不同解算策略对PPP的影响研究
2021-08-20 04:11常晶
南方农机 2021年15期
常 晶
(华北理工大学矿业工程学院,河北 唐山 063210)
王涛涛等[1]根据精密单点定位原理,对4种不同时长(30 min、1 h、2 h、24 h)的GNSS观测数据进行了RTKLIB精密单点定位测试,分析了RTKLIB单点定位精度与时长的量化关系,并给出了实用性高的参数组合。管真等[2]分析了GNSS卫星星历几种类型的精度,并对精密星历进行了详细分析,将超快星历、快速星历和最终星历对比后得出,快速星历在精度上比较接近最终星历,通过对比常用的几种卫星坐标插值拟合方法,认为采用Chebyshev多项式拟合方法对精密星历进行拟合插值,拟合效果比较好。何一辛等[3]利用IGS不同分析中心提供的精密轨道和钟差产品,对全球分布的15个跟踪站进行精密单点定位解算得到了德国地学研究中心(GFZ)、欧洲航天局(ESA)及欧洲定轨中心(CODE)的产品较为优秀而且在实际PPP解算时应注意提高轨道产品精度。程贇等[4]利用ICS提供的综合精密产品和不同分析中心的精密产品,比较分析了不同分析中心精密轨道和精密钟差产品的区别,并基于RTKLIB比较不同分析中心精密产品PPP单天解相对于IGSPPP单天解的点位分量误差,得出尽管不同分析中心的精密轨道和精密钟差产品存在差异,但采用同一分析中心精密产品进行精密单点定位时,其X、Y、Z坐标分量偏差均在mm级,其点位定位误差在2 mm~8 mm之间波动,而且同一分析中心的轨道和钟差产品具有自洽性和一致性。
1 RTKLIB精密单点定位算法分析
1.1 RTKLIB介绍
RTKLIB软件选择精密单点定位算法的情况下,解算步骤包含资料提取和处理、信息预处理、观测建模以及误差修复等。
在全球导航卫星系统GNSS中,RTKLIB属于重要标准,其来源于日本东京海洋大学,关键的功能如下。
1)允许各类GNSS系统的基础以及精密定位算法,尤其是GPS、GLONASS等。
2)允许各类GNSS实时以及后处理模式,具体有单点定位、DGPS/DGNSS等。
3)允许各类GNSS标准格式以及协议:RINEX2.10、RINEX2.11等。
4)允许各类GNSS接收装置专用数据协议模式:OEMStar、NVS等。
1.2 RTKLIB精密单点定位解算流程
RTKLIB内部借助GPST(GPST时间)应用到GNSS的数据处置以及定位算法方面。数据从RTKLIB内展开处置前,应当调整成GPST时间。选择GPST的主要因素在于防范处理润秒。接收装置以及卫星的方位从RTKLIB内体现成ECEF坐标体系里的X、Y、Z轴。但是,能够评估精密单点定位准确性的坐标属于接收装置方位的本地坐标,即ENU坐标,这一坐标基本从GNSS导航处理。基于此,ECEF坐标至本地ENU坐标存在转换的问题,其转换能够借助旋转矩阵解决。
RTKLIB的算法完善,导航以及定位能力卓越,能够解决各类GNSS定位解算。从该软件内执行精密单点定位需要依赖于RTKPOST功能组,其中涉及六个方面,能够实现资料提取和处理、模糊度运算等功能。RTKLIB精密单点定位的算法流程如图1所示。
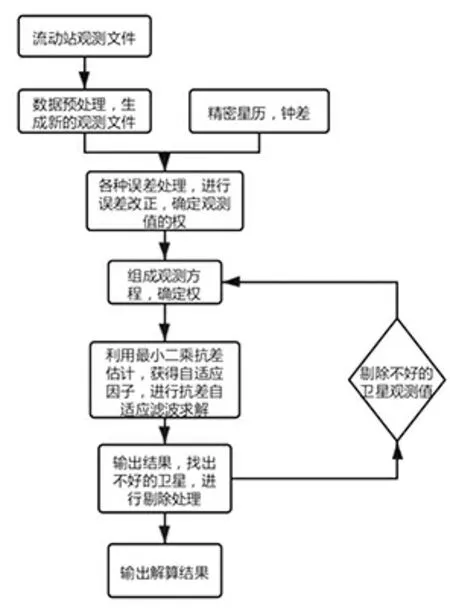
图1 RTKLIB精密单点定位算法流程图
2 不同解算策略对精密单点定位性能的影响分析
本实验采用2015年1月1日JFNG站的观测数据。试验的具体策略如下。
1)先后借助向前、向后滤波展开了GPS-PPP静态定位。
2)分别选取了15°、20°、30°和45°四个值进行GPSPPP静态定位。
3)分别使用精密单点定位静态解算模式(PPP Static)、精密单点定位动态模式(PPPKinematic)进行比较。
4)不同对流层模型GPS-PPP静态定位。
2.1 不同滤波方法对PPP收敛速度和定位精度的影响
为研究各种滤波方式在PPP收敛效率以及定位准确性上的作用,图2提到测站前/后向滤波GPS-PPP的定位情况。具体来看,E、N、U三种路径当中,前向滤波方式收敛效果优于后向滤波,但是从稳定性以及精度两个层面的差异不明显,对于RMS值,在测站前向滤波GPS-PPP当中,RMS数据均低于后向滤波,并且,两种测站RMS数据也没有超过3 cm。所以,前向滤波法有利于增强收敛效率。在RMS数据来看,E路径中,前向滤波法可以实现更低的RMS值,由此让PPP精度有所提高,然而,N和U方向前向滤波法对PPP精度改善略差于E方向。所以,从展开PPP数据处理的阶段借助前向滤波法能够提升PPP收敛效率,降低收敛的时间损耗,并且在精度方面起到了优化作用。
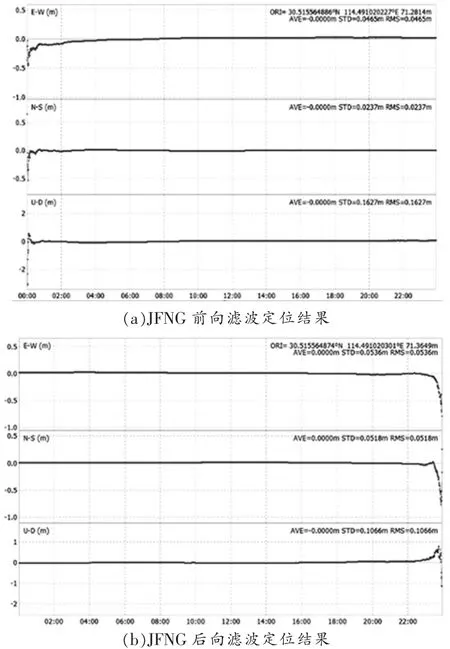
图2 前/后向滤波PPP定位解算精度对比分析
2.2 不同卫星截止高度角对PPP收敛速度和定位精度的影响
卫星截止高度角主要作用在于限制遮挡物,或者多线路效应下建立的蔽遮高度角,没有达到这一角视空域的卫星无需追踪。
从展开精密单点定位静态运算阶段,卫星截止高度角能够干预测站关于卫星的观察时间,并且还能影响观测信息,而观测信息属于精密单点定位的重要参考依据。另一方面,卫星截止高度角有差异的情况下,精密单点定位阶段各方面误差也会有一定的区别,其共同干预精密单点定位最后的运算精确性。
本实验选择2015年1月1日JFNG站的观测值,展开PPP静态解算,确定15°、20°、30°、45°四个高度角,FNG测站的不同卫星截止高度角下PPP定位解算精度对比分析如图3所示。

图3 JFNG测站不同卫星截止高度角下PPP定位解算精度对比分析
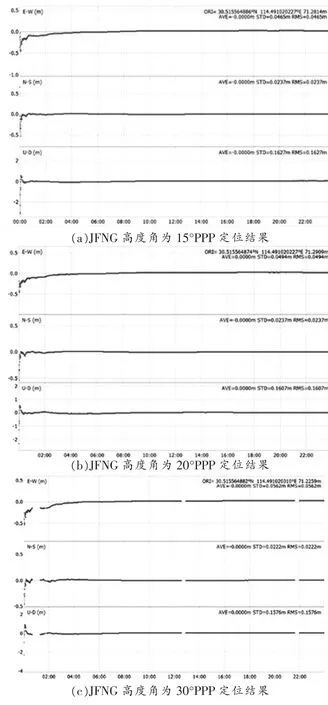
根据上图能够得知,在各种截止高度角中,PPP收敛时间有一定的拉长,15°、20°的收敛时间较为相同,在0.5 h左右,如果高度角设定成30°的情况下,收敛时间拉长,基本处在1 h,如果高度角在45°情况下,解算缺乏稳定性,定位同样也面临干预。
2.3 不同解算模式对PPP收敛速度和定位精度的影响
RTKLIB中有三类PPP解算方式,具体为静态解算模式、动态模式和固定模式。
1)静态精密单点定位属于目前最为普遍的一种定位模式,借助各个频率观测数据的相互结合,产生组合观测值,应对其中误差,增强定位精度,不过考虑到参数估算方式难以解决高动态数据,从实践上存在局限。
2)动态精密单点定位模式。主要的原理在于借助MGEX精密星历等,基于接收装置的观测信息展开动态非差处置,实现精度要求。因为在独立性、动态性等方面的优势,该技术从高精度动态应用方面体现了不可替代的作用。
实验纳入了JFNG站2015年1月1日的测量信息,精密星历主要选择IGS提到的15 min间距的轨道以及钟差产品,具体名为igs18775.sp3。
本实验依托于GPS单系统实施,而最后的结果储存于格式为.pos的文件内,结合RTKPLOT系统表现详细的定位结果,FNG测站的不同定位模式下PPP定位结果精度分析如图4所示。
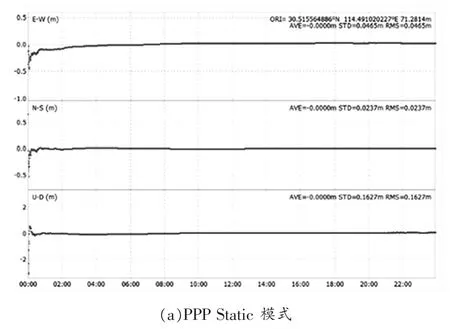

图4 JFNG测站的不同定位模式下PPP定位结果精度分析
根据上图能够发现,两类定位模式均可以实施PPP解算,不过,E、N、U三种路径当中的误差图显示,基于PPPStatic模式,输出结果相对PPPKinematic更平稳。在误差程度上展开对比,PPPKinematic仅可以满足亚米级精度要求,不过PPPStatic可以达成厘米级精度需求。
2.4 不同对流层模型对PPP收敛速度和定位精度的影响
涉及对流层干延迟误差的问题,一般应用ztd-est等模型,而对流层湿延迟误差更加适用于随机游走。
图5先后体现了JFNG测站不同模型的GPS-PPP静态定位误差情况。基于图5,选择Saastamoinen模型的情况下,表现在PPP收敛速度以及精度方面的作用明显,误差和其余模型对比之下更差,尤其是U路径中的误差和其余两条路径对比更大,而选择Estimate ZTD、Estimate ZTD+Grad的情况下,误差更加可控,收敛效率更高,同时,两个对流层模型收敛周期以及精度基本一致,Estimate ZTD+Grad表现出轻微的优势,且两个模型的RMS数据都不超过2 cm,而Saastamoinen模型无法控制到3 cm内。
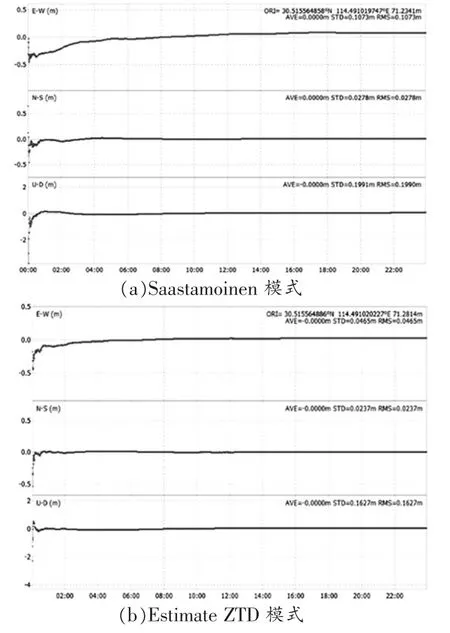
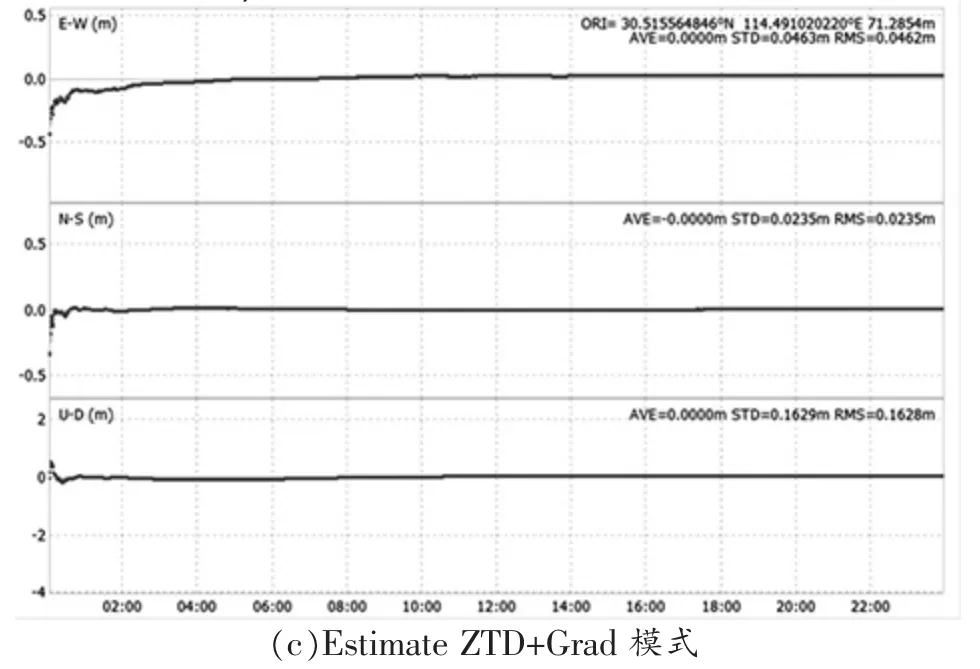
图5 JFNG测站的不同对流层改正模型下PPP定位结果
3 结论
通过不同解算策略对精密单点定位功能的影响探究,发现在实施PPP数据处理的阶段,借助前向滤波法能够增强PPP收敛能力,并且在定位精度方面存在优化作用;卫星截止高度角在30°范围内几乎不考虑PPP收敛方面的影响,若大于30°,则收敛速度和高度角反向变动;在PPP解算中,如果与Kinematic模式对比,Static模式定位存在一定的精度优势;选择Saastamoinen模型的情况下,PPP收敛速度、精度将面临显著的影响。从RTKLIB软件来看,主要对周跳展开测量,但不展开修正,其算法的优化有待探究。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
汽车实用技术(2022年11期)2022-06-20
测绘地理信息(2022年2期)2022-04-02
导航定位学报(2021年4期)2021-08-29
矿山测量(2021年2期)2021-05-07
导航定位与授时(2020年4期)2020-07-29
全球定位系统(2020年1期)2020-03-31
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
作文与考试·小学高年级版(2017年16期)2017-08-14