高效率激光无线能量传输系统闭环控制研究
2021-08-17 03:36郭陆灯赵长明王云石
激光技术 2021年5期
郭陆灯,赵长明,王云石
(北京理工大学 光电学院 光电成像技术与系统教育部重点实验室,北京 100081)
引 言
无线能量传输(wireless power transmission,WPT)作为一种“非接触式”的能量传输方式,其构想早在1890年就被伟大的物理学家尼古拉·特斯拉提出[1]。该方式摆脱了传统线缆式能量传输的束缚,使得能量传输更为灵活,极大地拓宽了应用领域。
目前WPT的主要形式包括电磁感应耦合式、电磁谐振耦合式、微波和激光等[2-4]。这些方式在传输效率、距离等方面皆有各自的优缺点,而激光和微波是公认的最佳远距离无线能量传输方式。由于激光功率密度高、方向性好和单色性好等特点,相同传输功率下其整体系统的体积和质量只需同类微波设备的10%;同时由于其频率与通信卫星没有相互干扰的风险,因此适合为飞行器、卫星和深空探测器等移动用电设备提供灵活方便、安全可靠的能量获取方式[5]。
基于上述优势,欧美等西方发达国家率先对激光无线能量传输(laser wireless power transmission,LWPT)展开了研究,其中具有代表性的工作有:2003年,美国国家航空航天局(National Aeronautics and Space Administration,NASA)首次利用输出功率500W、波长940nm的强激光对15m以外微型飞行器上的三结Ga∶In∶P2光伏电池进行照射,为微型飞行器提供了6W的电力,使其进行持续飞行时间超过了15min[6]。2009年,美国激光动力公司完成激光输能PELICAN四旋翼直升机飞行试验,创造了悬停飞行12.5h的记录[7]。2012年,该公司与洛·马公司合作,在美军特种作战部队装备的小型无人机Stalker加装激光输能系统,完成了室内和野外激光输能飞行试验,取得了里程碑成果[8],但是关于其技术细节未见报道。2017年,丰田北美研究所和加拿大安大略省渥太华大学利用激光无线能量传输系统为SiC-金属氧化物半导体场效晶体管(metal-oxide-semiconductor field-effect transistor,MOSFET)的快速开关提供了高端栅极的驱动功率[9],其中系统总的电到光到电的总效率达到了25%,采用新型的材料和结构设计的激光光伏电池的光到电转换效率达到了70%。2019年,德国的弗劳恩霍夫太阳能系统研究所的研究人员搭建了一套激光无线能量传输系统,实现了能量和数据的同时传输[10],其中在总的50W激光电源功率下,获得了最终5.5W的电输出功率,总体效率达到了11.1%,激光光伏电池的光到电的转化效率达到了51%。
相较于国外,国内研究仍处于起步阶段。其中代表性的工作有:2013年,北京理工大学HE等人设计了LWPT地面实验系统,理论分析了激光波长、光电转换材料等关键参量对传输效率的影响,分别用793nm和808nm光纤耦合LD,进行了10m LWPT实验,结果表明,以793nm激光为光源、GaAs电池的LWPT系统优势明显,激光-电的转换效率高达48%,系统总的直流到直流传输效率18%[11]。同年,HE等人又演示了高功率激光传输系统,设计了效率达42.3%的多片GaAs阵列,激光输入功率24W时可实现10W的电功率输出,测量了阵列效率对波长、激光功率和温度的关系[12]。2016年,ZHOU等人研究了高斯光束对激光电池阵列转换效率的影响,提出使用不同的光伏(photovoltaic,PV)配置减少高斯激光束引起损耗的方法[13]。
现阶段,限制LWPT系统应用的瓶颈是其较低的能量传输效率。而从上述国内研究进展可知,迄今为止对LWPT系统的研究仅局限在某个单一的能量转换环节上,从系统角度展开的研究还不多,尤其是系统核心的功率闭环控制研究基本处于空白阶段[14]。
因此围绕LWPT系统的主要能量转换环节,即包括激光光伏(laser photovoltaic,LPV)阵列及最大功率点追踪(maximum power point tracking,MPPT)实现以及储能单元智能管理等结构在内的能源管理系统,提出相应的闭环控制方案,进而提高系统整体效率,是对LWPT 技术的丰富与发展。
1 能源管理系统模型
利用MATLAB/Simulink软件搭建的能源管理系统的模型如图1所示。该模型由激光光伏阵列、降压电路、储能锂电池和智能控制模块等部分组成。智能控制模块包含MPPT模块、锂电池充电控制模块和闭环控制模块。MPPT模块利用扰动观察法实现;锂电池充电控制模块采用了多阶段恒流充电策略;闭环控制模块将充电所需能量和激光光伏阵列接收到的激光能量联系起来,做到“按需索要”,大大减少能量浪费。激光光伏阵列、降压电路、储能锂电池模块和智能控制模块将在下面展开详细论述。图中,PWM(pulse width modulation)表示脉冲宽度调制。
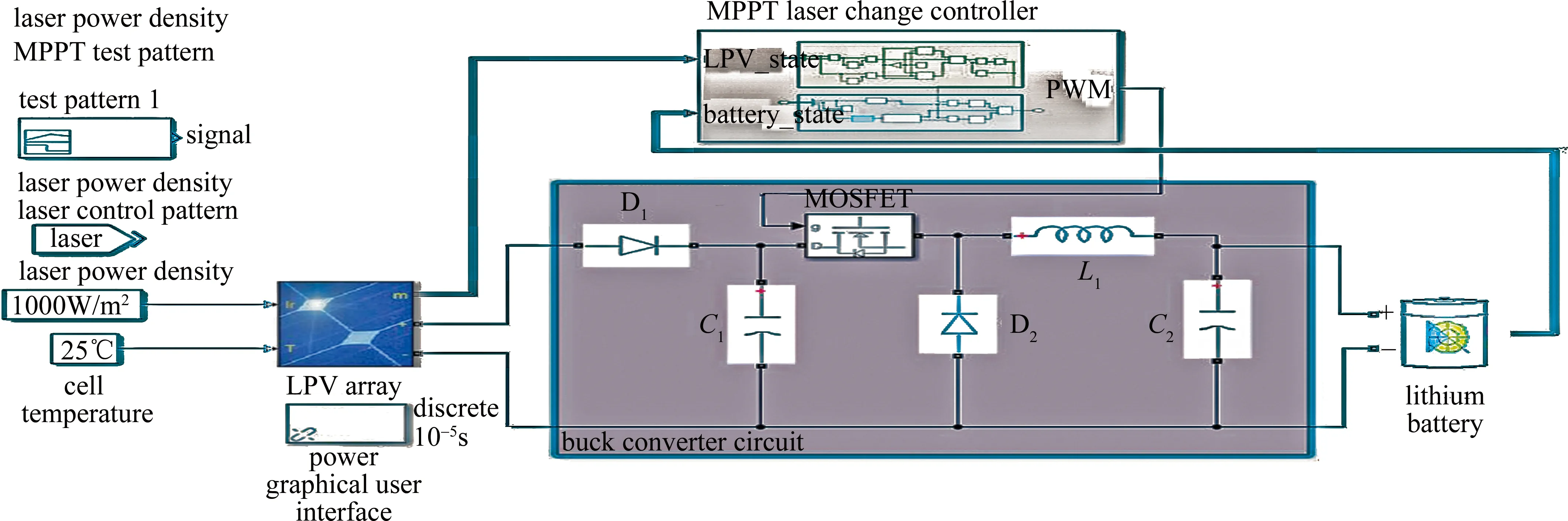
Fig.1 Simulation model of energy management system
1.1 MPPT算法及实现
光伏电池的输出特性不仅与其内部结构相关,还会受到负载的大小、温度的高低、光照的强弱等外部环境的影响,见图2[15]和图3。由图2可知,温度对于某一特定入射激光功率密度下激光光伏电池的影响主要体现在随着温度的升高其开路电压和最大功率点处功率、工作电压等参量线性下降,其原因是温度升高使得光伏电池的禁带宽度变窄,耗尽层复合率增加,输出电压下降。因此在激光光伏电池工作时,要保持其工作温度的稳定性,避免因温度过高而造成的功率损失。而由图3可知,激光光伏电池的短路电流和最大功率点处的工作电流受温度影响不大,而是由入射激光功率密度所决定的。在不同外界条件下,光伏电池对应着不同的最大功率点,因此,使光伏系统始终保持最大功率输出的控制方法称为MPPT。常用的MPPT算法有开环控制的电压跟踪法、插值计算法等,以及闭环控制的扰动观察法(perturbation and observation,P&O)、电导增量法(incremental conductance,INC)、粒子群算法(particle swarm optimization,PSO)及模糊控制算法(fuzzy control,FC)等[16]。
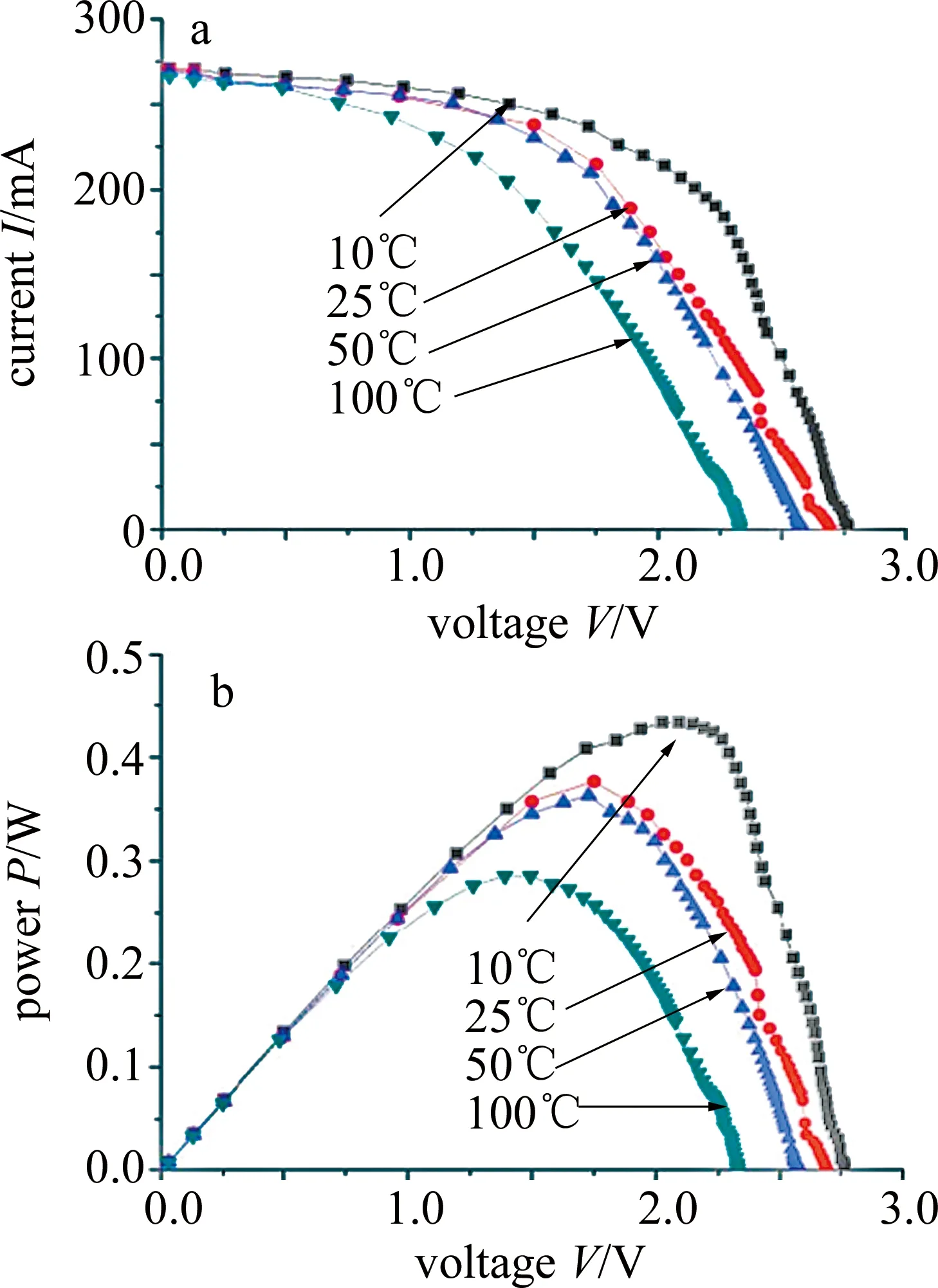
Fig.2 I-V and P-V curves of monolithic laser photovoltaic cell at different temperatures
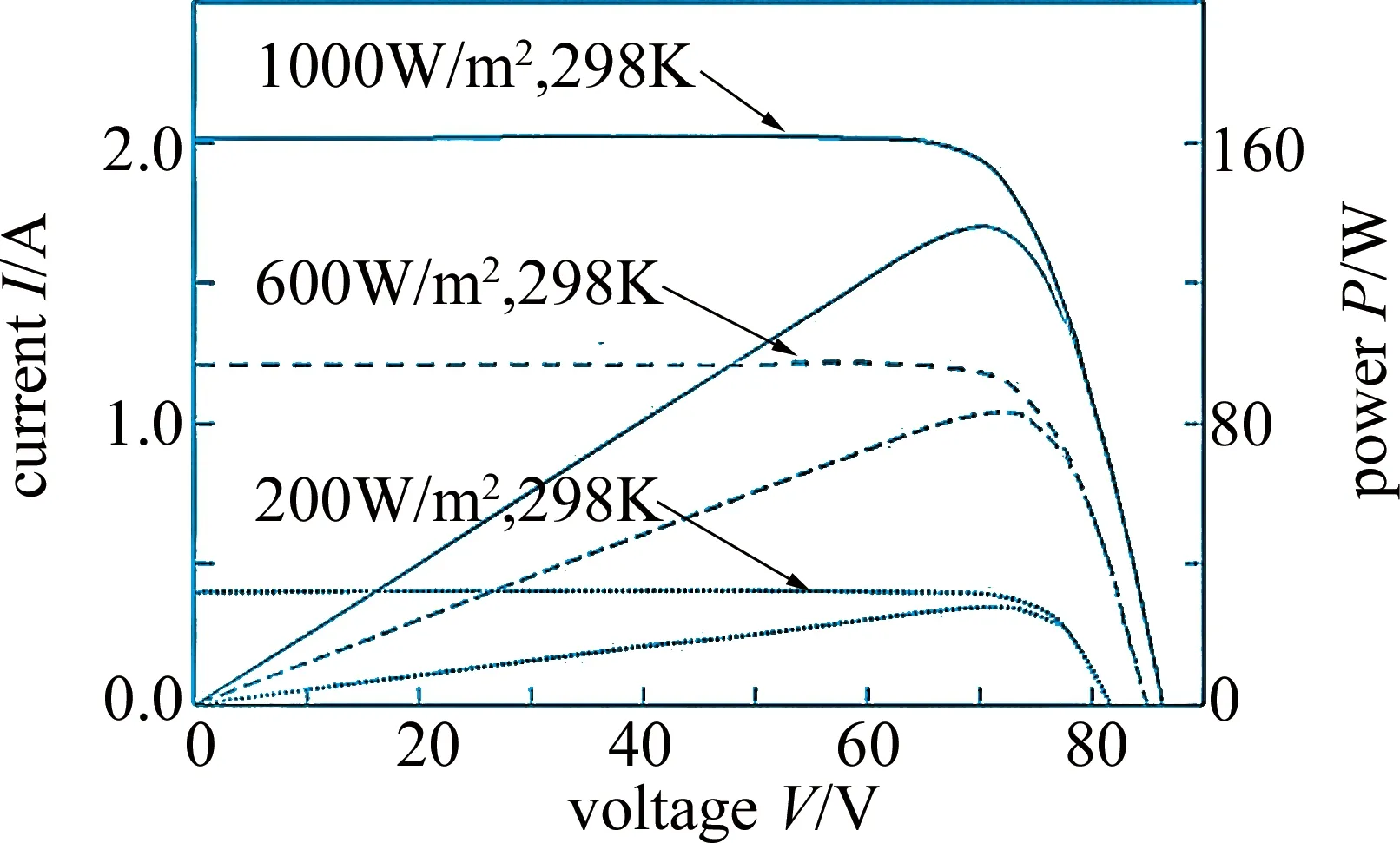
Fig.3 Laser photovoltaic array output under different laser power densities at 25℃
本文中利用P&O算法实现MPPT,将追踪到的最大功率点对应的占空比D通过PWM生成器产生控制MOSFET管的开关信号,最后通过降压电路实现MPPT[17]。
P&O算法的原理是通过改变开关信号的占空比使激光光伏阵列的输出电压发生改变,根据改变后光伏阵列输出功率的变化决定下一步占空比改变方向来实现功率最大化[18]。该控制算法仅需采样激光光伏阵列的输出电压和输出电流值,算法复杂度低,易于实现,从而多为工程采用,其算法流程见图4。图中K表示迭代次数。
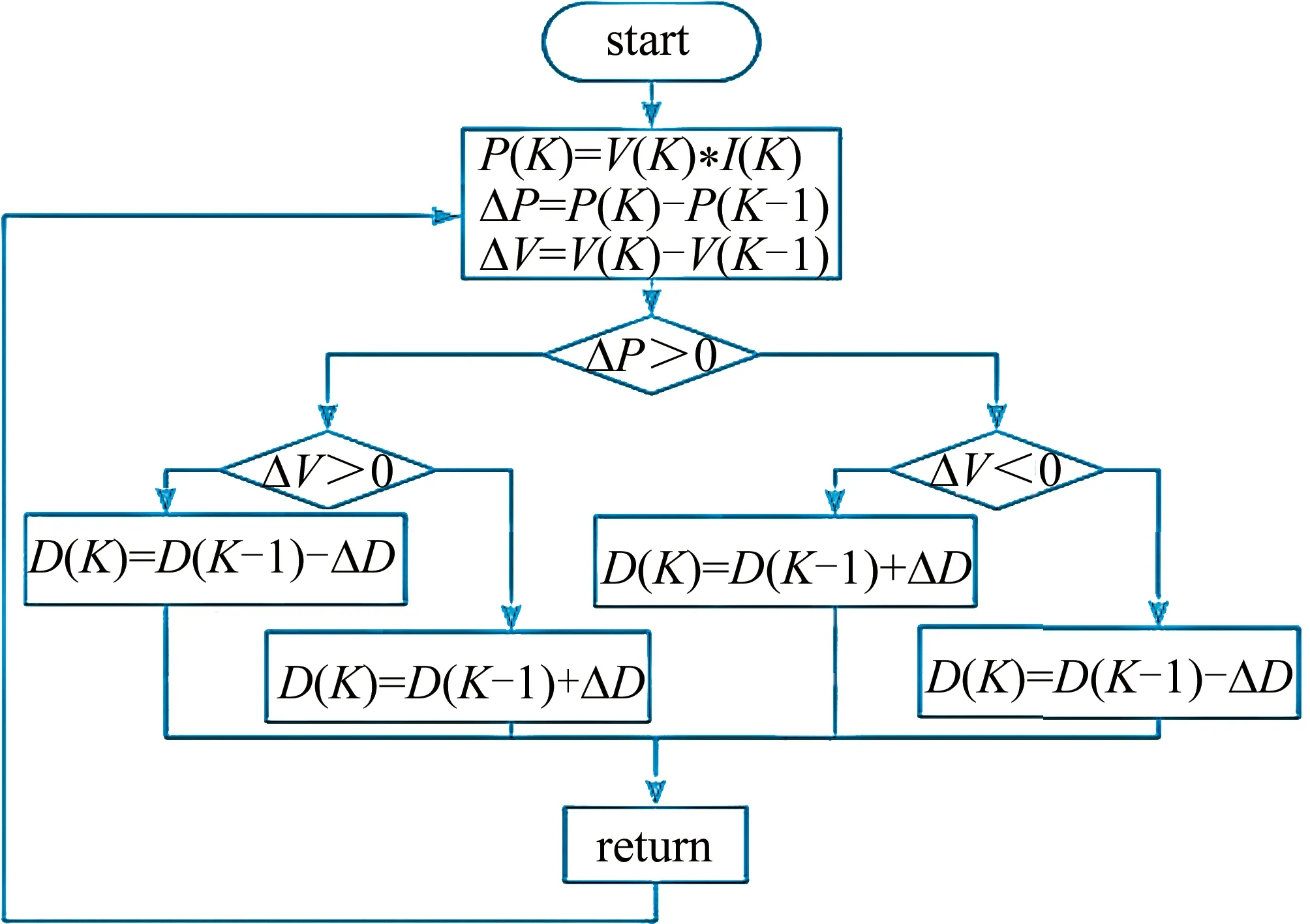
Fig.4 P&O algorithm flow chart
P&O算法模型在Simulink软件中利用相应的模块搭建,详情可见图5。
用来实现激光光伏阵列MPPT[19-21]算法的电路拓扑结构主要有降压型(buck)、升压型(boost)和升降压型(buck-boost)[22-23]等。基于电路损耗方面考虑,buck电路拓扑结构用以实现输入端的高电压和低电流输入,输出端低电压和大电流的输出,即减小流经buck电路中的电流值,从而减少电路结构中的各种阻性器件的电流热效应损耗[24]。因此本文中选用buck电路拓扑结构来实现激光光伏阵列的MPPT,其电路模型结构见图1。该电路包含一个MOSFET功率开关管,一个高电感值的电感,两个防止电流反向流通的二极管,输入输出端的两个电容。当MOSFET管在不同的开关状态下对应的电路拓扑结构如图6所示。
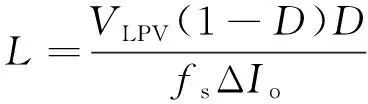
buck电路中的电感L和电容C的取值取决于下面两个公式:
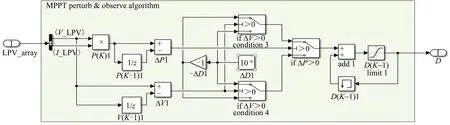
Fig.5 P&O algorithm simulation model
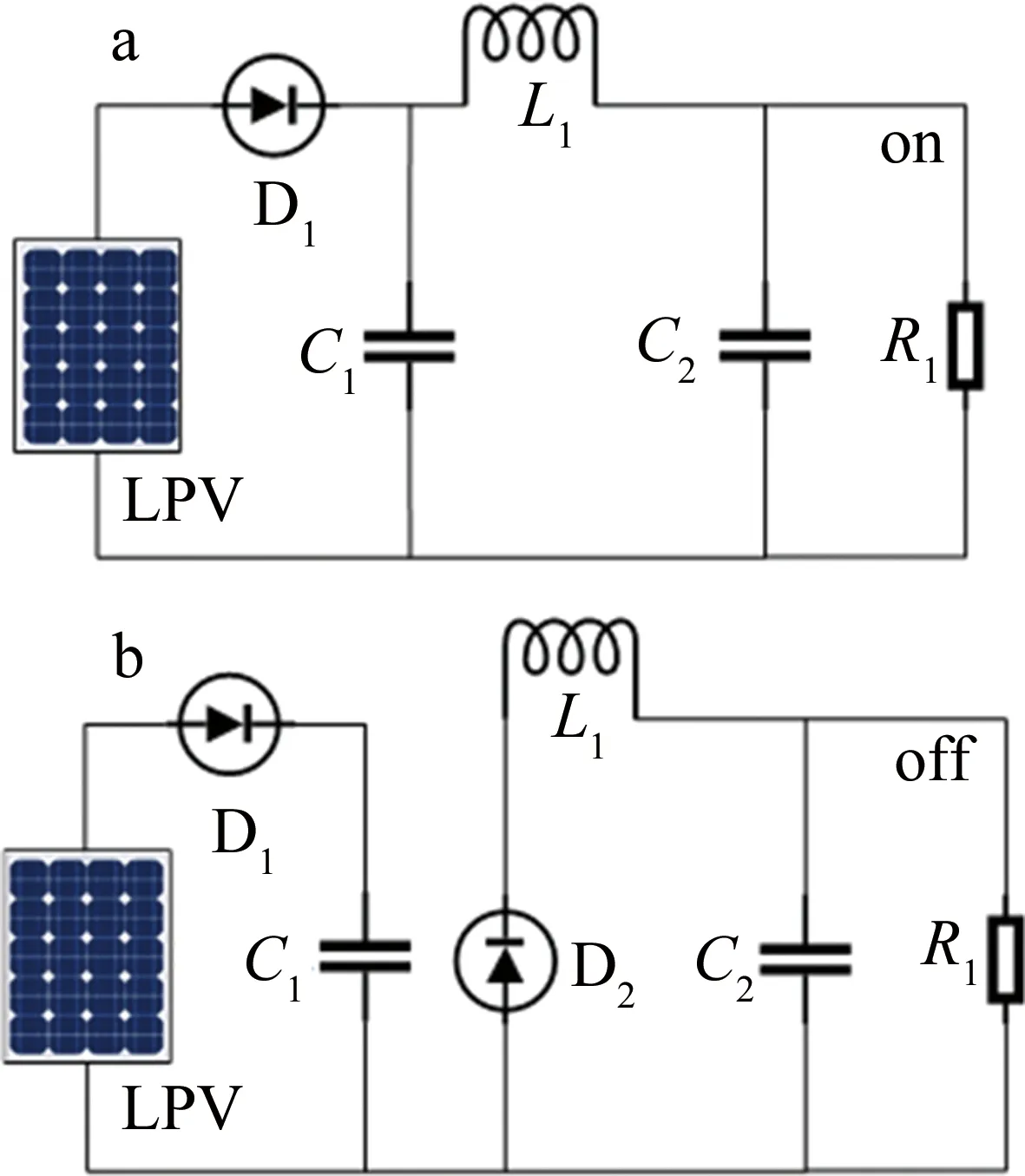
Fig.6 Equivalent circuit diagram of MOS switch on and off
(1)
(2)
式中,ΔIo为输出电流Io的纹波电流;fs=1/T,为开关频率,T为周期时间;ΔVo为输出电压Vo的纹波电压;VLPV为激光光伏电压。
通过(1)式和(2)式确定ΔIo、ΔVo和开关频率fs,即可根据输出电压和输出电流的具体需求计算电感和电容的取值。
1.2 锂电池充电控制算法模块
锂电池充电控制算法模块采用了多阶段恒流充电策略,旨在优化恒流恒压充电策略中恒压阶段,减少充电时间。充电过程示意图如图7所示。
在充电初始阶段,锂电池充电接受能力强,此时用高倍率恒流充电,等达到设定条件,结束该阶段充电。然后逐阶段减小充电电流重复上述步骤直至充电结束[25]。常用的充电设定条件有电池剩余电量(state of charge,SOC)和电池端电压两种,出于安全性和算法简化考虑,本文中采取锂电池端电压作为各阶段充电截止条件,以达到预定SOC作为结束充电标志。
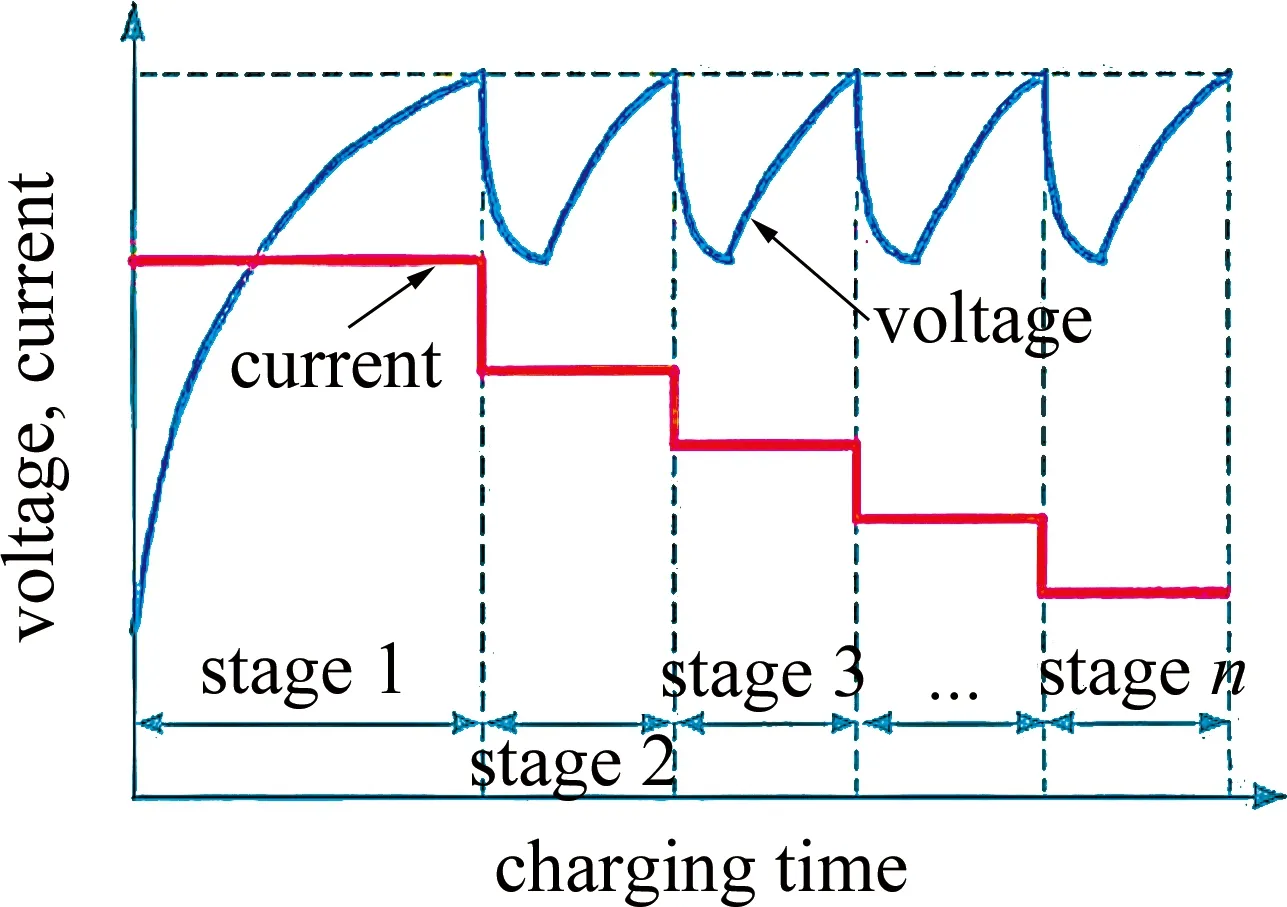
Fig.7 Schematic diagram of current and voltage changes in multi-stage constant current charging
图8为按照上述算法搭建的仿真模型。该模型的两个输入分别为MPPT模块输出的占空比信号和锂电池的实时状态信息,SOC状态、电流和端电压;其输出为控制buck电路中MOS开关管所需的PWM信号。模型中的float condition模块用作监测锂电池SOC状态,基于安全考虑,将99.8%SOC作为充电结束标志,cutoff voltage模块用作监测锂电池端电压是否达到截止电压56V,其输入信号为锂电池的实时端电压值;其输出是达到条件的次数,即多阶段恒流充电的阶段次序,开始时输出0,表示第一阶段是MPPT模式下PWM输出。multi_condition switch模块的输入为阶段次序,用作判断多阶段恒流充电状态。两个输出是:(1)内部的比例-积分-微分(proportional-integral-differential,PID)电流环依据输入端的实时电流值计算出的占空比信号D;(2)MPPT模式和多阶段恒流充电模式切换信号judgement signal。图中,DC(direct current)表示直流,CC(constant current)表示恒流。
1.3 新型激光闭环控制多阶段恒流充电模块
目前绝大多数的LWPT系统都是开环系统,在不同负载条件下,很难保证激光器光能输出和激光光伏阵列后续电能消耗得到充分匹配,从而造成了极大的浪费[14]。因此,作者基于激光光伏阵列的输出特点和锂电池的多阶段恒流充电方法提出了一种激光闭环控制方法。
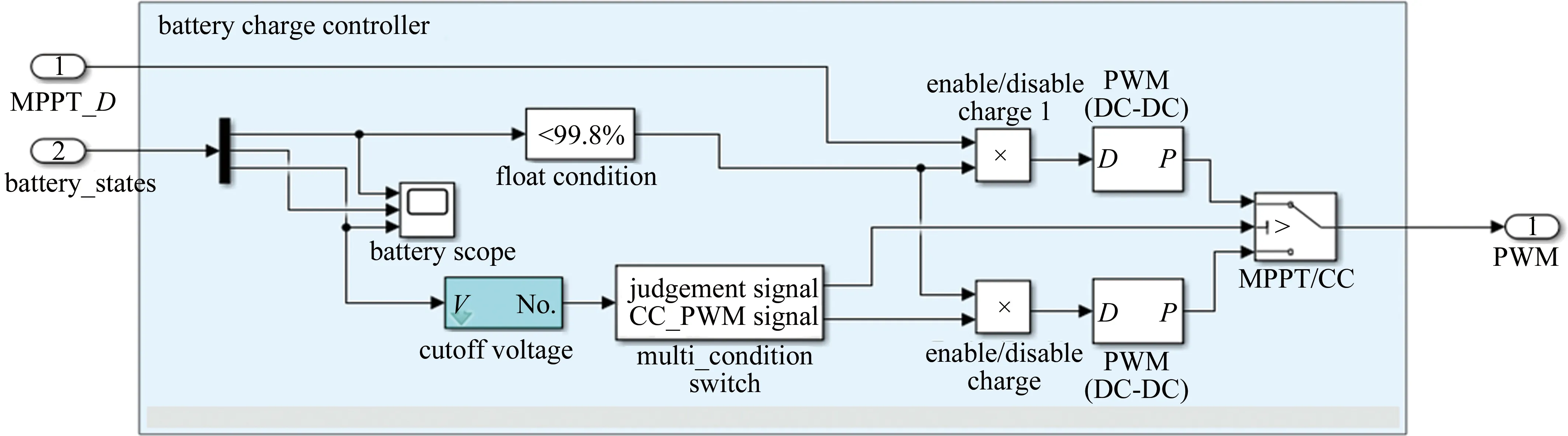
Fig.8 Multi-stage constant current charging simulation model
由图3中激光光伏阵列在温度25℃下不同激光功率密度照射输出的I-V和P-V曲线可知,在阵列输出未达到最大功率点之前,其输出电流基本保持恒定;不同光照下阵列最大功率不同,但其不同最大功率点处电压变化幅度很小,不同的最大输出功率取决于不同的输出电流。
如图7所示,结合锂电池的多阶段恒流充电方法,若是将充电阶段细分为多个阶段,则每个阶段的端电压变化幅度很小,因此,可以将每个阶段的充电过程近似为恒定功率充电[26]。
在所搭建的能源管理系统模型中,锂电池多阶段恒流充电过程中每阶段所需的电能由激光光伏阵列提供;而激光光伏阵列所提供的电能多少则是由其接收到的激光功率密度的值来决定。因此,可将锂电池多阶段恒流充电方法中每阶段所需的电能和激光光伏阵列接收到的激光功率密度值对应起来,即根据锂电池充电所需电能多少来对激光光伏阵列需要的激光功率密度进行调节,从而实现了系统的闭环控制。
基于上述论据,本文中搭建了如图9所示的基于激光闭环控制的新型锂电池多阶段恒流充电仿真模型。相较于图8中传统锂电池多阶段恒流充电仿真模型,用对应的激光功率密度信号将multi_condition switch模块及其后续需要的配套模块取代,简化了控制结构,并且实现了激光输出端光能和激光光伏阵列后续消耗电能的闭环控制,减少了能量浪费,提升了激光无线能量传输系统的总体效率。
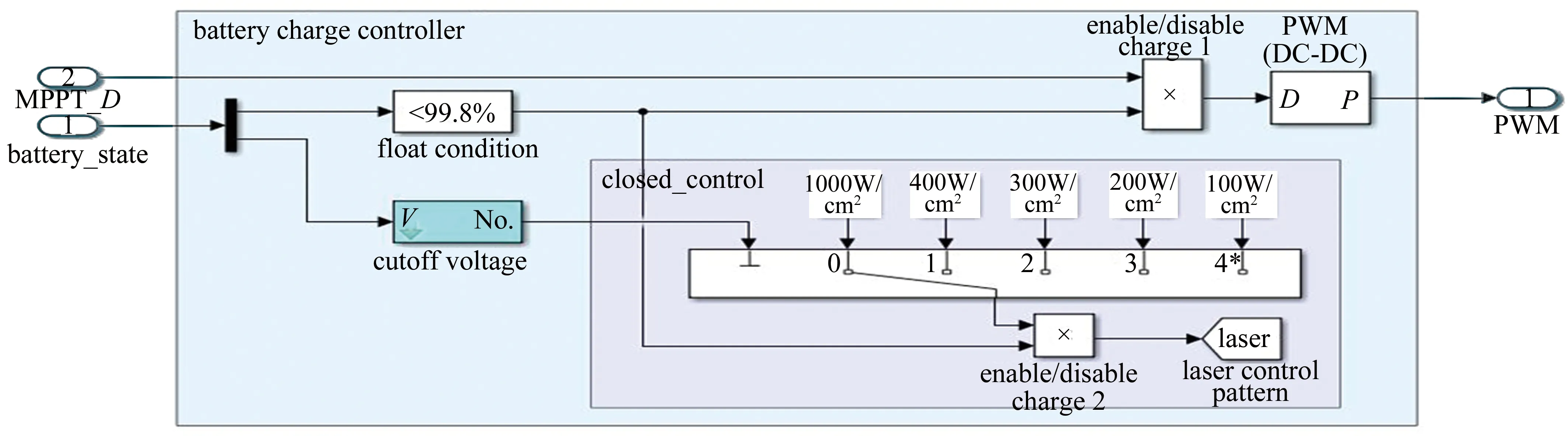
Fig.9 Laser closed-loop control new multi-stage constant current charging simulation model
2 仿真结果及讨论
作者在MATLAB/Simulink仿真环境下搭建了激光无线能量传输系统的子系统——能源管理系统,并通过该模型验证分析了系统仿真结果。系统仿真结果分为以下3个方面详细讨论:MPPT模块、锂电池的多阶段恒流充电模块和闭环控制模块的各自执行效果。
2.1 MPPT算法结果仿真结果
该模型中的激光光伏阵列是基于商用模块设置的,该阵列由两串并联,其中每串由4个模块串联而成,单个模块在标准激光功率密度1000W/m2照射下最大功率点电压为30.9V,电流为8.1A,开路电压为36.6V,短路电流为8.75A,最大功率250.29W,可知阵列总功率为2kW。模块温度设置为25℃。MPPT扰动步长ΔD设置为10-6。为验证P&O算法在激光功率密度发生突变时对激光光伏阵列最大功率点的MPPT追踪效果,将入射的激光功率密度信号设置为如图10a所示,仿真结果见图10b。
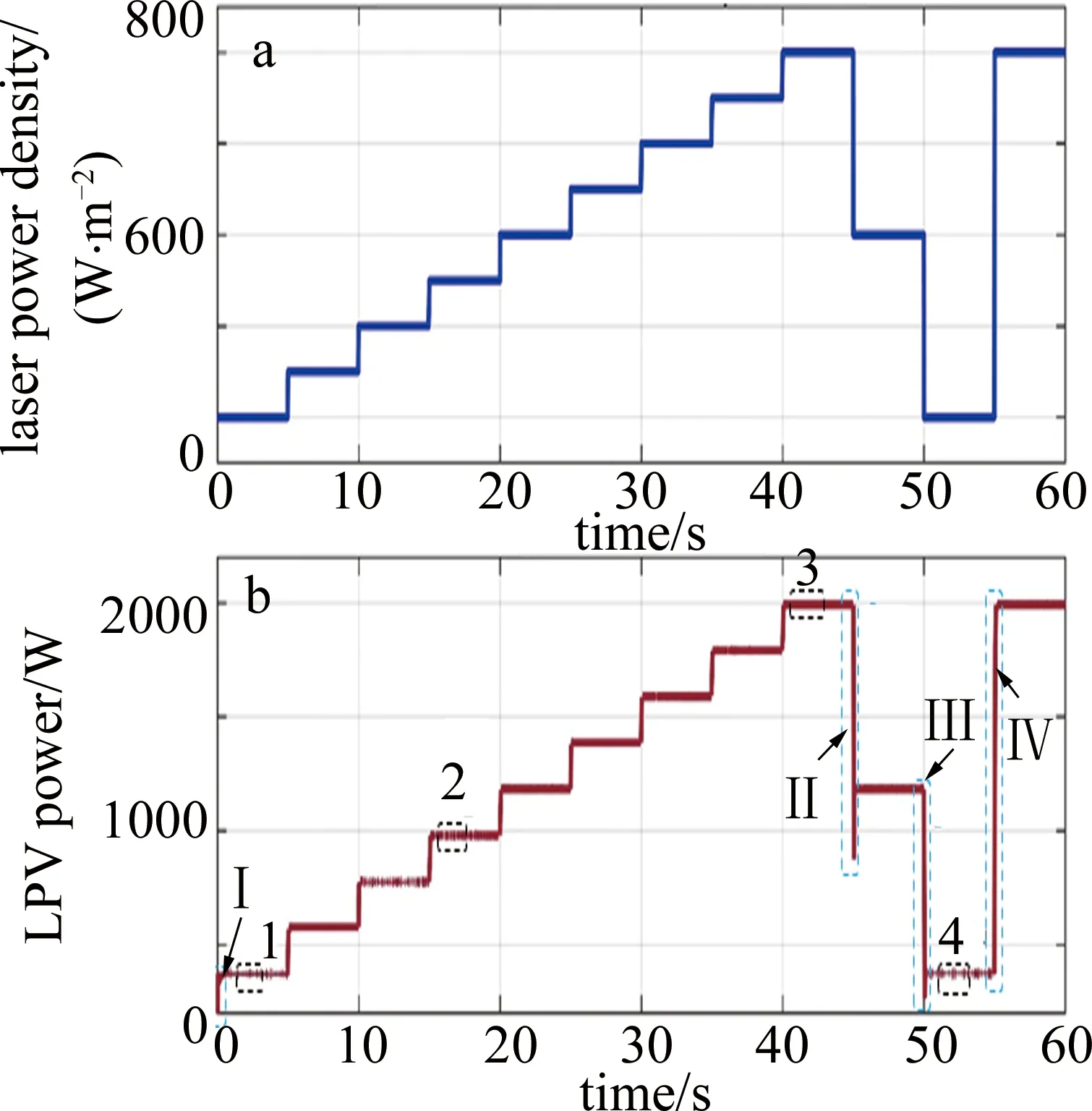
Fig.10 P&O algorithm MPPT tracking effect diagram
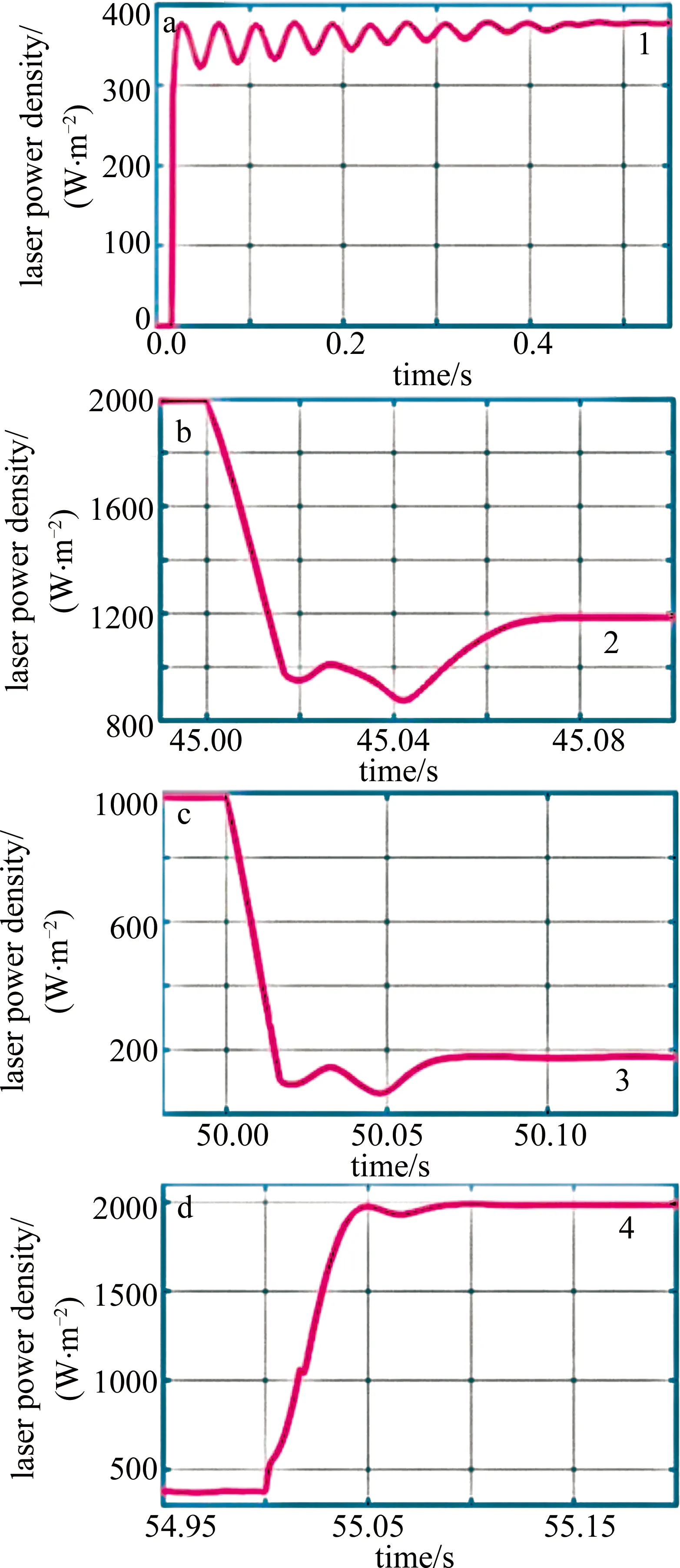
Fig.11 P&O algorithm MPPT tracking effect annotation details (1,2,3,4 in Fig.10)
从图10可知,每种激光功率密度下都可以实现追踪效果。从图11可知,其中启动时完成追踪用时最久,但时长小于0.5s,特别是激光功率密度信号有极大突变时其追踪完成时间也为超过0.1s。从图12可知,其中在启动时最大功率点处扰动值最大,其扰动范围约为8W,其总功率占比约2.15%,扰动值最小时仅为1W,总功率占比仅约0.5%。图13为不同激光功率密度下激光光伏阵列运行在MPPT模式时的转换效率图。可知在不同的激光功率密度下其转换效率变化幅度很小,保证了MPPT的有效性。
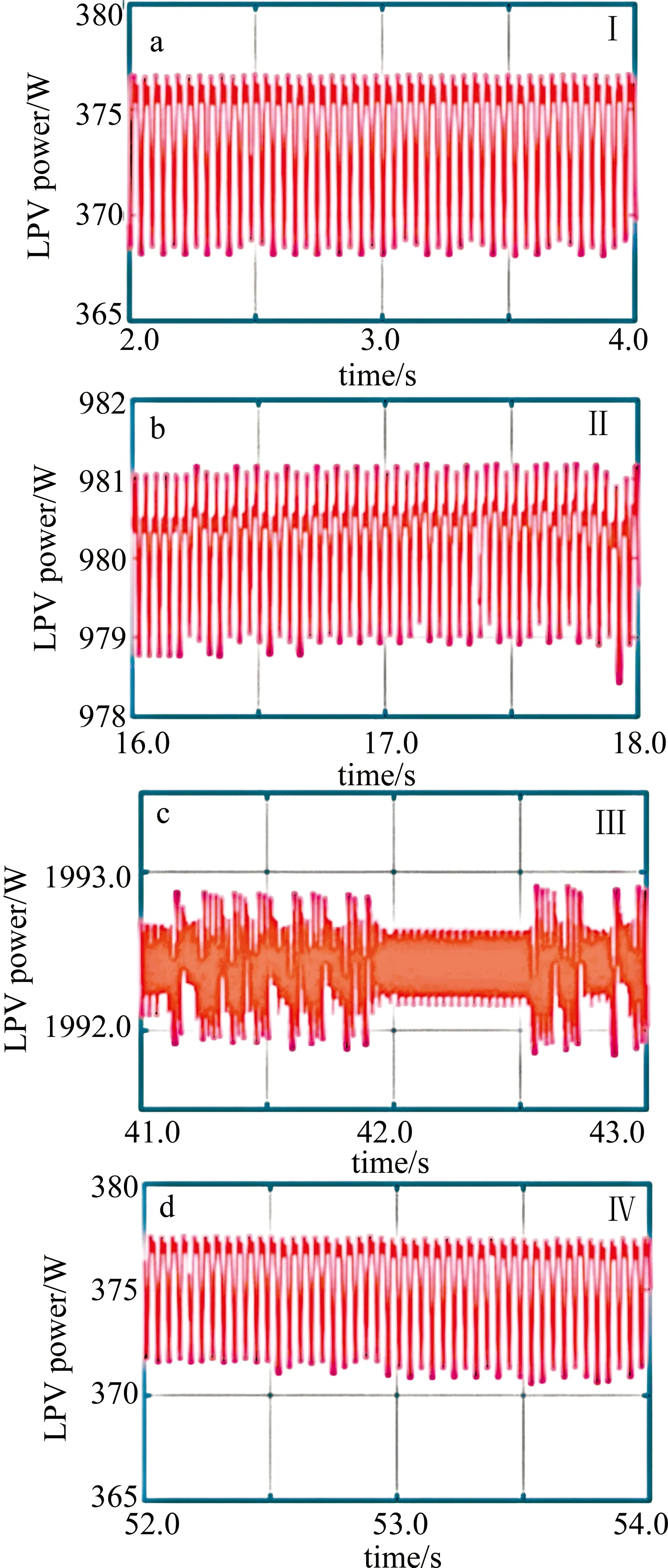
Fig.12 P&O algorithm MPPT stabilization effect annotation details (Ⅰ,Ⅱ,Ⅲ,Ⅳ in Fig. 10)
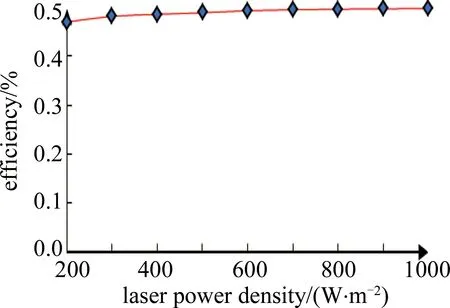
Fig.13 Conversion efficiency graph of laser photovoltaic array under different laser power densities
2.2 锂电池充电算法控制模块仿真结果
锂电池的多阶段恒流充电是通过按照MPPT时的大电流充电,接下来通过PID电流环的控制,在每次达到充电截止电压后依次减小电流的方式对锂电池电池充电。仿真环境参量设置如表1所示。
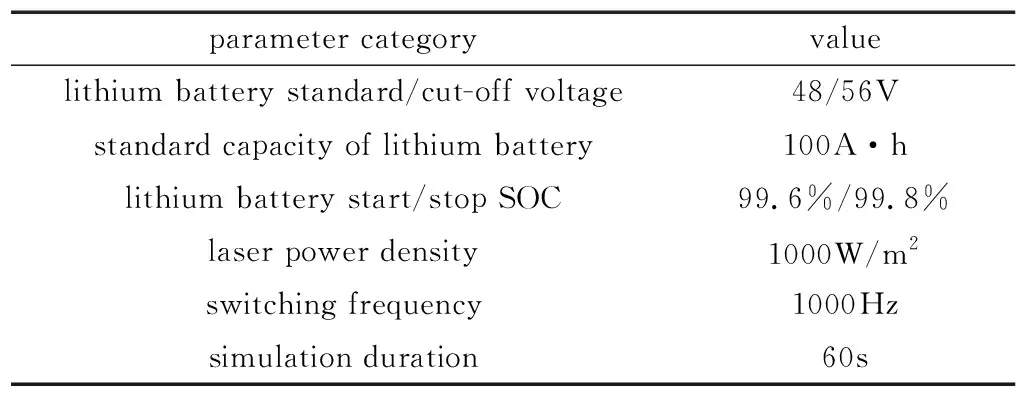
Table 1 Simulation environment parameter settings
传统锂电池多阶段恒流充电模块性能如图14所示。可知在第一阶段即MPPT模式下充电电流约为35A,在约6s时第1次达到充电截止电压;第二阶段约从5s持续到16s,此阶段开始后,激光光伏阵列不再运行在MPPT模式下,其输出受锂电池多阶段恒流充电模块内的PID电流环控制,此时充电电流为15A,锂电池SOC状态增长变缓;第三阶段约从16s持续到48s,充电电流为10A。该电流值下锂电池端电压呈现出先下降后上升的趋势,这是因为充电速率为10A·h,此阶段开始进入涓流充电状态,但锂电池SOC状态仍在缓慢增长;第四阶段约从48s持续到57s,充电电流为5A。此阶段下锂电池端电压状态和锂电池SOC状态较第三阶段变化更为缓慢,并在57s时由于锂电池SOC状态达到设定值后结束;最后进入充电截止阶段,此时充电结束,充电电流强行置零,锂电池端电压由于“浮充”特性,开始恢复到实际电压值,锂电池SOC状态保持在设定值99.8%不变,完成设定充电过程。
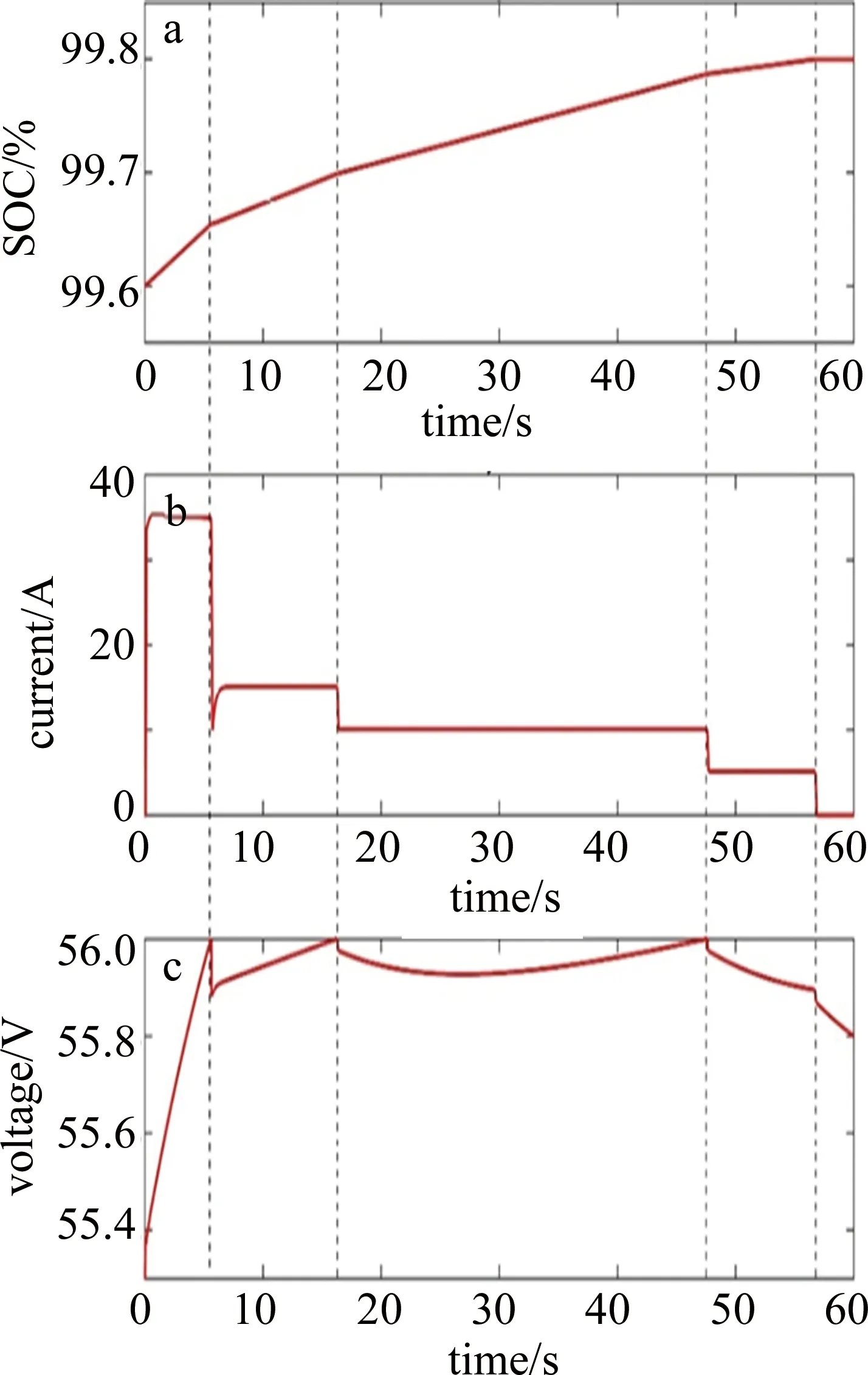
Fig.14 Effect of multi-stage constant current charging method for lithium battery
2.3 闭环控制模块仿真结果
该模块运行环境中,基于闭环控制除激光功率密度信号外其余参量设置均与传统锂电池多阶段恒流充电模块保持一致,从图15中的结果可知:通过该闭环控制模块可以高度复现传统方法的充电效果。为了验证闭环控制的优势,将两次仿真过程中的激光功率密度信号、激光光伏阵列输出功率以及锂电池充电功率按时间积分后求出其总量进行对比。将利用Simulink中的积分模块得到的值列于表2中,其中激光光伏阵列MPPT输出由图10中不同激光功率密度下MPPT输出功率计算得来。
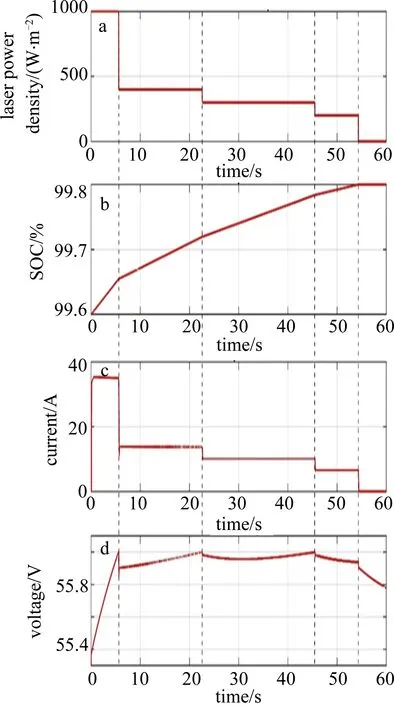
Fig.15 Lithium battery charging effect in closed loop control mode
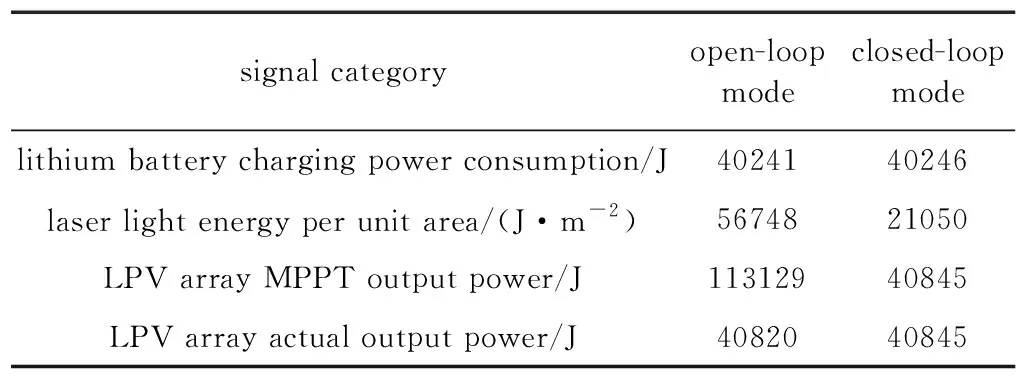
Table 2 Total amount of signal integration in simulation results
由表2中数据知:在给锂电池完成同等电能充电的情况下,相较于传统式开环模式,本文中提出的闭环控制可减少62.9%的光能浪费;从系统转换效率(锂电池充电耗电量/激光光伏阵列MPPT输出电量)的角度考虑,开环模式下效率仅为35.57%,闭环模式下效率高达98.53%,提高了62.96%。以上数据充分说明了本文中提出的闭环控制模式的高效性。
3 结 论
通过仿真结果表明,所采用的 P&O算法在实现了激光光伏阵列MPPT的同时,其追踪时长少于0.5s,最大功率点处功率扰动低于2.15%。相较于开环式激光无线能量传输系统,本文中提出的闭环控制模式不仅能够复现其充电效果,且节省了约62.9%的光能,系统转换效率提高了62.96%。需要强调的是,此结果仅为60s内充电阶段得出,若是在锂电池充电的全过程中采用本文中提出的闭环控制模式,则能够节约更多光能,极大地提升激光无线能量传输的整体效率。之所以有如此大的性能提升,是因为传统开环式激光无线能量传输系统大多借鉴太阳能光伏充电系统的经验模式,将激光光能设定为等同于不可人工操控的太阳能,只在运行初期锂电池充电接受能力强时使光伏阵列运行在MPPT模式下,之后由于脱离了MPPT模式而造成了激光光能的浪费。本文中将激光光能视为可控因素,从而配合用电消耗形成闭环控制模式,使激光光伏阵列全程运行在MPPT模式下,减少了光能的浪费,从而大幅度地提升了总体系统转换效率。同时需要指出的是:对比国外研究成果,仅针对激光光伏电池光到电的转换效率,本文中仿真结果49.1%并未有所突破;但针对作者提出的闭环控制的新型多阶段充电方法而言,仍是有效提高系统总体效率的手段。另外值得关注的是,相较于国内研究单位大多针对器件性能优化和整体系统仿真验证的现状而言,国外的研究系统化成熟度很高,且趋向于多方面的应用和商业化发展。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
测控技术(2018年1期)2018-11-25
电子制作(2018年17期)2018-09-28
电子制作(2018年11期)2018-08-04
电测与仪表(2015年3期)2015-04-09
电机与控制应用(2015年7期)2015-03-01
电子设计工程(2015年12期)2015-02-27
电子设计工程(2015年6期)2015-02-27