
平衡重式叉车稳定性研究方法分析及应用
2021-08-21 06:54尹凌鹏徐峰叶剑刚王玉龙赵明毛小玲
工程技术与管理 2021年12期
尹凌鹏 徐峰 叶剑刚 王玉龙 赵明 毛小玲
1.衢州职业技术学院,中国·浙江 衢州 324000
2.衢州市特种设备检验中心,中国·浙江 衢州 324000
1 引言
随着中国制造业的不断发展,中国叉车的销售量及使用量一直持续占据世界第一。而其中平衡重式叉车产量更是占了叉车总产量的一半以上。目前叉车广泛应用于工厂、码头、车站、货仓等各大行业之中,应用领域不断扩大,相对应的工作环境也越来越复杂,但其操作存在不规范的现象,因此叉车的安全性能显得越来越重要,有待进一步提高。由此可见,对叉车整体稳定性、安全性的研究具有重要意义。
2 叉车目前存在隐患
自1958年中国诞生第一台内燃叉车以来,叉车就得到迅速推广,大大提高了货物流通的效率。叉车按照动力来源通常可以分为二大类:内燃叉车、电动叉车。根据叉车结构的不同,又可以分为平衡重式叉车、前移式叉车、托盘堆垛车、侧面叉车等。近年来,叉车在中国的销售量都呈增长趋势。虽然近年来中美一直持续的贸易战对中国经济产生了一定的影响,但是就叉车行业来看,形势持续向好。根据中国工程机械工业协会公布的2019年的销售数据,中国叉车的全年总销售量高达608341 台,继续保持全球第一叉车生产大国和销售大国的地位。由此可见,中国是一个叉车使用大国。叉车已经逐渐成为中国加工类各行业不可或缺的搬运工具[1-2]。但叉车在使用过程中事故频发,由于叉车自身结构的特点,货叉抬升货物时整车的质心随之变化。绝大部分叉车事故都表现为叉车搬运货物过程中的倾翻,由此造成了巨大的经济损失。
平衡重式叉车是以叉车装设平衡重的方式来平衡货物重力,从而保持叉车的纵向重量平衡。平衡重式叉车事故频发的直接诱因就是货叉起升及搬运货物过程中货物重心的变化,所以对于叉车工作过程中货物重量数据的采集研究变得重要,通过研究货物重量数据及重心变化确定叉车工作状态及安全系数成为一个课题(如图1所示)。

图1 平衡重式叉车模型图
3 技术解决方案
平衡重式叉车稳定性分析主要分为静态稳定性和动态稳定性,其中以动态稳定性的分析为主。动态稳定性分析又分为侧向倾翻、前向倾翻和其他因素,这其中以侧向倾翻分析为主。即课题主要以平衡重式叉车的动态侧向稳定性为主要分析对象、建立模型、得出结论、优化设计、控制策略、最终实现平衡重式叉车整体安全性与可靠性的提高。主要分为几个步骤,如图2所示。

图2 项目拟采用的系统仿真优化方案
①建立叉车三维模型,同时量化影响叉车稳定性的各类参数,构建叉车工作过程稳定性数学模型。其中叉车侧翻因素包括:重心位置、车辆行驶速度、制动力、转弯半径、地面摩擦力、地面倾角等。
②将叉车行进过程中的各因素导入数学模型,各因素主要包括可量化参数,主要有:重心位置、车辆行驶速度、制动力、转弯半径、地面摩擦力、底盘作用力、地面倾角等。通过构建多传感信号数据平台,结合MATLAB、ADAMS、Modelica等软件建立叉车稳定性静态及动态仿真分析和半实物仿真分析,分析平衡重式叉车静态及动态过程特性,分析在重载状态下的叉车倾翻极限,查找出相关参数,并得出影响叉车稳定性的主要因素。
③解决方案。通过结构设计及控制策略改善等方法建立实物模型,改装叉车。再次测试工作过程中的各类参数,循环优化,直至达到最优化控制调制参数。
叉车稳定性控制系统解决方案验证和半实物仿真需要考虑多方面参数。传统的建模仿真设计只能建立单一领域的子系统模型,对单一系统进行充分分析,之后根据经验或实验参数进行系统验证及修正。但是这种评价方法不能对机械系统完成全面的评价,难以精确估算,同时达不到对系统的动态验证效果,所以无法得出一个科学合理的结论。而利用软件实现复杂系统中的多领域建模和仿真,对于同一系统下不同领域如机械、液压、控制等实现统一建模和互相耦合处理,这使得设计者能够更加关注模型原理,对提高半物理仿真的系统性和科学性有较大的帮助,对模型的健壮性有显著提高,能够更加科学、合理地评价系统。所以本项目试用Modelica建模,优化解决策略,提高叉车稳定性(如图3所示)。

图3 系统解决方案
④总结归纳。针对影响叉车倾翻的主要参数,提出解决方案。主要从两个方面着手解决:一为通过控制策略。结合叉车现有系统,植入控制系统。运用控制器及叉车现有结构,对叉车行进速度及工作状态极限进行控制,当超过极限值时,通过发出警告或强制限速等方式保证叉车稳定,并通过半物理仿真验证其可行性;二为通过结构设计。通过改装叉车现有结构,对叉车整体底盘结构或相关机构进行改进优化,提高其整体稳定性和安全性。最后对其进行仿真试验和实际测试。得出优化结构,归纳各类最优化参数,并得出结论。
4 载重量参数采集
平衡重式叉车的稳定性控制至今为止也没有找到可靠的方法或技术,论文主要通过采集叉车工作过程中的货叉变形参数来掌握货物重量的实时状态。
false 试验选用的元件包括供电电源、按键控件、压力传感器、LED 液晶显示屏、蓝牙模块、数据串口交互、单片机。单片机作为系统CPU 处于核心位置,对数据进行加工处理及运算(如图4所示)。
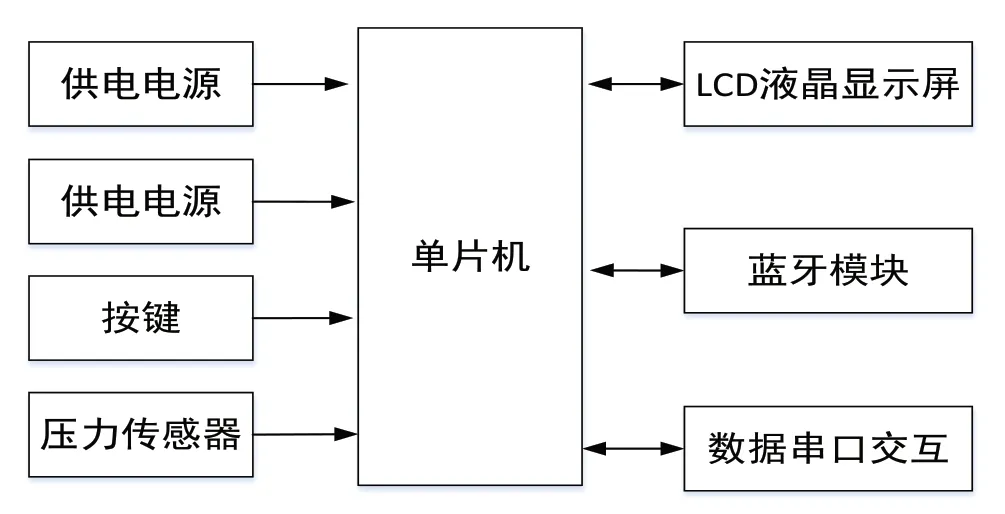
图4 数据采集方案
通过模型试验,整体效果良好,能够将货物重量参数通过6 组数据上传至LED 显示,达到对货物参数实时采集的目的。根据上传的数据离线以及在线显示压力数据,从而更好的分析车辆的运行过程与情况,有利于进一步开发及研究[3-5](如图5所示)。
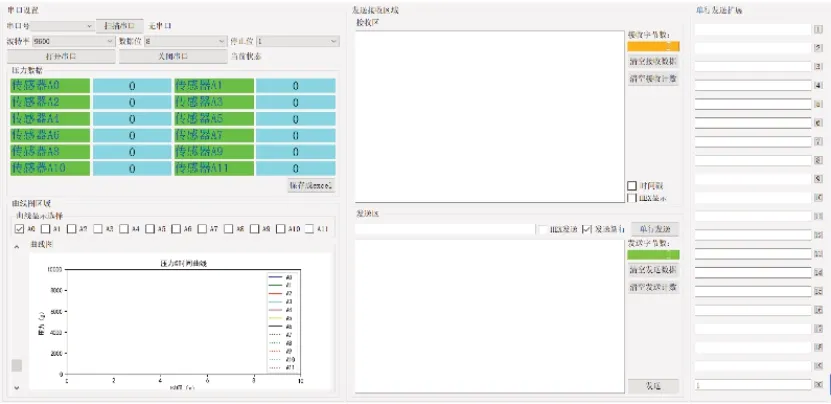
图5 数据采集
5 结语
平衡重式叉车由于转向轴和车架的特殊性,导致车辆运动过程中重心变化较大,导致车辆稳定性较差。论文在叉车稳定性分析的基础之上,提出了叉车稳定性优化策略,提出了分析叉车稳定性的一些研究方法,并开展了叉车工作过程数据采集试验,效果良好。为进一步研究车辆重心动态监测方法做好了技术准备。通过实时分析车辆重心位置,估计车辆倾翻概率,对叉车最大负荷、车辆最大转角、行驶速度等主要参数进行限制,更为有效地降低平衡重式叉车倾覆事故发生概率。
猜你喜欢
中国储运(2022年11期)2022-11-30
中国储运(2022年6期)2022-06-18
小猕猴学习画刊(2019年9期)2019-11-08
数学物理学报(2018年1期)2018-03-26
小天使·三年级语数英综合(2017年6期)2017-06-07
广州大学学报(自然科学版)(2016年2期)2017-01-15
厦门理工学院学报(2016年1期)2016-12-01
中国储运(2016年8期)2016-09-02
郑州大学学报(理学版)(2012年4期)2012-03-25
娃娃画报(2009年11期)2009-12-07
