基于消费级无人机倾斜影像的高精度裸眼三维测图方法研究
2021-08-17 02:09丁莹莹
山东国土资源 2021年8期
丁莹莹
(山东省国土测绘院,山东 济南 250102)
0 引言
基于倾斜摄影的实景三维建模技术[1-4]是在继承传统数字正射影像立体建模技术的基础上,运用更先进的定位、融合和建模技术,将地物表征纹理自动贴合到三维模型上,达到测绘级量测精度[5-7]。在农村区域开展房地一体化测量任务时,采用传统的测绘方法,存在很多弊端,比如测量工作量大、农村区域入户难等问题。倾斜摄影测量技术能够真实地反映地物现状[8-9],加之当前三维建模成本大幅降低,并能提供一系列的地物信息,将消费级无人机倾斜摄影技术、自动实景三维建模技术和裸眼立体测图技术相结合,创新性的提出了一套房地一体化测量技术路线,能够极大提高内业采集效率,有效减少外业调绘工作量。本文在详细介绍这一全新技术路线实现基础上,阐述了裸眼立体测图原理[10-11],试验了基于无人机多种航摄方案下裸眼立体测图数据精度,并给出了进一步提高测图精度的合理化建议。
1 裸眼三维测图原理
裸眼三维测图是基于裸眼三维技术[12],脱离开立体眼镜直接在实景三维模型上展现地物形态并完成地物特征采集。采用这种作业模式,一方面能够在内业采集到大量普通正射影像上被遮挡的地物信息,有效减少了外业工作量;另一方面降低了作业人员进入立体测图领域的能力限制。实际作业时,借助专业软件加载实景三维模型数据,基于实景三维模型上绘制数字线划图,真正做到裸眼三维测图。
1.1 实景三维模型数据加载
(1)OSBG数据转换:以EPS作业平台作为试验对象,该平台能加载倾斜摄影生成的实景三维模型,支持海量数据的快速浏览、二三维的多窗口联动,并对二三维联动数据进行同步测图[13-14]。通过建立索引文件,对Context Capture Center等三维模型软件处理后的模型进行加载,选择三维测图的OSDB数据转换模块,导出倾斜摄影提供的data数据和metadata.xml数据,并由倾斜影像中提取密集点云生成数字表面模型(DSM)数据。
(2)本地模型加载:将上个步骤生成的DSM文件作为本地模型加载到EPS作业平台中,作为基于实景三维模型的裸眼三维测图的基底模型数据。
1.2 裸眼三维测图流程
基于EPS作业平台实现裸眼三维测图流程如图1所示。

图1 EPS裸眼三维测图流程图
2 试验方案设计与实施
2.1 试验区概况
选择寿光市饮马村作为试验区,面积约0.15km2,有300余户居民,村貌良好,宅基地户型较一般村庄复杂,多为两层建筑,户与户之间间隔较近,连户房、檐廊较多。
2.2 试验方案设计
基于消费级无人机搭载倾斜相机,获取农村居民点高分辨率影像,利用Smart 3D软件进行空三加密,利用Context Capture Center集群式软件处理得到实景三维模型[15],在测绘专业平台下基于实景三维模型采集大比例尺数字线划图(DLG)数据,并对空间加密和测图成果精度进行外业实测对比分析。
(1)航摄方案:本次试验采用三种设计方案,飞行平台采用大疆经纬M600PRO多旋翼无人机飞行平台[16],选用乐泰C-5五镜头倾斜摄影数码相机进行影像数据采集,单镜头有效像素不低于2400万,航摄时旁向重叠度85%,航向重叠度85%。航空摄影方案设计如表1所示。
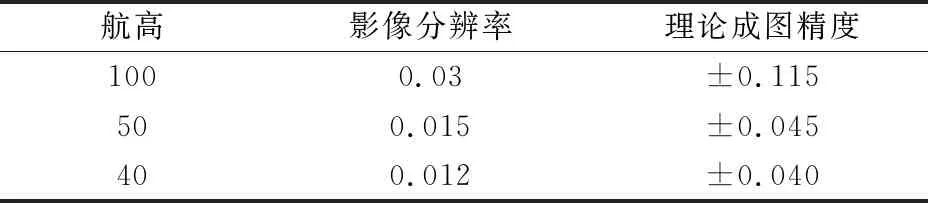
表1 影像分辨率与成图精度对照单位:m
(2)像控点布设原则:像控点采用“L”型设计,布设于村庄主路面,间距约100m,大小约20cm,不能有明显地物遮挡,保证五个方向的照片均可见。外业基于山东省卫星定位连续运行综合应用服务系统(SDCORS)的网络RTK技术进行像控点外业坐标采集,用于内业精度检核[17]。
(3)空三加密:在Smart 3D软件下对倾斜影像进行空三加密,相对定向精度应优于1个像素,绝对定向精度平面精度应优于1cm,高程精度应优于3cm。
(4)实景三维模型制作:基于航摄获取的倾斜影像,利用Context Capture Center系统完成三维模型自动构建。经过影像同名点匹配、特征点点云提取、构TIN生成白模、实景纹理自动映射等工序,最终生成实景三维场景。
2.3 基于实景三维模型的地形图采集
基于EPS作业平台进行数据处理,主要包括数据转换、模型加载、数据采集检查以及数据导出等。分别对房屋、道路、植被、其他要素等进行绘制。
(1)房屋采集:一种是采用房角采集模式,通过采集房屋的每个拐角点,完成房屋面采集。另一种是墙面采集模式,通过“以面代点”方法采集房屋面上的任一点,从而自动拟合出房屋拐角。通过旋转三维模型避免房檐干扰,直接采集到房屋墙体上,节省了大量外业调绘时房檐改正工作量。
(2)道路采集:在实景三维模型上采集道路任意一条边线,通过支路边线作业模式由软件自动生产另一侧道路平行线。
(3)其他要素采集:绘制一个封闭区域作为边界后对植被构面,自动生成二三维植被符号,并与实景三维模型相吻合;采集斜坡边缘先后自动生成二三维斜坡符号,并与实景三维模型相吻合;利用加点功能逐个采集井盖、路灯等独立地物(图2)。

图2 EPS平台下裸眼三维测图
3 试验结果分析
(1)空三加密精度分析
空三加密精度受诸多因素影响,例如航摄重叠度、相机成像质量、镜头畸变率、航摄天气状况、像控点分布、像控测量和刺点精度等[18-19]。以40m航高作为研究对象,在试验区布设20个像控点,分别将像控点均匀删除留至10个、6个,其余作为检核点,精度对比如表2所示。
由表2可知,在小范围试验区的空三加密过程中,增加像控点可以明显减少加密残差,但对检核点的残差影响不大。为进一步验证空三加密成果的可靠性和精度,在试验区另外选取40个特征点的平面和高程坐标进行实测,对比实景三维模型精度,结果如表3所示。

表2 不同像控点密度下空三加密精度对比

表3 不同像控点密度下三维模型特征点精度
由表3可知,不同像控点密度下,三套数据中20个像控点的实景三维模型精度最高,但整体相差不大,6个像控点下的特征点有个别平面点和高程点精度超限,因此在大区域作业时像控点间距控制在200m以内为宜。
(2)测图精度分析
以40m航高下获取的倾斜影像制作完成的实景三维模型为基础,分别对房角采集模型下采集的房角点坐标、基于墙面采集模式下的房角点坐标与外业实测的对应房角点坐标进行对比分析[20],平面位置较差如图3所示。
经过统计,房角采集模式和墙面采集模式的精度与实测精度的差值中误差分别为±0.039m和±0.041m。相较而言,房角采集模式下的测图精度稍高,但两种采集模式的测图精度均能满足大比例尺地形图精度要求。
对图3中的点位平面精度分布区间(cm)进行细分,结果如表4所示。

图3 两种房屋采集模式与实测平面位置精度较差分布(蓝色为房角采集模式,橙色为墙面采集模式)
由表4可知,基于墙面采集模式采集精度位于(7,∞)区间的房角点明显多于房角采集模式,分析原因是由于实景三维模型在这些点位处存在一定的模型扭曲现象,从而造成误差增大。

表4 坐标精度较差区间分布情况
选取测图成果中的90个地物和地貌特征点作为高程精度检核点,与外业实测高程值进行对比分析。
经过计算与统计,最大误差为0.161m,最小误差为0.023m,中误差为±0.061m,高程精度能够满足大比例尺地形图精度要求。
4 结论
与传统航摄法大比例测图方法相比,利用消费级无人机搭载倾斜相机开展航空摄影,在此基础上基于高精度实景三维模型测图,是一种适合于在广大农村地区推广应用的地籍与房产一体化测量的创新性技术,具备倾斜影像获取便捷、专业素质要求低、外业工作量小等优势,并已探索建立起成熟的生产技术路线,其数据成果精度经验证能够满足大比例测图精度要求,测图的精度取决于航摄数据的获取精度,地形图成图精度经验值为影像分辨率的3~5倍。
(1)基于实景三维模型测图精度损失主要产生于两方面:一是实景三维模型造成的精度损失,利用消费级无人机开展倾斜摄影,由于航高一般都较低,容易出现地物阴影和地物遮挡等盲区,局部反演出的点云数据存在一定高程误差,造成模型局部扭曲,导致基于墙面采集的房屋点精度超限;二是采集模式造成的精度损失,采用房角测量模式的精度要优于基于墙面测量模式采集的房角点,分析原因主要是因为基于墙面进行房屋边线采集时,每个墙面上的特征点采集完成后软件自动完成房屋面拟合,没有考虑房屋在建成时形状差异性,因此造成一定拟合误差,但基于墙面采集速度明显优于房角测量模式,可作为主要采集模式。
(2)为充分发挥基于墙面采集模式的高效率,有效提高采集精度,需要选择合理间距布设像控点,提高像控点采集精度,提高空三加密整体位置精度。提高模型表面表达精细度,减少实景三维模型局部扭曲。选好摄影季节,减少植被和其他覆盖物对房屋等主要要素的遮挡,同时保证具有足够的光照度,避免产生过大的阴影。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
西部交通科技(2021年9期)2021-01-11
当代陕西(2020年17期)2020-10-28
山东交通科技(2020年3期)2020-08-05
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
学苑创造·A版(2017年5期)2017-05-09