一种高效VIENNA整流器断续调制方法
2021-08-25 08:43李伦全杨奕帆李佳窈刘斌李小文
电气传动 2021年16期
李伦全,杨奕帆,李佳窈,刘斌,李小文
(1.深圳市高益智能电气有限公司,广东 深圳 518101;2.南昌航空大学 信息工程学院,江西 南昌 330063;3.国网南昌市昌北供电公司,江西 南昌 330063)
VIENNA整流器是一种中点钳位式三电平整流器拓扑[1],其具有开关器件少、能实现稳压和输入功率因数校正等优点,近年得到了广泛的应用[2]。
针对VIENNA整流器,文献[3]研究实现了三电平等效为两电平的转化,故可以使用两电平扇区的判断方法,以及相关矢量的作用时间计算方式。文献[4]将其他扇区的参考矢量统一转化到第1扇区,提高了运算速度。文献[5]提出了一种可直接实现VIENNA整流器空间矢量脉宽调制(space vector pulse width modulation,SVPWM)的数学优化方法,并进行了验证。VIENNA整流器的控制方法以及调制方式有较好的研究价值,随着功率器件开关频率的不断增加,开关损耗对系统效率的影响也增大,通过优化调制技术可以降低整体开关频率。
针对大功率并网逆变,文献[6]提出一种混合断续PWM调制策略,能有效控制中点电位平衡,而两种调制算法的切换采用滞环方式,并减小切换造成的额外开关动作,提升了系统效率。为降低开关损耗,文献[7]提出一种三电平断续脉宽调制策略,进而提出一种基于载波思想的实现方法,有利于提高芯片计算的运行效率。VIENNA整流器输出正或负电压时,与当前时刻的电感电流方向有关,相较于一般全控型逆变或功率因数校正(power factor correction,PFC)系统的断续调制,多了一个隐含的约束条件。文献[8]首先对VIENNA整流器提出无差拍控制器,并将输出送到不连续脉宽调制(discontinuous pulse-width modulator,DPWM)中,实现系统的断续调制,但该文对断续调制与输出电流的关系,以及中点电位平衡的具体实现办法等问题,尚未进行深入讨论。相关的研究还可参考文献[9-10]。
本文在介绍了VIEENA整流器模型及控制器设计的基础上,提出一种新型的断续调制算法。一方面,结合整流器各相电流符号,研究能在若干分区内实现最大电流相开关不动作;另一方面,该调制算法也对如何进行中点电位控制进行了分析,通过在无法实现最大电流相开关不动作的小区中,引入一个角度控制量,在该角度范围内进行中点电位控制,而在该角度之外,也实现某相的开关不动作,尽量提升系统效率。最后通过仿真和实验对所提调制算法和控制器进行了验证。
1 三相三线VIENNA拓扑及空间矢量分布
1.1 主电路拓扑及模型
三相三线VIENNA主电路拓扑如图1所示,不失一般性,假设三相电压对称。图1中A,B,C三相电网相电压的值为eA,eB,eC,三相电流为iA,iB,iC;D1~D6为整流二极管,Q1/Q2,Q3/Q4,Q5/Q6分别为A,B,C三相的反向串联开关管,这3对开关管的驱动为SA,SB,SC;直流母线电压的值为Udc;直流母线电容由C1和C2串联构成;i1为二极管D1/D2/D3的总电流;i2为二极管D4/D5/D6的总电流。设电感L1,L2,L3的值相等,都为L;C1和C2的值都为C;负载电阻为R0。
根据图1可列出电流方程如下:
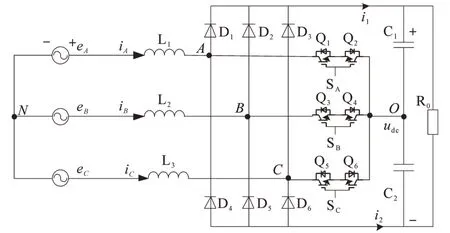
图1 三相三线VIENNA主电路拓扑Fig.1 Three-phase three-wire VIENNA main circuit topology
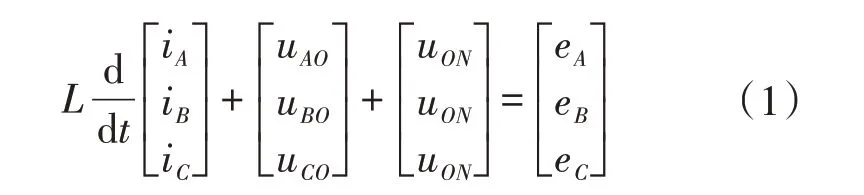
式中:uAO为A点到O点的电压,其余变量类似。
进行dq变换有:

式中:id,iq和ud,uq分别为三相电流和电压在旋转坐标系下的变量。
列出电压方程如下[11]:
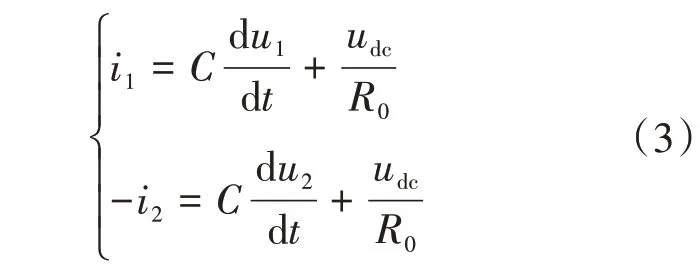
式中:u1,u2为上、下电容的电压值。
进行dq变换得:

基于系统模型的控制器设计可参考文献[11]等。
1.2 三电平空间矢量分布以及连续调制
令X表示A,B,C中的任意一相,当SX=1时对应相的反向串联开关管处于开通的状态,此时对应相的桥臂电压uXO=0;当SX=0时,对应相的反向串联开关管处于关断的状态,此时该桥臂输出电压取决于该相电流方向,当iX>0,uXO=udc/2,当iX<0,uXO=-udc/2。所以对于此系统,由于三相不同的开关组合可以得到27种电压组合,或者19种不同矢量(其中包含大、中、小、零矢量,共4类)。
VIENNA整流器的空间电压矢量[3]分布如图2所示。
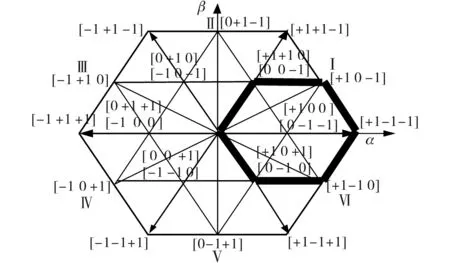
图2 VIENNA整流器电压矢量Fig.2 The voltage sector of the VIENNA rectifier
上述空间矢量图中,可以以0°角或α正轴为起点,以π/3为步长,划分出6个扇区。
表1列出了图2中粗实线所围区域内的电压矢量组合,其中三相驱动组合011和100分别对应小矢量[+1 0 0]和[0-1-1],用来调节中点电位。
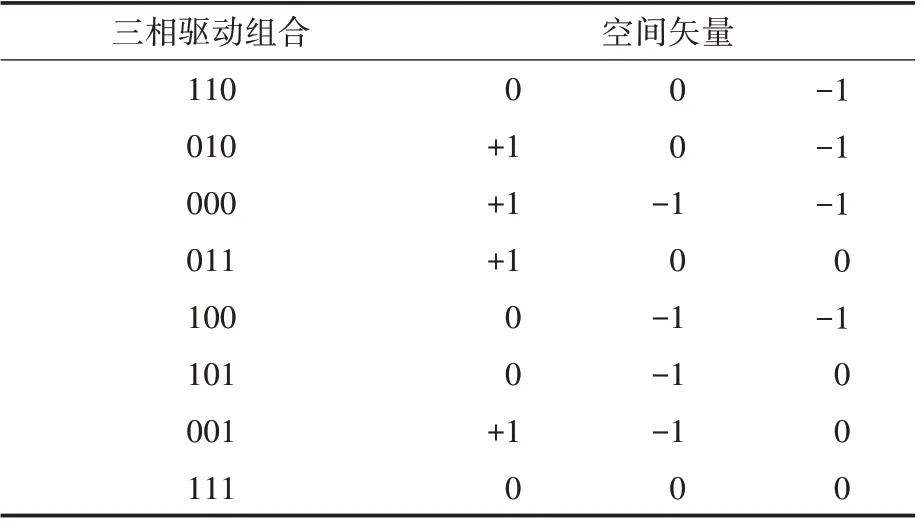
表1 粗实线所围区域内三相驱动组合和开关组合对照表Tab.1 Comparison table of three-phase drive combination and switch combination in the area enclosed by the thick solid line
传统的七段式SVPWM基本矢量作用顺序的分配原则是:在尽可能减少开关次数的条件下去降低PWM的谐波分量,所以在每次动作开关的时候,只改变其中一相的开关状态,并且对零矢量进行时间上的平均分配,使之能产生对称的PWM。通过对矢量的平移与两电平SVM等效,再使用两电平SVM的计算方式获得三电平有效矢量的作用时间,最后得到两电平扇区的矢量[3]。
考虑到VIENNA整流器各桥臂输出电压同该相电流有关(例如,当某相为正电流时,该相对应桥臂输出电压只有正或零电压),故可根据电流方向组合将图2划分出不同的区间,如图3所示。
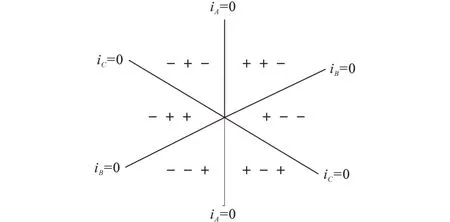
图3 以电流方向划分电压矢量空间Fig.3 Divide the voltage sector space by current direction
1.3 VIENNA整流器的中点平衡问题分析
在对直流侧中点电位平衡控制的研究中,常用方法是:由于小矢量对中点电位的作用相反,因此可以通过调整这2个矢量的相对时间来控制中点电位,对具体算法已有一些研究成果可供参考[12-13],此处不再赘述。
2 三电平VIENNA整流器的断续调制
为提升系统效率,降低开关损耗,进一步研究VIENNA整流器的断续调制。
2.1 VIENNA整流器断续调制及中点电位控制
VIENNA整流器的断续调制与普通电平的调制类似,其断续调制要求在某一扇区内,A/B/C中的某一相保持开关状态不变。但与普通的三相全桥有所不同的是,各相的工作状态也有赖于当前时刻的电流方向,因此对断续调制的矢量选择形成了约束,这一点下文还将继续讨论。

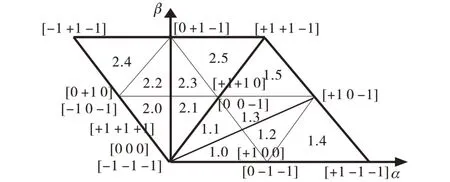
图4 第1和第2扇区Fig.4 The first and second sectors
根据各小区的矢量序列,设定某一相开关状态不变,不失一般性,得到第2扇区的断续调制开关组合方式如表2所示。
表2 断续式调制第2扇区的2种矢量组合方式Tab.2 Composition of vectors for discontinuous modulation in the 2nd sector
如表2所示,为实现各小区内的断续调制,同时也要考虑中点电位,最直观的做法是在每个扇区采用两种矢量组合方式,每种组合方式只使用1对冗余矢量中的1个,方式1表示给上电容充电的矢量组合方式,方式2表示给下电容充电的组合方式。
2.2 VIENNA整流器大电流不动作断续调制及中点电位控制
为了进一步降低VIENNA整流器的开关损耗,通常当某一相电流达到最大值附近时,控制该相对应开关管处于连续的高电平或低电平状态。
以图2中第2扇区为例进行分析,图5为2.4和2.5小区大电流不开关角度。若系统工作在单位功率因数下,当α-β坐标系下的控制量Uref如图5所示时(虚线箭头表示控制量Uref的轨迹),给定电压矢量会落在2.2/2.3/2.4/2.5小区。由图3可知,2.2和2.4小区B相电流最大,且为正;2.3和2.5小区C相电流最大,且为负。所以2.4小区应该采用方式1,但采用此方式在2.2小区无法实现最大电流不开通,从图4中可以看出,这是因为此时针对B相实现不开关的序列中必将包含向量[+1+1 0],考虑图3中标示A相电流此时为负,根据VIENNA整流器的特点,该向量中的A相只能输出0或者-1,即[+1+1 0]向量无法实现。进一步,通过观察表2中2.2对应的2种开关组合方式可知,其方式1可以实现A相的断续调制,开关方式2可以实现C相的断续调制,尽管此时A相或C相非最大电流相,但也可以实现一定的效率提升。
图5 2.4和2.5小区大电流不开关角度Fig.5 2.4 and 2.5 cell high current non-switching angle
为此,为了优化系统效率,如图5所示,在2.4小区内实现方式1的最大电流不开关,在2.5小区实现方式2的最大电流不开关。
进一步再考虑系统中点电位控制的问题,当给定电压矢量Uref落在2.5小区的边界时,对应矢量U1,U2,如图5所示,则在2.5小区大电流不开关的区域是(π/3,π/3+θ),根据控制量的幅值M,再结合正余弦定理,即可求出θ的值,具体计算公式这里不再赘述。则在2.4和2.5小区内大电流不开关的角度为2θ。
为进一步提升效率,可以考虑在2.2/2.3内也实现某相的不开关。将图5进行细化,考虑到中点电位控制,引入变量Δ,如图6所示,其物理意义为进行中点电位控制时所需要的角度范围。在该角度范围内实现中点电位控制,当系统中点电位不平衡越大时,则需要该角度越大。而在该角度之外,则又可以将2.2和2.3区域进行如下处理:对2.2区域内且不包含在Δ之内的区域,采用表2中对应的方式1的调制办法;对2.3区域且不包含在Δ之内的区域,采用表2中对应的方式2的调制办法;而在Δ之内进行中点电位控制,选择方式1或者方式2。
图6 2.2和2.3小区Fig.6 2.2 and 2.3 sectors
在上文基础上,结合大电流不开关断续调制,得到VIENNA整流器矢量控制系统如图7所示。
图7 VIENNA整流器矢量控制系统Fig.7 VIENNA rectifier vector control system

必须指出的是,在系统的控制中,只要中点电位在系统允许范围内,是可以允许有一定波动的,这样更有利于通过断续调制降低整流器整体的开关频率。
3 仿真及实验验证
在Matlab软件里搭建三相三线VIENNA整流器的拓扑,仿真验证本文研究的调制方法,参数设置如下:三相市电相电压220 V/50 Hz,开关频率19.2 kHz,直流侧电压600 V,直流侧电容C1=C2=900 μF,输出功率5 kW。图8为Simulink中搭建的仿真结构图。
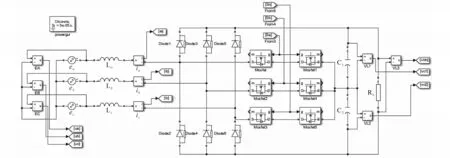
图8 仿真中搭建的VIENNA拓扑图Fig.8 VIENNA topology built in simulation
图9为C相电流和开关管的驱动波形SC,可看出C相电流处于峰值附近时,对应相的反向串联开关管不进行高频切换,从而实现了大电流不开关的断续调制,降低了开关损耗。

图9 C相电流和驱动波形Fig.9 Current and PWM waveforms of phase C
图10为直流母线电压、直流侧上下电容电压以及直流母线电压纹波的仿真波形。可以看出,直流侧上下电容的电压相等,直流母线电压的纹波范围在±15 V左右。
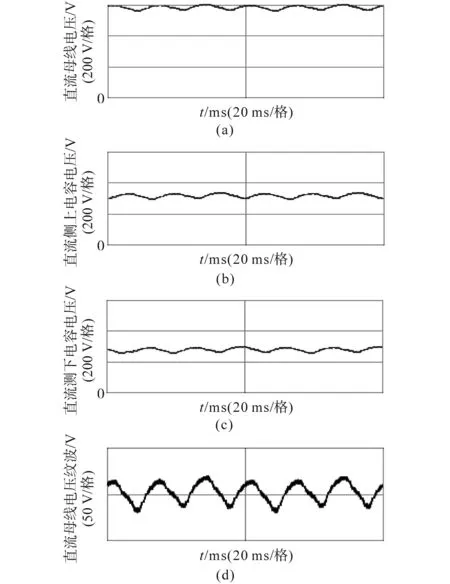
图10 直流母线电压、直流侧上下电容电压及纹波电压波形Fig.10 Waveforms of DC bus voltage,DC side upper and lower capacitor voltage and ripple voltage
搭建VIENNA整流器平台来进一步验证本文所提出的调制方法,控制板上采用TI公司的TMS320F2812作为主控制芯片;主功率开关器件采用K40T1202型号的IGBT;硬件电路参数与Matlab仿真参数相同。
图11为VIENNA整流器平台的输出电压纹波放大图,纹波幅值控制在15 V左右,尽管有一定的波动,但仍然是处于系统的允许范围之内。图12为C相驱动波形、C相电流以及输出直流电压波形,直流电压总体平滑稳定,流过C相的电流在达到电流最大值的附近时,该相的开关管不动作,故这种调制方式能在较大程度上提高系统的效率。
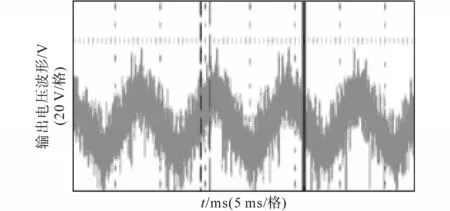
图11 VIENNA整流器输出电压纹波波形放大图Fig.11 The magnified waveform of VIENNA rectifier output voltage ripple
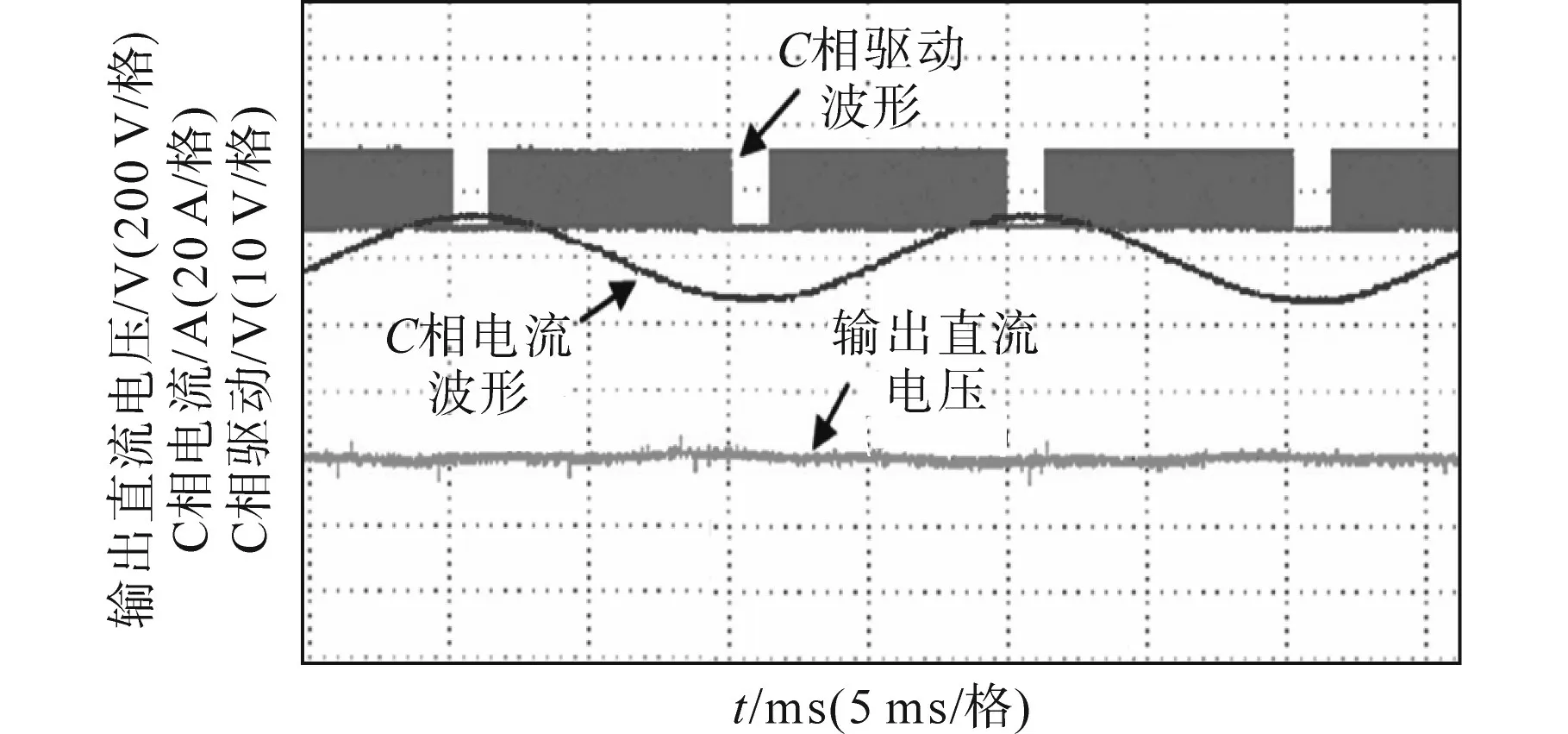
图12 VIENNA整流器C相输入电流以及对应的开关驱动波形Fig.12 Waveforms of VIENNA rectifier C-phase input current and corresponding switch drive
为了更加直观地验证本文所提出的这种调制方式对VIENNA整流器系统提升效率的作用,本文做了一组对比试验。效率对比如图13所示,其中,Po为输出功率。无差拍-DPWM调制是文献[8]采用的研究方法,大电流不开关断续调制是本文采用的研究方法。从图13中容易看出,在5种不同功率等级下,本文采用的大电流不开关断续调制的系统效率更高。
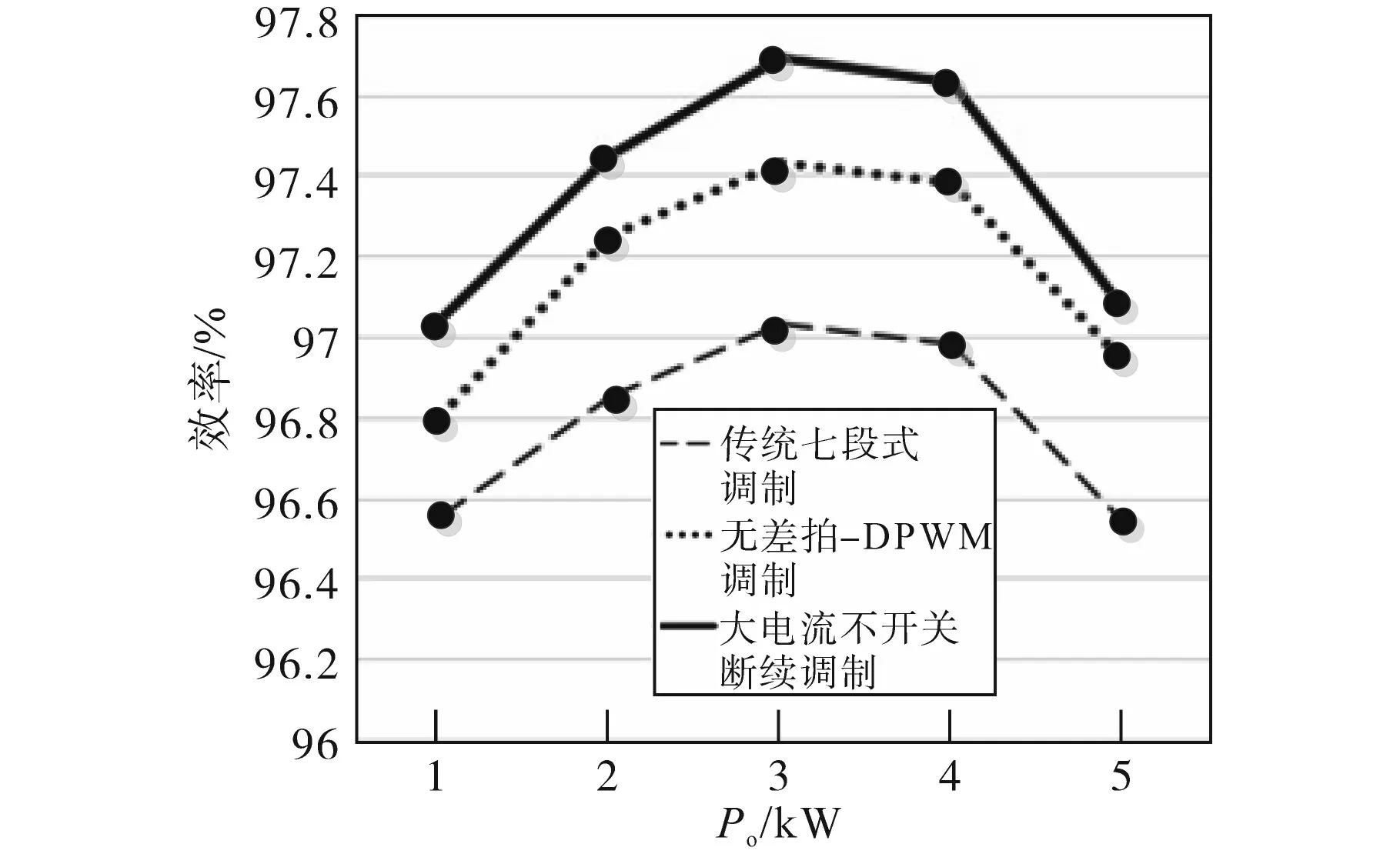
图13 效率对比Fig.13 Efficiency comparison
4 结论
本文主要提出了一种VIENNA整流器的断续调制算法,通过大电流的开关不动作可以提升系统效率。同时,本文还对断续调制时的中点电位控制技术进行了研究,并给出了相关的控制器,最终通过仿真和实验验证了所提调制算法和控制器的可行性。
猜你喜欢
南北桥(2022年2期)2022-05-31
微电机(2022年1期)2022-03-21
电子与封装(2021年7期)2021-07-29
科学家(2021年24期)2021-04-25
电脑知识与技术·经验技巧(2017年9期)2018-02-24
西南交通大学学报(2016年4期)2016-06-15
通信电源技术(2016年4期)2016-04-04
计算机技术与发展(2016年10期)2016-02-27
电源技术(2015年1期)2015-08-22
电测与仪表(2015年12期)2015-04-09