北京大兴机场线接触网检测系统设计方案研究
2021-08-20 09:20:34赵立峰
现代城市轨道交通 2021年8期
赵立峰
(北京市轨道交通建设管理有限公司,北京 100068)
1 研究背景
北京大兴机场线一期工程南起新机场北航站楼(远期随机场扩建延伸至南航站楼),北至草桥站,线路全长41.36 km,运营设计速度160 km/h,全部为地下站,其中地下线和U型槽23.65 km,高架和路基段17.71 km。
接触网是运营电客车取流直接相关的架空设备,其工作环境恶劣、周边环境十分复杂,沿线架设且无备用,是整个牵引供电系统最为薄弱的环节。随着城市轨道交通的快速发展,长期存在的维修时间不足及缺乏合理检测手段等问题,导致接触网系统运行检修问题日益凸显。接触网供电系统的正常运行是轨道交通安全运营的重要保障,只有保证接触网供电系统的安全可靠,才能使轨道交通牵引供电系统和电客车长期稳定运行。
目前,对接触网供电系统的检查主要包括2种方式,其一为人工定期巡视检查,如采用徒步巡视,或者在天窗期内利用接触网作业车或梯车进行平推检查,该方法效率低,强度大,且故障隐患不易发现;其二为采用安装于专用检测车上的接触网检测设备对接触网状态进行检测,普遍应用于国家铁路线路,但在城市轨道交通线路检测中应用较少,且检测功能单一,难以兼顾接触网各项应用参数的实时监测。因此,本文针对北京大兴机场线研发并推出一款以运营电客车为载体的轨道交通接触网检测系统,能够在电客车正常运行时,自动实现架空接触网供电系统状态的实时、动态检测,可快速有效地发现接触网异常状态,自动记录并提供缺陷位置、缺陷种类、故障等级等相关信息,从而有效地指导各维修部门快速对接触网供电系统进行维护。
2 北京大兴机场线接触网检测系统
北京大兴机场线接触网检测系统集成了弓网综合检测装置(以下简称“1C装置”)、车载弓网运行状态检测装置(以下简称“3C装置”)以及接触网悬挂状态检测监测装置(以下简称“4C装置”)等3套检测装置,分别安装于同一列电客车不同的车厢上,采用1 套综合定位系统实现装置的检测数据实时定位,并关联线路里程信息。其中, 1C装置主要对接触网的状态参数和弓网受流参数进行检测和测量; 3C装置主要对接触网几何参数、弓网燃弧、弓网视频、接触网温度进行实时检测;4C装置主要对接触网定位装置、支持装置、悬挂装置、附加悬挂、支/吊柱及零部件实施成像检测。该系统具备全自动运行功能(自动启停控制、制定检测计划并运行、自动参数调节、软件系统功能预置和随时灵活更改检测位置、可接受外部控制指令实现远程开关机等操作),全程无需人工参与即可完成接触网线路检测任务。
北京大兴机场线接触网检测系统架构如图 1所示。
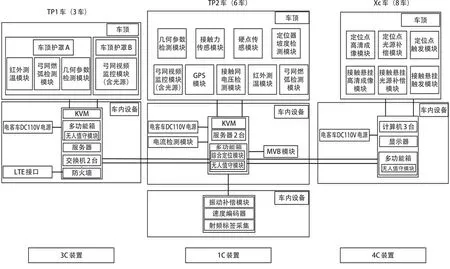
图1 接触网检测系统架构图
3 主要功能
3.1 弓网综合检测功能
北京大兴机场线接触网检测系统集成了1C装置,安装于运营电客车上,能在运行速度为160 km/h的条件下,通过车载在线检测方式,实现接触网几何参数、弓网动态参数的实时采集、分析,能自动识别接触网几何参数超限、弓网燃弧异常等,从而及时预防故障,有的放矢地维护处理,有效保证列车安全运营。
1C装置由车顶数据采集设备、车内控制设备及车底辅助定位设备三大部分组成:
(1)车顶采集设备分别集成了接触动态作用参数检测模块、非接触式几何参数检测模块、弓网视频监控模块、弓网燃弧检测模块等;
(2)车内设备包括前置信号处理机、检测主机等设备;
(3)车底设备包括速度里程测量模块和车体振动补偿测量模块。
1C装置主要部件结构框图如图2所示。
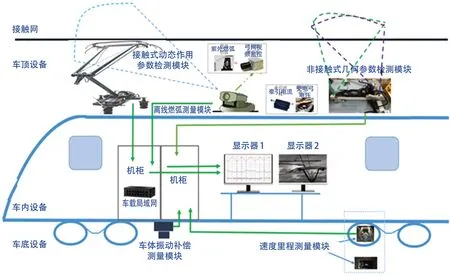
图2 1C装置主要部件结构框图
3.2 车载弓网运行状态检测功能
针对北京大兴机场线线路特点,接触网检测系统配置1套3C装置,采用非接触式检测技术,对弓网运行状态进行实时动态检测监测。
在电客车正常运行时, 3C装置可实现架空接触网几何参数、弓网燃弧、弓网视频、接触网温度的实时及动态检测,快速有效地发现接触网或受电弓异常状态,自动记录并提供缺陷位置、缺陷种类、故障等级等相关信息,从而有效地指导各维修部门快速对弓网系统进行维护。
3C装置由车顶采集设备和车内主机组成。其中:
(1)车顶设备由接触网几何参数检测模块、弓网燃弧检测模块、弓网视频监控模块、红外测温模块、数据无线传输模块等组成;
(2)车内主机集成了供电管理模块、数据处理模块、数据存储模块、远程控制模块等。
3C装置主要部件结构框图如图3所示。

图3 3C装置主要部件结构框图
3.3 接触网悬挂状态检测功能
北京大兴机场线接触网检测系统4C装置采用高清相机对接触网检测区域进行图像采集,输出高清图像。成像范围覆盖沿线接触网悬挂设备,成像图片的清晰度足够分辨支持装置及接触悬挂零部件的异常状态。
4C装置在列车运行时,采用高清工业相机组件对行车线路的接触网定位装置、支持装置、悬挂装置、附加悬挂、支/吊柱座以及零部件进行全覆盖成像检测。通过对这些检测数据的识别与分析,全面掌握接触网状态,指导接触网维护。
4C装置主要由高清工业相机阵列、补偿光源阵列、触发模块、服务器及综合定位模块组成。其中,触发模块用于在车辆运行过程中,探测接触网定位点设备位置,并给高清工业相机及补偿光源阵列提供触发信号,实现对接触网零部件的高清拍摄,所采集图像经服务器采集后存储在硬盘中,由分析软件分析并获得接触网零部件缺陷。4C装置主要部件结构框图如图4所示。

图4 4C装置主要部件结构框图
3.4 综合定位功能
电客车在运行过程中,检测设备主要依赖于综合定位系统提供实时的综合定位信息(主要包括当前的运行速度和线路里程信息)关联检测数据实时里程信息。然而定位信息不准或传输存在延时,均会导致实际的检测数据与线路信息关联错误,导致定位不准,影响后期数据分析。因此,综合定位功能是该系统功能实现的关键因素。
3.4.1 综合定位系统组成
综合定位系统由数据采集、数据库、数据下发和参数设置4个部分构成,综合定位系统功能如图5所示。

图5 综合定位系统功能图
其中数据采集部分采集列车上配备的定位信号,算出可靠的位置信息;数据库部分预先建立GPS公里标、电子标签信息和杆号信息等基础线路信息数据库;数据下发部分将得到的定位信息发送给各个需要的模块;参数设置部分可以预设线路信息,也可以在运行时设置线路信息。该系统可以很好地克服接触网巡检系统中定位误差大的问题,提高了接触网巡检数据的利用率。
3.4.2 定位算法方案
精准定位主要以速度传感器为基础实现,其他外接设备用于校正公里标。算法主要考虑需要矫正的选项问题。各定位设备误差及来源分析如表1所示。
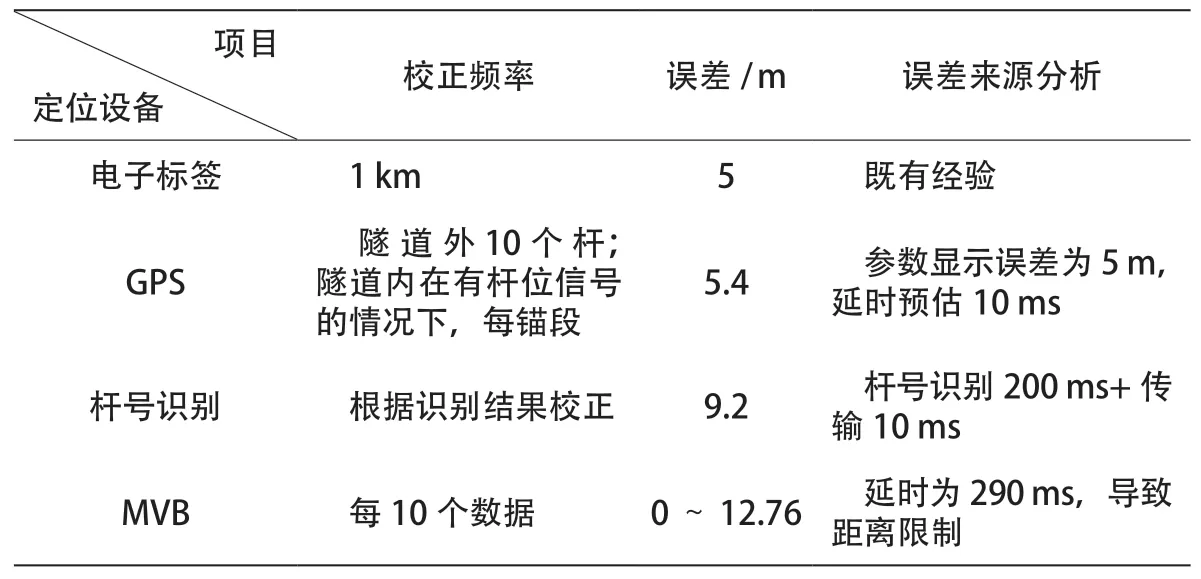
表1 各定位设备误差对比
综合定位系统工作流程如图6所示。
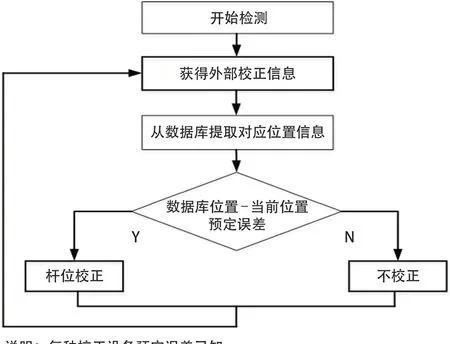
图6 综合定位系统工作流程图
(1)GPS矫正。GPS数据库查找出的公里标并不是实时矫正的。只有当GPS数据库公里标满足以下算法时,才使用GPS矫正:①GPS当前点和数据库中最近点的距离小于GPS定位误差;②(GPS误差+ GPS当前点和数据库最近点距离)小于绝对值(GPS数据库公里标-当前公里标);③GPS当前点和数据库中最近点的距离小于前一次GPS采集点和数据库中最近点距离。当GPS点查询出的数据库公里标满足上述要求时,综合定位系统将GPS数据库公里标设置为当前公里标。
(2)电子标签矫正。当电子标签误差小于绝对值(电子标签数据库公里标-当前公里标)时进行矫正。电子标签触发为连续触发,只有当电子标签第一次触发时进行矫正。其后连续触发,将丢弃电子标签触发信号。因此,电子标签越近才触发的类型精度将高于很远就触发的电子标签。
(3)MVB机车信息矫正。MVB机车信号实际就是电客车系统的定位信号。MVB定位误差就是其他系统定位时产生的误差。比如其他系统使用电子标签定位,那么这个误差就是电子标签误差。MVB延时误差就是本系统收到定位时,与MVB系统定位有时间延时导致的。延时误差算法为:最大延时时间×最大列车速度。只有满足如下条件才进行矫正:(MVB定位误差 +MVB延时误差)<绝对值(电子标签数据库公里标 -当前公里标)。
(4)杆号识别矫正。综合定位系统为进行杆号识别矫正,需要保存1 s内的所有速度传感器的定位信息,同时规定杆号识别必须在1 s完成。杆号识别矫正步骤如下:①本系统和杆号图像采集软件必须使用同一个授时服务进行本地实际矫正,同时图像采集软件采集到图像后,对该图片立刻进行时间标定;②杆号识别软件需要将图片采集时间和识别的杆号一同发送给综合定位服务器;③图片采集时间必须晚于综合定位系统保存的最晚速度传感器时间,如果不满足则丢弃;④根据图片采集时间最近的速度传感器的里程信息,检索周围10个杆的杆号,如果其中某一杆号和算法识别的杆号一致,系统将根据该杆号矫正当前定位信息。矫正方法:使用当时里程和现在的里程相减得到相对里程,使用相对里程,将定位杆矫正到当前杆。
4 关键技术研究
4.1 运营车无人值守
由于运营电客车设计要求,无法在车上配置专用的检测设备操作室,基于此,为保障设备正常运行,结合电客车运行情况,设计开发无人值守模块,并配以软件开发,实现接触网检测系统全自动运行(自动启停控制、制定检测计划并运行、自动参数调节、软件系统功能预置和随时灵活更改检测位置、可接受外部控制指令实现远程开关机等操作)及远端控制。无人值守模块负责通过与接触网监测管理系统(CMMS)之间的通信,实现对继电器的控制,以此实现系统的开关机及上电操作。
4.1.1 远程控制网络拓扑图
列车远程控制网络拓扑图如图7所示。
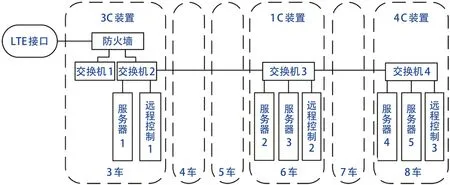
图7 远程控制网络拓扑图
(1)控制接口(LTE接口)由3车接入,通过防火墙后与各远程控制模块通过交换机相连。为保证网络链接可靠,所有交换机均上电运行且不由远程控制模块对其电源进行控制。
(2)交换机1、交换机3和交换机4实现双环网的数据交换功能;交换机2(三层交换机)具有路由交换功能,具备对LTE信息的接收和分发功能(可直接将LTE数据分发到每个远程控制模块或是网络上的服务器)。
(3)交换机2到防火墙以及LTE为外部网络,交换机2以及除防火墙以外的网络为内部网络,内网和外网分属不同的网段,以免IP出现冲突。
4.1.2 远程控制功能说明
列车远程控制功能如图8所示。
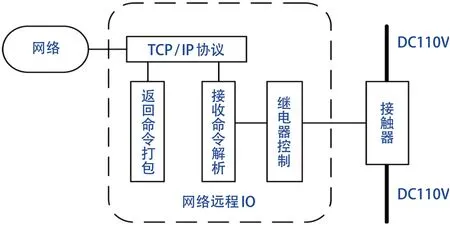
图8 远程控制功能框图
(1)被控设备电源中串联接触器,通过网络远程输入/输出(IO)控制其接触器来达到远程控制的目的。
(2)网络远程IO具有网络解析功能,支持传输控制协议/网际协议(TCP / IP)服务,直接和交换机相连可通过网络获取远程控制命令,并可通过网络返回远程控制结果。
4.1.3 元器件级设备监控
接触网检测系统可实现元器件级设备的监控,监控内容包括直接监控元件(如各种传感器、相机、服务器、不间断电源(UPS)等可通过直接读取其工作状态信息进行监控的元件)及间接监控元件(包括辅助光源、激光器等不能通过读取工作状态信息进行监控的元件)。
对于直接监控元件,通过软件读取其工作状态数据进行监控;对于间接监控元件,则通过借助于直接监控元件反映出的间距监控元件状态进行监控。
在采集计算机的采集软件中,设置采集监控功能模块,采集软件在工作时实时采集各直接监控元件的数据,采集监控功能模块根据数据状态判断这些元件的工作状态;同时,通过对采集数据的状态进行分析,判断间距监控元件的工作状态(如通过图像变暗,可以判断光源异常;通过触发相机正常时却长时间不能触发,可判断触发激光器异常等)。
监控功能模块将上述信息实时发送给系统监控功能软件,后者通过LTE方式,将故障信息发送给CMMS系统。同时,监控功能模块定时向系统监控功能软件发送心跳包,后者根据该心跳包判断软件及监控服务器的工作状态。
4.2 定位点触发设计方案
4C装置在动态检测过程中,需对途经的定位装置、支持装置等目标进行高清抓拍,要求启动快门的时间准确,成像目标处于图像中主要区域。本系统基于先进的激光测量和线阵图像处理技术,研制了专用定位触发模块,能有效判定巡线过程中目标的出现,从而确定高清成像抓拍的时机。
考虑到刚性及柔性接触网定位点目标的差异性,引入线阵相机及线光源共线模块,线光源为线阵相机提供光源补偿。工作时,二者以从下向上的视野对线路上方的接触网进行连续拍摄,并通过图像识别方法,提取图像中目标物特征,确定目标物出现在图像中特定位置,并根据图像信息判定误触发情况,排除干扰信息,保证实际触发信号的可靠性。识别结果和触发抓拍功能实时同步,达到1 ms以内的延时响应控制,给出触发信号,控制相机及光源工作,保证列车在行车条件下拍摄位置的准确性。
4.3 车体综合补偿检测设备
为提高本系统1C装置检测精度,车底安装有路轨综合振动补偿设备,用以建立惯性基准,修正接触网几何参数检测误差,使之更加接近静态真实值,从而提高检测精度。
车体综合补偿检测设备检测采用2D激光传感技术实现对钢轨及车体状态实时监测,如图9所示。通过监测到的状态数据建立惯性坐标系,以得到静态时接触网距离钢轨顶面的垂直高度和接触网中心距离两钢轨中心的水平距离,然后根据建立的坐标系进行运算,从而消除车辆及路轨晃动等因素对测量结果的影响,提高接触网几何参数检测精度。该设备具有检测技术先进、检测精度高等特点。
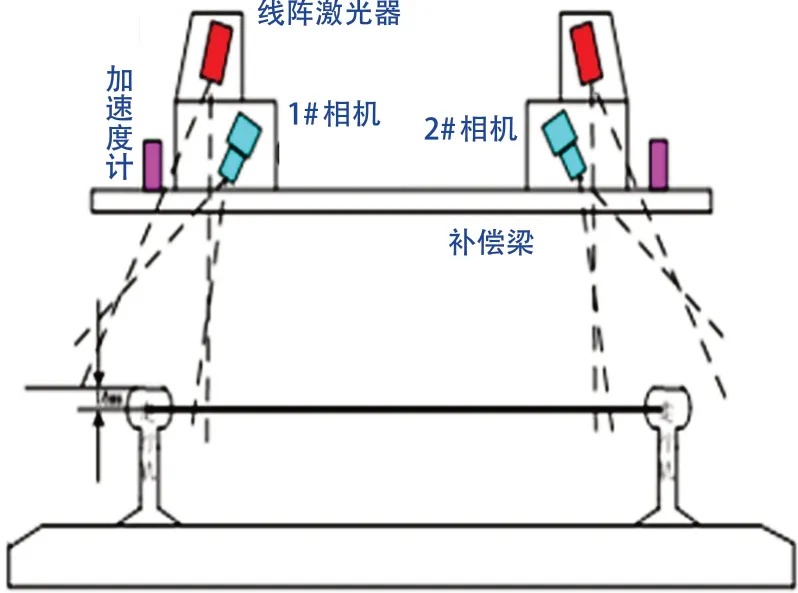
图9 综合振动补偿设备工作原理图
车体综合补偿检测设备将测量到的车体左右偏移的距离和车体倾斜所造成的偏移数据,通过现场总线传送到工控机。在静态时,通过1#、2#摄像机的成像和数据获取各自相对于最近钢轨的水平距离,并将该距离定为初始状态的标定距离。在动态(检测车运行)时,通过1#、2#摄像机的成像和数据,获取车体动态运行中相对于钢轨基准的水平距离,然后由动态水平距离减去静态水平距离得到的差值,即为车体左右摆动偏差,通过相应的补偿算法补偿到接触网几何参数中。
5 结论
通过对安装于北京大兴机场线运营电客车上的接触网检测系统各组成装置的设计研究,阐述了检测系统可实现的主要功能及达到的技术指标,且在北京大兴机场线得到成功应用,取得良好的检测效果。该系统的研发对保障列车运行安全和稳定运营具有重要意义,对形成运营线路的科学维护体系具有重要作用,对推进我国运营电客车接触网安全检测技术的发展具有重要价值。
猜你喜欢
云南画报(2021年10期)2021-11-24 01:06:38
测控技术(2018年8期)2018-11-25 07:42:30
上海铁道增刊(2017年3期)2018-01-22 03:01:24
中国交通信息化(2017年8期)2017-06-06 07:16:42
电子测试(2017年23期)2017-04-04 05:06:44
西南交通大学学报(2016年3期)2016-06-15 20:29:35
现代工业经济和信息化(2016年4期)2016-05-17 05:35:37
电气化铁道(2016年4期)2016-04-16 05:59:44
铁道科学与工程学报(2015年5期)2015-12-24 12:12:04
中国交通信息化(2015年11期)2015-06-06 06:51:37