
深坑主题乐园玻璃栈道TMD控制模拟分析
2021-08-14 13:03褚腾峰
智能城市 2021年14期
褚腾峰
(上海同纳建设工程质量检测有限公司,上海 200232)
1 TMD原理概述
钢结构天桥(栈桥)具有重量轻、施工周期短、跨越能力强、地基成本低、可再生利用、抗震性能好等优点,被广泛应用于城市建设中。由于车辆激励和人行激励、风荷载等因素的存在,振动问题不容忽视,振动超限将影响建筑舒适度,造成人员恐慌甚至威胁使用者安全。此外,钢结构天桥结构的1阶竖向自振频率与人正常行走的频率相近,行人通过时易产生共振。国内外已经发生过多例人行天桥因行人激励引起振动过大的事件,英国伦敦千禧桥于2000年首次对公众开放,当天约有10万人通过该桥,每平方米的行人数达到了1.3~1.5人,由于行人激励引起了过量的水平振动,侧向位移达到了70 mm[1]。为保证使用性和舒适性,《城市人行天桥与人行地道技术规范》(CJJ 69—95)限制天桥结构基本频率不小于3 Hz,保证舒适度[2],但一般的钢结构人行天桥设计难以满足。通常采用两种方法进行减振设计,通过增加人行桥的刚度提高结构自振频率,但增加刚度的同时也会引起结构质量的增加,结构频率的提高效果却并不明显;不改变人行桥结构的频率,通过提高人行桥的阻尼减少振动动力响应[3]。调谐质量阻尼器TMD减振具有构造简单、可靠性高、减振性能好、造价低廉等优点,被广泛应用于大跨度桥梁及高耸结构风致振动控制和大跨度及长悬挑结构、人行桥的人致振动控制方面[4]。目前TMD系统的结构实现形式主要有三种,即支承式、悬吊式和碰击式,其中支承式和悬吊式最为常见[5]。支承式一般设置上、下两个质量块和两个相互垂直的滑轨,实现TMD对结构两个方向的控制。此种方式需要TMD质量块克服滑动摩擦力进行运动,质量块的启动存在滞后效应,且滑动过程中存在摩擦。美国纽约的Citycorp Center大楼和芝加哥的John Hancock大楼均采用支承式。悬吊式一般将质量块用吊索或弹簧悬挂在结构顶部,通常悬吊式的TMD质量块可以在任意方向进行摆动,可以实现对结构任意方向的振动进行控制。应用悬吊式TMD的典型工程实例是台北101大楼,其结构顶部用8组高强度钢索悬吊一根直径约5.5 m、重660 t的钢球形成的TMD系统。
本例所采用的调谐质量阻尼器(TMD)是由质量元件、弹簧系统和阻尼系统构成的子结构系统,与被控结构联结,分别为TMD结构提供质量、刚度和阻尼,对主结构起到调谐作用,达到减振效果。TMD的频率主要通过TMD的弹簧刚度kd调整,使其频率接近主结构的自振频率:

式中:kd——TMD弹簧刚度;md——TMD质量。
主结构受到外部激励产生共振时,子结构产生与主结构振动方向相反的惯性力作用在主结构上,减小主结构的振动响应。调谐质量阻尼器原理、TMD布置如图1、图2所示。

图1 调谐质量阻尼器原理

图2 TMD布置
2 有限元建模
2.1 建模详情
根据目前研究成果,TMD对结构的控制主要通过控制结构振型实现,因此TMD装置的最优位置通常是控振型中结构位移最大的位置。由模拟结果可知,最大位移发生在平台最外侧,因此本模型中TMD分别布设在16节点、18节点、20节点、22节点、30节点位置。SAP2000建模过程中,通过“定义-截面属性-频率相关的连接属性”定义阻尼器DAMPER,需要设置的参数包括频率(Hz)、刚度(kN/m)和阻尼。设计阻尼器与主体结构质量比为1%;SAP2000中查看结构总质量为10.83 t,TMD子系统每个质量块的质量取21.7 kg,在SAP2000建模时采用定义节点质量的方式施加。
阻尼器最佳频率比fr和阻尼比ζ:

式中:μ——质量比,0.01。
本研究中,fr≈1、ζ≈0.06,为了使TMD的控制效果达到最佳,应将TMD子结构的振动频率调至主体结构振动频率附近,鉴于设计TMD仍基于SAP2000模拟,因此频率调至8.1 Hz,得TMD系统中单个阻尼器的刚度kd取56.2 kN/m,最佳阻尼系数cd=2ζdmdωd,代入数据得132.5 N/(m/s)。利用“绘制-两点连接单元”在指定位置绘制NONE单元,“指定-连接单元-频率相关的连接属性-DAMPER”即完成弹簧单元和阻尼单元的设计与布置,指定节点完成质量块定义。
2.2 模态分析
完成TMD布置后先进行模态分析,对比发现平台的最大竖向位移仍为19 cm,基本无变化,可进行后续数值模拟。
3 人行荷载下加速度控制模拟
3.1 步行工况加速度对比
布设TMD情况下,分析步行工况下加速度,分别比较四个加速度传感器所在位置的最大加速度,得到有无布设TMD的加速度对比情况,如表1所示。
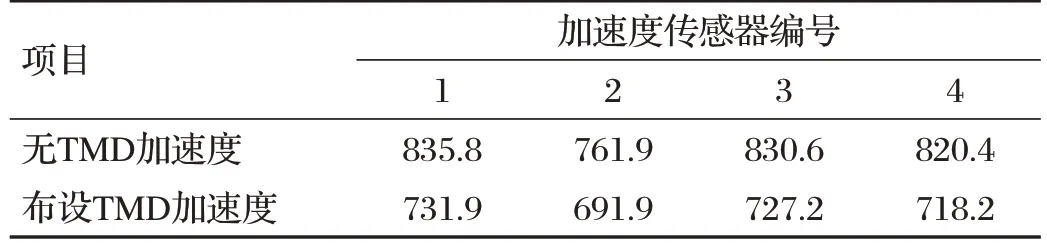
表1 步行工况最大加速度对比 单位:mm/s2
由现场舒适度检测可知,在15人步行情况下,有效加速度可以控制在0.15 m/s2以下。数值模拟下的有效加速度均超过舒适度范围,布设TMD有一定减振效果,约为12.4%。
3.2 跑步工况加速度对比
统计有无TMD布置时,4个加速度传感器得出的最大加速度,结果如表2所示。
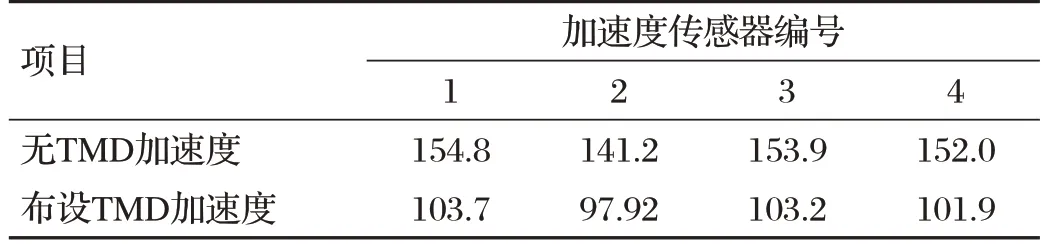
表2 跑步工况最大加速度比较 单位:mm/s2
跑步工况下未布设TMD时,最大加速度为0.15 m/s2,布设TMD后最大加速度为0.1 m/s2,减振效果良好,约为33%。
3.3 跳跃工况加速度对比
数值模拟结果显示无TMD时最大加速度超过舒适度限值不高,布设TMD后仍未减至舒适度范围内,减振程度约18%,如表3所示。

表3 跳跃工况最大加速度 单位:mm/s2
4 人行荷载下变形应力控制模拟
4.1 步行工况控制模拟
布设TMD情况下进行步行工况下变形应力控制模拟。分别比较布设TMD前后,静力水准仪和应变计所在位置的相应位移输出和应力输出。布设TMD有一定的减振效果,却并不显著,约为2%,如表4所示。

表4 步行工况变形应力对比
4.2 跑步工况控制模拟
统计跑步工况模拟结果,在跑动工况下布设TMD有一定的减振效果,但仍不显著,如表5所示。
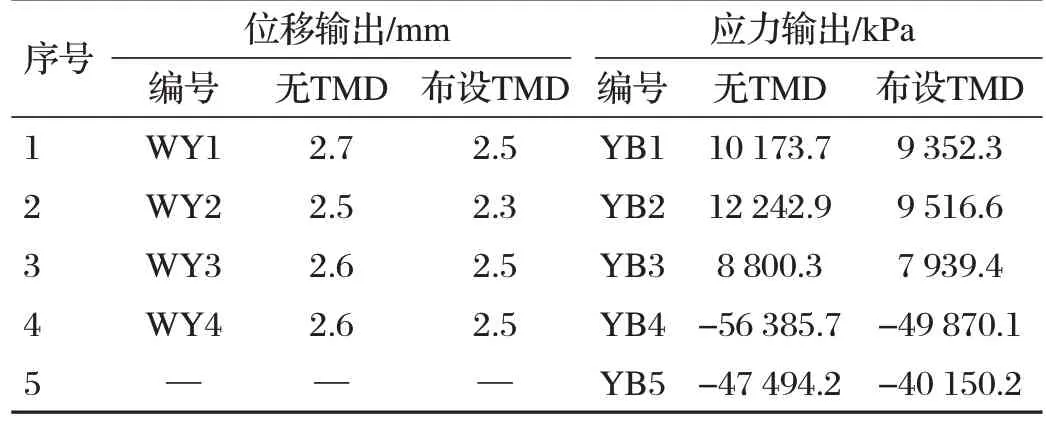
表5 跑步工况变形应力对比
4.3 跳跃工况控制模拟
有无布设TMD的位移和应力统计情况如表6所示。
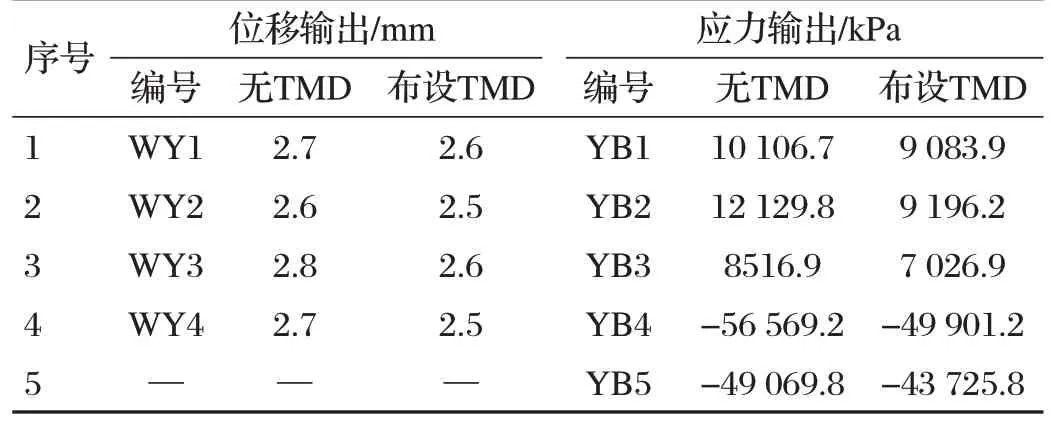
表6 跳跃工况变形应力对比
5 结语
综上所述,布设TMD对结构有益,特别是在改善振动舒适度方面,平均减振率约为21%,具有较好的减振效果,可考虑在玻璃栈道合适位置安装TMD,保证正常运营。
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
纺织科学研究(2021年9期)2021-10-14
工业安全与环保(2020年10期)2020-11-05
铁道通信信号(2020年1期)2020-09-21
四川建筑(2018年4期)2018-09-14
知识经济·中国直销(2018年4期)2018-04-18
浙江工业大学学报(2017年5期)2018-01-22
设备管理与维修(2016年6期)2016-03-16
工程建设与设计(2016年8期)2016-03-11
噪声与振动控制(2015年4期)2015-01-01
