低频段、中频段数据传输测试,无外界干扰条件下,系统正常进行数采工作。三次实验进行高频段采集,并人为短时间切断传感器数据传输,系统数采出现错误,未能正确读数,系统自动重启后重新开始数采工作。因此,在无外界影响硬件系统的条件下,数采系统可以进行高质量的数据传输。
3.3 GPS通信实验
实验中对GPS信号进行采集,对数采系统的定位可行性进行实验验证。实验中,北斗卫星搜索信号更强,卫星数量更多,定位性能明显优于GPS系统。因此在数采系统运行时,优先采用北斗系统,GPS系统作为备份。实验接收卫星信号平均值见表4所列。

表4 实验接收卫星信号平均值
(1)第一次实验未对系统进行任何人工干预,系统正常工作,无信号中断情况。
(2)第二次实验对系统降压供电,系统CPU虽然能够正常工作,但GPS芯片由于电压不足而停止工作,发生一次中断。系统重启后正常运行。
(3)人为弯折GPS信号接收线,信号中断。
由此可知,数采系统在无外界干扰影响系统硬件时,可以实现对GPS信号的长时稳定收发。天线与GPS模块之间的馈线不能出现弯折,GPS模块必须固定,避免天线故障对监测系统造成影响。
3.4 LoRa网关与节点协同压力测试
在开阔地带对LoRa网关与节点进行协同压力测试,所有节点进行高频数据发送,测试单网关系统与多网关系统下,服务器接收数据的情况。
(1)通信距离不小于1 km,采用30个节点对单网关系统进行压力测试。网关吞吐量不超过20%,丢包率小于5%,并能稳定重传。
(2)在同一地点,现场架设60个节点和3个网关,测试距离保证在3 km以上:在数据吞吐量不超过理论值20%的情况下,各子网均能够正常独立通信,丢包率小于2%。
(3)在以上系统压力测试中,对任意一组网关、节点进行掉电操作,30 min后重新上电,系统均可恢复正常。在所有调试与实验中,节点模组休眠电流均小于2 μA。
网关节点协同压力调试见表5所列。

表5 网关节点协同压力调试
5 结 语
通过测试,TCP连接与传输、数据传输工作、GPS信号收发工作在硬件未完全失效的条件下,系统可以长时间正常运行,并在一般故障条件下可自动重启恢复通信。服务器可对节点进行多参数切换控制,节点能够正常上线并回复。在不超过LoRa网关标称负荷的情况下,对节点进行数据传输压力试验,所有数据均能稳定到达服务器。实验中,网关能够稳定检测传送数据是否出错,并通知节点重传。该设计经济、高效、稳定,高度集成了北斗定位等多种辅助功能,适用于大规模的地灾监测。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
铁道通信信号(2020年2期)2020-09-21
电子制作(2019年22期)2020-01-14
电子制作(2019年16期)2019-09-27
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
电子制作(2017年17期)2017-12-18
电子制作(2017年8期)2017-06-05
太阳能(2015年7期)2015-04-12
组合机床与自动化加工技术(2014年9期)2014-03-01
