
基于行波的全并联AT接触网多分支故障测距方案
2021-08-18 14:05黎宁昊
电气技术与经济 2021年4期
黎宁昊
(中国铁路上海局集团有限公司苏州铁路工程建设指挥部)
0 引言
近年来,随着我国高速铁路的快速发展,截止2020年全国高速铁路运营里程高达12万km,随着高铁事业的稳定快速发展,高速铁路电能质量显得极为重要,牵引供电系统作为我国高速铁路重要的组成部分,其系统的稳定性直接影响了高铁动车组的安全运行。高速铁路的供电系统沿铁路沿线架设,线路走廊为荒郊野外,供电自然环境恶劣且无备用线路,传统的故障测距方案为阻抗法故障测距,当线路发生故障跳闸时,通过故障时线路故障录波来进行故障的阻抗计算,此类计算方法当故障为高阻故障时,故障测距精度较低,尤其是针对线路存在多段T接时,此时故障测距精度直接影响了高铁停运时间,因此快速查找故障且恢复显得极为重要。本文从行波法故障测距角度出发,利用行波法测距不受牵引供电系统运行方式的影响,从而实现多分支全并联AT多分支线路故障测距。
1 多分支结构简介
我国电气化铁路采用多种供电方式,由传统的直供到带回流线的供电方式再到自耦变压器供电方式,无一不是为了满足我国铁路供电的稳定性和高负荷性。由于我国高速铁路的“八纵八横”发展规划,高速铁路线路复杂程度越来越高,从传统的上下行全并联AT供电方式演变为多分支的上下行全并联供电方式,如图1所示为全并联AT供电方式多分支线路示意图,随着全并联AT供电方式的接线方式越来越复杂,线路呈现多段T接分支,导致原本阻抗均匀的线路变得线路阻抗呈现分段趋势,导致应用于全并联AT故障测距的阻抗法故障测距精度不高,甚至出现区段误判情况,从而严重影响了高速铁路稳定运营,因此急需一种可满足现行的上下行全并联AT多分支线路故障测距方法。
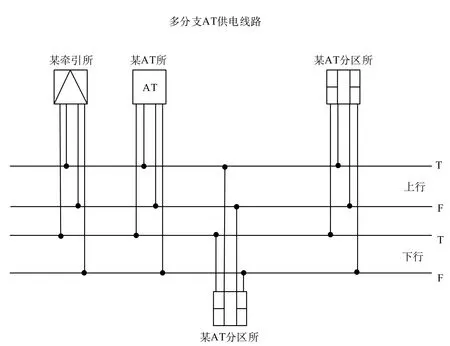
图1 分支全并联AT供电示等效图
2 行波测距原理
行波法故障定位是指在高压线路上电压或者电流发生抖动时,线路上会产生高频暂态行波,利用高频暂态行波进行在线路上折反射时间差来进行故障定位,行波法测距概念于20世纪80年代提出,经过傅里叶变换、小波包变换数据处理之后可求取行波折反射的时刻,结合现行的高精度GPS对时模块,可实现线路的故障跳闸的精确定位,行波法故障定位最开始应用于高压输电线路上,由于高压输电线路线路杂波较少,线路环境杂质较少,可实现高压输电线路的故障精确定位。图2为D行波法故障测距原理。
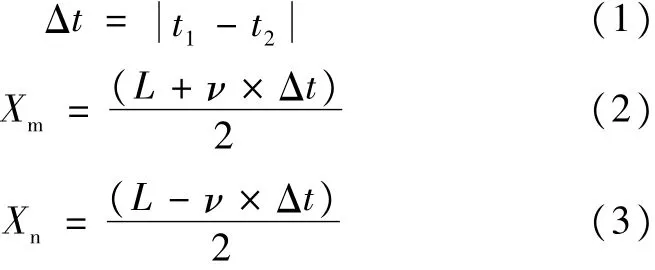
如图2所示,m、n为两行波监测终端,Q点为接地故障点,Xm为接地放电点距离监测终端m的距离,Xn为接地放电点距离监测终端n的距离,当线路发生接地时,线路上会产生一个高频暂态行波,向线路两端沿线传播,t1为故障点行波到达监测终端m的时刻,t2为故障点行波到达监测终端n的时刻,两端采用高精度GPS对时可保证时刻一致,由于行波在高压输电线路中传播速度C接近于光速,因此只需记录t1、t2时刻即可求得故障点距离监测终端的距离,以下为行波测距公式:
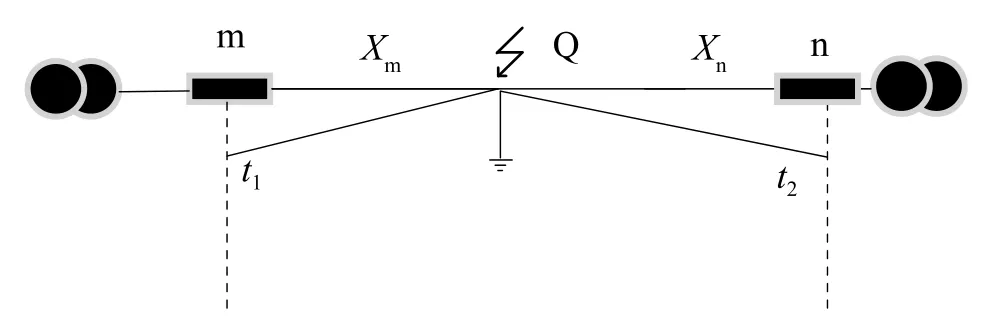
图2 D行波法故障测距原理图
近年来,随着行波法故障定位在高压输电线路上的成熟应用,行波法故障测距开始应用于牵引供电系统,由于全并联AT供电系统越来越复杂,线路结构多样化,因此针对全并联AT供电多分支供电系统,传感器的合理配置对故障测距显得极为重要。
3 配置方案及故障判定
由于接触网线路相比输电线路结构较为复杂,可安装传感器位置较少,而行波监测装置对于安装位置要求较高,因此合理的配置方案尤为重要。对于不存在分支T接的线路只需将行波监测终端安装于各所内上网线处即可完成故障测距,由于存在多段分支,T接处一般为下锚,因此,T线处不适合安装传感器,因此须通过其他手段来进行故障区间判定,以下为某铁路局一条全并联AT带分支线路故障测距方案。
3.1 线路概况
以上海局管辖某全并联AT带分支线路为例,主线牵引所至第一段AT全长约为11.236km,主线第一段AT至第二段AT全长约为10.389km,T接支线为第一段AT和第二段AT之间,全长约为4.685km。由于此线路存在T接支线,因此阻抗法故障测距精度不高,且T接支线和第一段AT距离较近,因此经常存在区间判定错误。此线路故障频发,阻抗法故障测距精度不高,因此选择此线路作为行波测距监测装置示例。
3.2 配置方案
由于各个所内存在较长的上网线,因此,行波监测传感器可安装于所内,且可实现T、F全线的故障监测,而长T接支路由于从主线直接拉锚形成T接,因此长T接支路只能将行波监测终端安装于F线上,图3为示例线路安装传感器示意图。
针对此类多分支线路为实现全线线路故障精确定位,行波监测装置安装配置图如图3所示,线路所有所内上网线上均安装行波监测装置,方向朝向所内,长支线AT分区所在F线上T接点拉出位置安装行波监测装置,以上配置可实现全线故障判定。
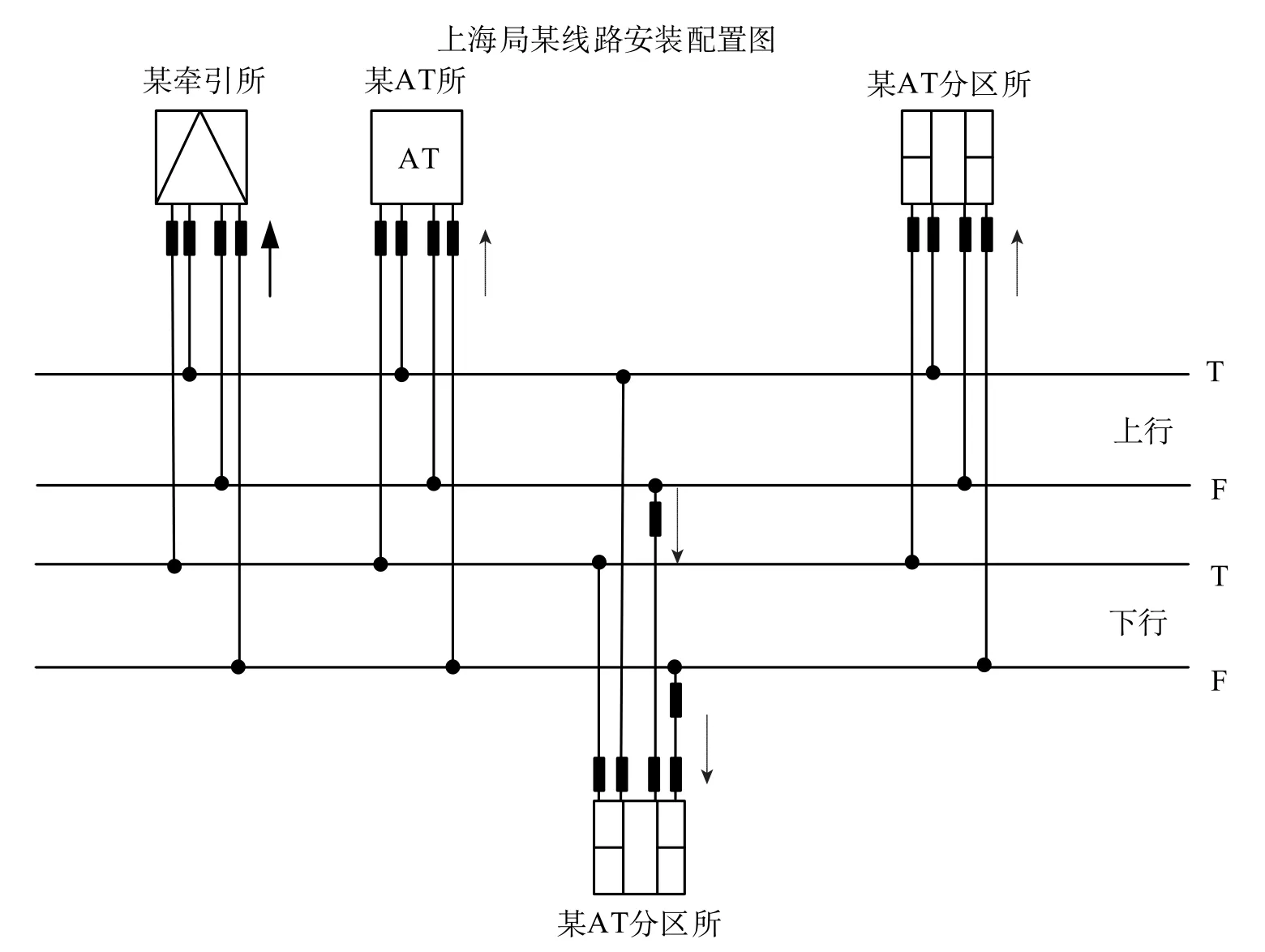
图3 上海局某全并联AT多分支安装配置图
3.3 故障判定
由于线路结构较为特殊,因此本文中只对线路单行发生故障时进行讨论,此类全并联AT供电方式,由于上行故障情况和下行故障情况时,传感器采集到的电流方向类似,因此,只考虑主线故障和支线故障的区别,以下为故障时,规定所有监测传感器朝向所内为正方向,下表为各监测终端电流方向。
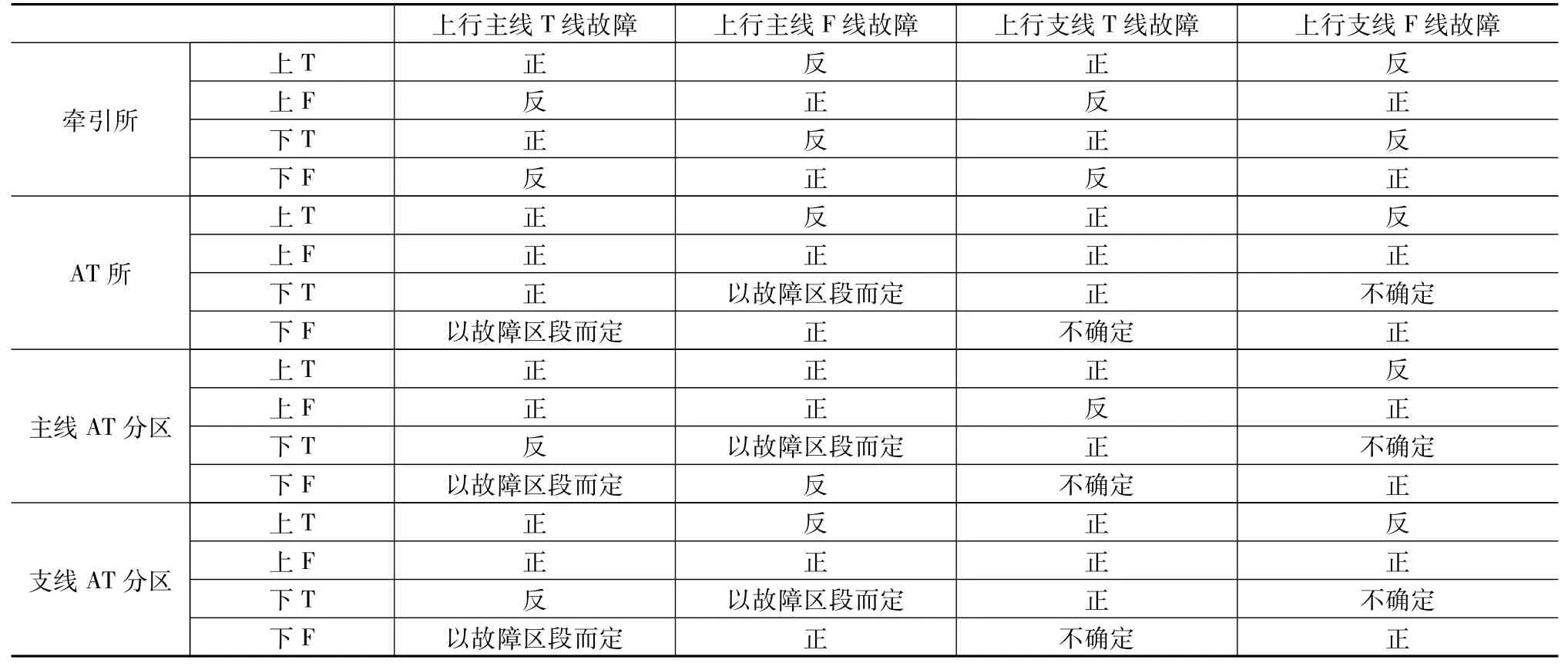
表 不同情况下故障区段故障电流方向
如上表所示,当线路发生故障时,由于规定各监测终端朝向所内为正方向,因此当上行主线T线故障时,监测终端展现出来的电流方向是不同的,由于多分支支线上T线上无法安装监测装置,因此只能用其他方法进行故障判定,在支线F线上安装监测终端可实现线路故障精确定位。当故障位于上行支线F线上时,只需通过上行F线上的两终端故障电流方向相反即可进行判定;当故障位于上行支线T线上时,此时上行T线支线由于没有条件安装监测终端,无法直接判定,通过主线上行所有T线监测故障电流为相同正方向即可判定位于上行T线,由于行波具有耦合作用可通过F线行波进行耦合判定故障是否位于主线或者支线,从而实现线路的故障精确定位。
4 故障案例
此多分支线路于2020年3月安装完毕,于2020年9月,线路电流增量保护跳闸,牵引所Ⅰ段保护,重合闸失败,故障测距距离牵引变电所13.468km,故障位于主线上,故障公里标为Kxx+xxx。线路发生跳闸后,行波监测装置启动,如图4所示,为线路上行主线T线三个所内故障时工频电流方向。
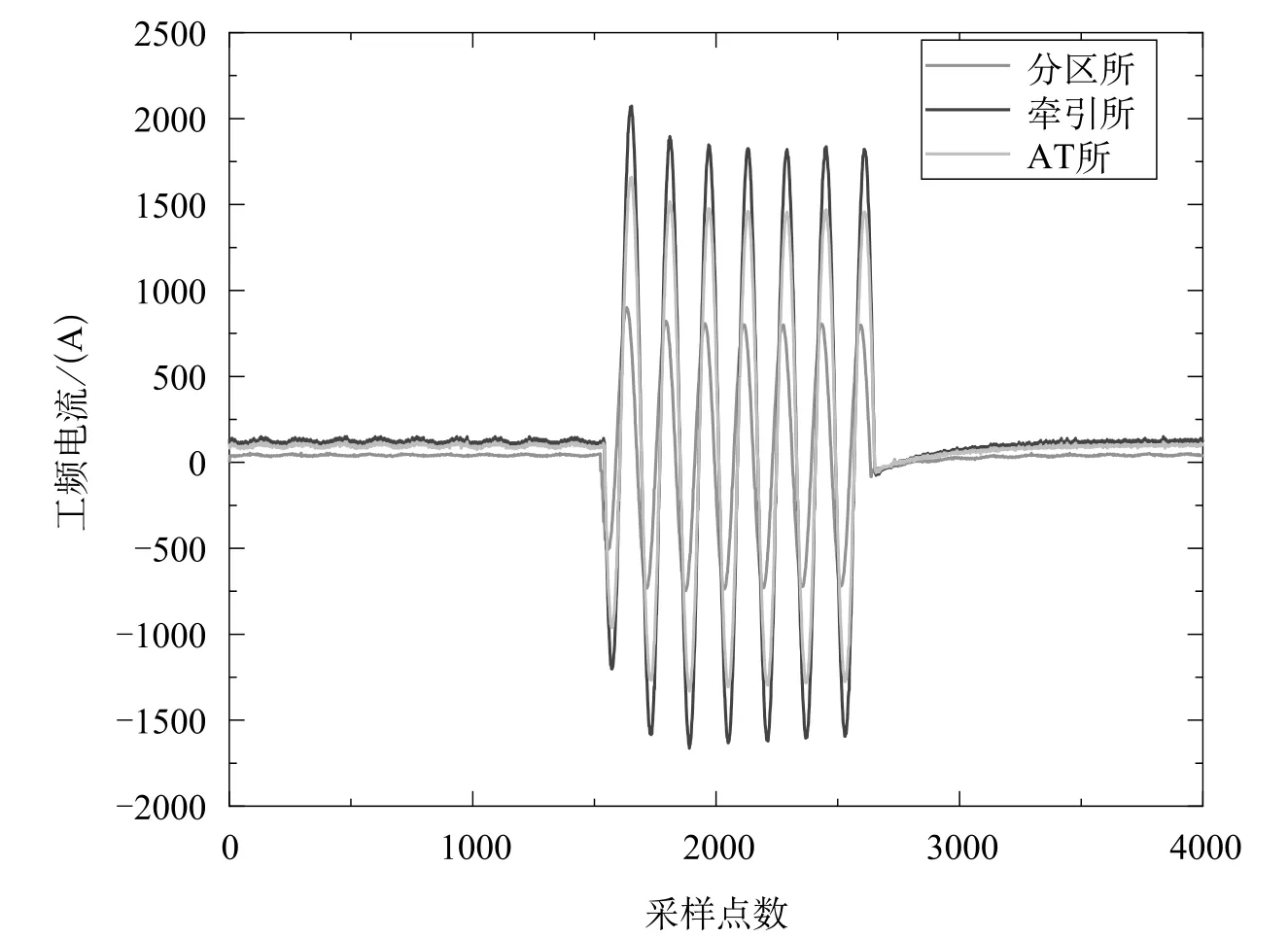
图4 上行主线T线工频故障电流
由图4对于表可知,本次故障位于上行供电臂,本次故障为T线故障,利用支线上行F线两监测终端进行故障判定,为故障距离分支末端F线2.385km,通过主线第一段AT和第二段AT进行故障判定,故障定位于支线T接点附近,因此判定故障位于分支T线,图5为行波判定过程。
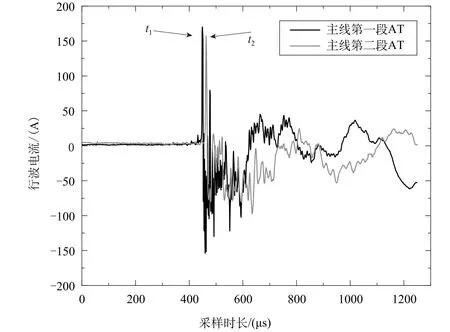
图5 上行主线T线行波电流
由图5可知,通过第一段AT和第二段AT进行计算,将t1和t2带入式(1)、(2)、(3)进行故障计算,可得出故障点位于主线T接点处,由此可判断故障为支线故障,依据行波的耦合效应,如图6所示为支线F线两终端行波电流图,通过图6可计算时间差Δt=8.2ms,可知故障点距离分支末端T线2.385km。

图6 支线F线行波电流
上海局某段某车间在收到故障测距信息后,迅速赶往现场,由于阻抗法故障测距与行波法故障测距方向不同,最后人分两波分别对此供电臂进行巡视,在主线阻抗法测距点前后1km进行故障排查,在支线行波法故障测距处进行排查,于支线T线处发现故障点,故障距离支线分区所末端2.488km发现故障点,本次故障为高阻接地故障。现场运维人员快速排除故障,减少了高铁被迫停运时间。
5 结束语
1)传统的阻抗法对于全并联AT多分支线路故障测距精度较低,线路阻抗不均匀可能导致测距区间错误。
2)合理配置传感器安装位置,可通过故障时,传感器采集到的电流方向进行故障区间判定。
3)由于行波法测距不受系统的接地过渡阻抗影响,因此,相比通过故障时电压、电流量计算出来的阻抗量,行波法测距更为准确,精度更高。
4)行波法测距具有较高的及时性和精确性,对重合闸失败线路巡线具有极高指导意义和价值,可快速恢复高铁线路的供电,减小国民经济损失,从而实现经济效益。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学杂志(2022年2期)2022-09-27
民用飞机设计与研究(2020年4期)2021-01-21
科学(2020年3期)2020-01-06
成都信息工程大学学报(2018年1期)2018-05-31
电子制作(2017年7期)2017-06-05
中国工程咨询(2017年11期)2017-01-31
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
广西科技大学学报(2015年4期)2015-02-27
太空探索(2014年1期)2014-07-10
