
一种基于RSSI带路径损耗和噪声的室内定位算法*
2021-08-09 03:39陈世恩黄淋云
贵州大学学报(自然科学版) 2021年4期
陈世恩,黄淋云
(莆田学院 机电与信息工程学院,福建 莆田 351100)
物联网和机器人技术的一项关键技术是利用传感器或其他设备对人或机器人进行定位[1-2],这种技术被称为“定位”或“节点定位”。随着物联网技术的发展,关于节点定位的研究也越来越多。由于节点定位需要实时确认节点的位置,所以通常采用实时定位系统(real time location system,RTLS)来实时搜索节点位置。节点分为信标和接入点(access point,AP)两种,即未知节点(信标)和已知节点(AP)。目前有多种目标定位跟踪算法,其中常用的有:到达时间(time of arrival,TOA)[3]、接收信号强度指示(RSSI)[4]、加权质心定位算法[5]、到达时差(time difference of arrival,TDOA)[6]、到达角(angle of arrival,AOA)[7]和到达相位(phase of arrival,POA)[8]等等。不同的算法有着不同的优点和缺点,本文研究基于RSSI的定位方法,在原有基础上,为了克服信号传输过程中各种效应的影响,引入了路径损耗和噪声。
1 目标定位跟踪技术
目标节点定位需要多个AP节点,这些AP节点包含了已知位置信息,而目标节点的位置信息跟随节点移动而变化。因此,需要使用两个或两个以上包含已知位置信息的AP来确定目标节点的位置。
TOA方法通过测量传输时间来估算两节点之间的距离,从而确定节点的位置信息。TOA算法具有算法简单、易于实现、定位准确等优点,但也存在以下缺点:该算法需要保持发射和接收设备之间的时间同步,同时要求传感器节点要有较强的计算能力。采用TOA方法需要进行严格的时间同步匹配,但这种匹配现实很难实现。通常采用简单网络时间协议(simple network time protocol,SNTP)来实现时间同步。当该协议应用于TOA方法时,AP的时间同步可以匹配,但是不可能进行标记。由于AP的时间同步精度仅为1 s,所以该方法仅限于短距离定位的时间同步[9]。
加权质心定位算法是在质心坐标上反映参考节点决策的大小,并利用加权因子反映每个参考节点对质心位置的影响和它们之间的内在联系。该方法具有通信开销小、硬件要求低、适合传感器节点处理等优点,但同时也有一些缺点:对网络的连通性要求较高,对信标节点的密度要求很大[10]。
基于RSSI定位算法是通过测量接收器接收到的信号的强度来定位。与TOA、TDOA、AOA和POA等技术相比,RSSI定位算法的优点是器件结构简单,易于使用。同时,算法还具有硬件系统可扩充、有利于节点小型化、穿越障碍物等优点。但是,RSSI值的稳定性受环境影响较大,相比于其他定位算法,RSSI定位算法的精度和安全性较低[11]。
对上述3种定位方法的定位精度进行对比,发现TOA定位算法的误差率最小,精度最高。但是,TOA定位算法在实际应用中很难实现时间同步。尽管RSSI定位算法的误差率比TOA大,但在不增加硬件系统的情况下,在实际场景容易实现。因此,本文提出了一种基于RSSI的改进定位算法,可以应用于机器人、物联网的定位跟踪,特别是养老院的老年病人监护系统中。
2 RSSI测距法
RSSI测距是根据接收到的信号强弱来判断信号点与接收点之间的距离。发送端与接收端之间的功率关系遵循弗林斯传输方程[12]:
(1)
其中:PRX表示接收端接收到的功率,PTX表示发送端的发送功率,GTX和GRX表示发送和接收增益;λ表示波长,r表示发送端和接收端的直线距离。这里,假设在嵌入式设备中GTX和GRX均为1。
在实际应用场景中不能直接应用式(1),因为它没有考虑非视距环境。因此,为了能够在实际应用中使用式(1),引进了路径损耗。路径损耗公式如下[13]:
(2)
其中:PL表示路径损耗,r表示距离。
在从节点到AP的传输过程中,无线电信号会受到能量强度损失的影响。无线电信号强度随着传播距离的增加而降低,可以得出通信距离和无线电信号强度的关系表达式[14],如式(3)所示:
(3)
其中:d是目标节点与接收端之间的距离,d0是参考点与接收端之间的距离,PRSSI表示目标节点与参考节点的无线电信号强度差,P(d)和P(d0)分别是接收端的无线电信号强度和参考点的无线电信号强度,n为损耗参数。
以式(3)为基础,可以测量目标和参考节点之间的信号强度PRSSI,从而获得它们之间的通信距离。
为了模拟实际传播过程的一些影响,我们引入了噪声。
(4)
其中,Δ为随机噪声。
在仿真过程中,采用三边定位法加RSSI的方法进行模拟。三边定位法中可以通过已知的节点A、B、C,计算得到未知的节点D,节点D的坐标与节点A、B、C之间的关系[15]如式(5)所示:
(5)
其中:(xa,ya) 表示节点A的坐标,(xb,yb)表示节点B的坐标,(xc,yc)表示节点C的坐标,da表示节点A到未知节点D的距离,db表示节点B到未知节点D的距离,dc表示节点C到未知节点D的距离。
本文结合RSSI和三边定位技术,并考虑路径损耗和噪声的影响,具体的设置如图1所示。
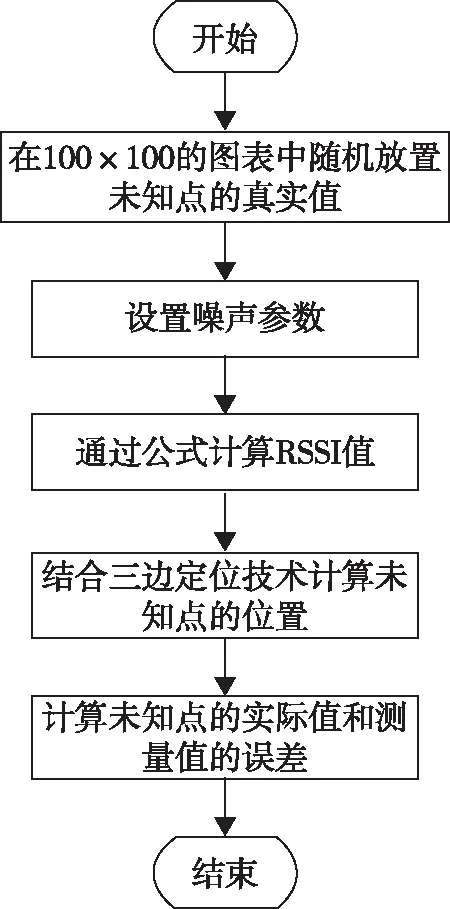
图1 设计流程图
3 实验结果与分析
仿真设置1个未知节点,移动未知点位置的时候,测量各参考节点的RSSI值,取离未知点附近的3个已知地址信息的节点,看成节点A,B,C,然后结合三边技术计算出未知点的位置信息。图2描绘了当3个节点的测量的RSSI值分别为-57.349 7、-61.3015和-64.025 4 dBm时的定位计算的结果。
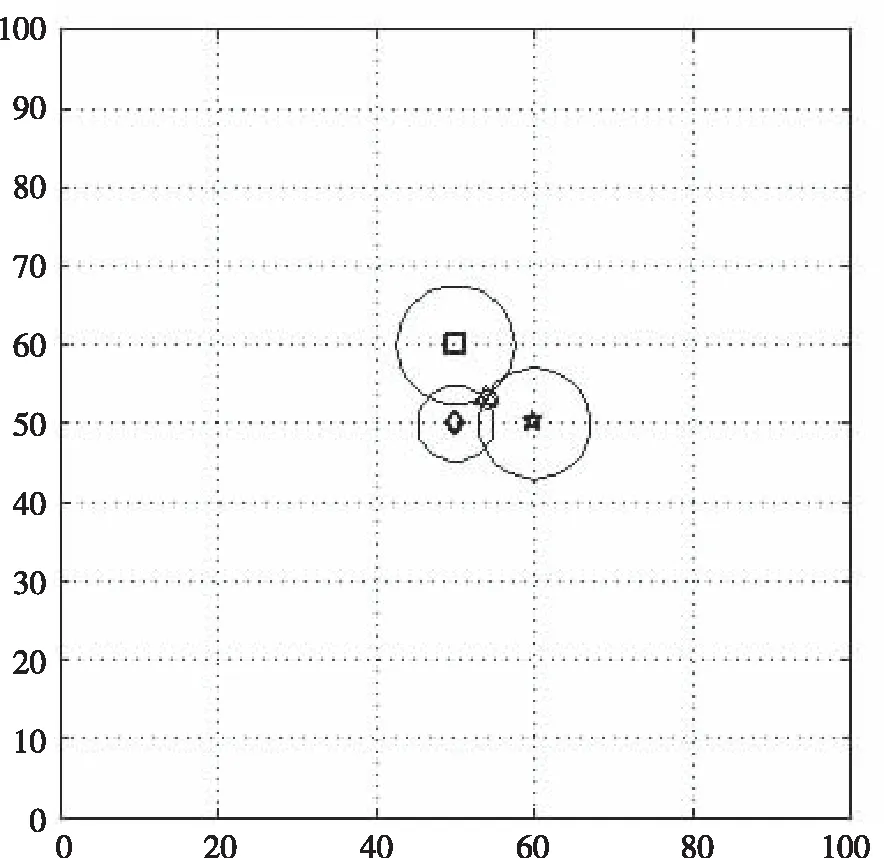
图2 实验结果图
其中:菱形代表节点A,五角星代表节点B,正方形代表节点C,小圆圈代表未知点位置的真实值,三角形代表未知点位置的测量值。
随机移动未知点,并在已设置的节点中选取未知点附近的3个参考节点的RSSI值进行计算,即可计算出未知点的位置。通过多次实验,获得的结果如图3、图4所示。
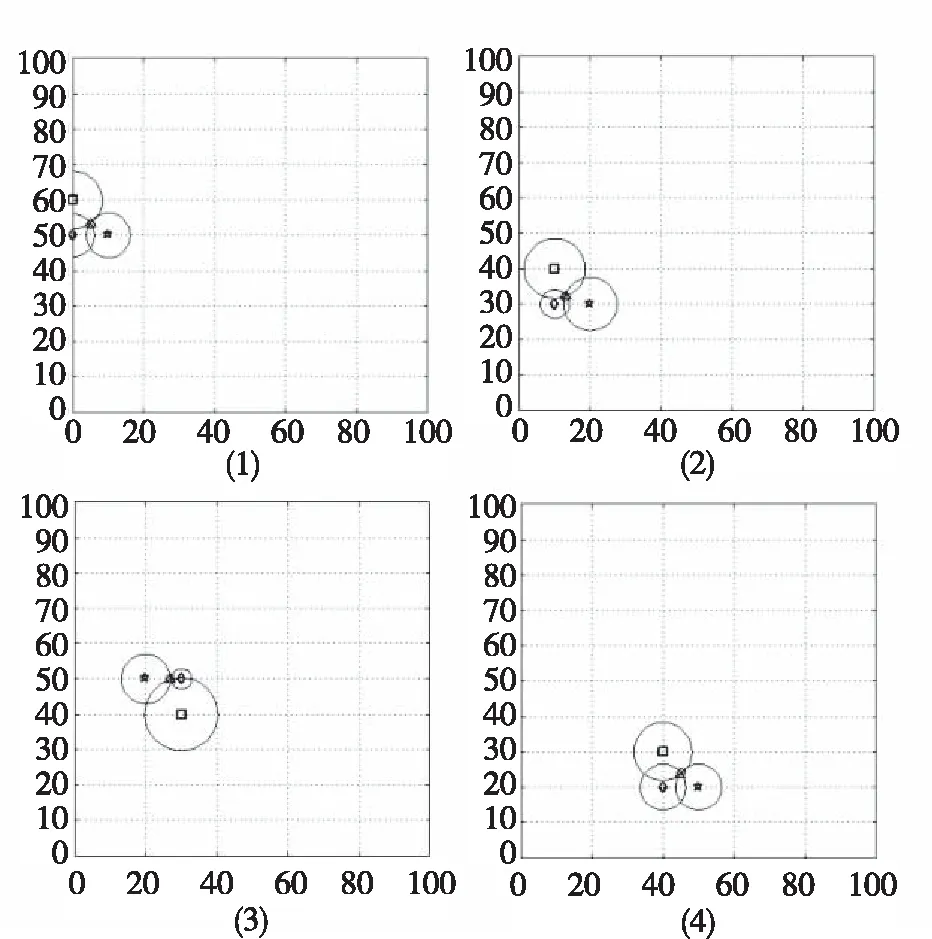
图3 实验结果图一
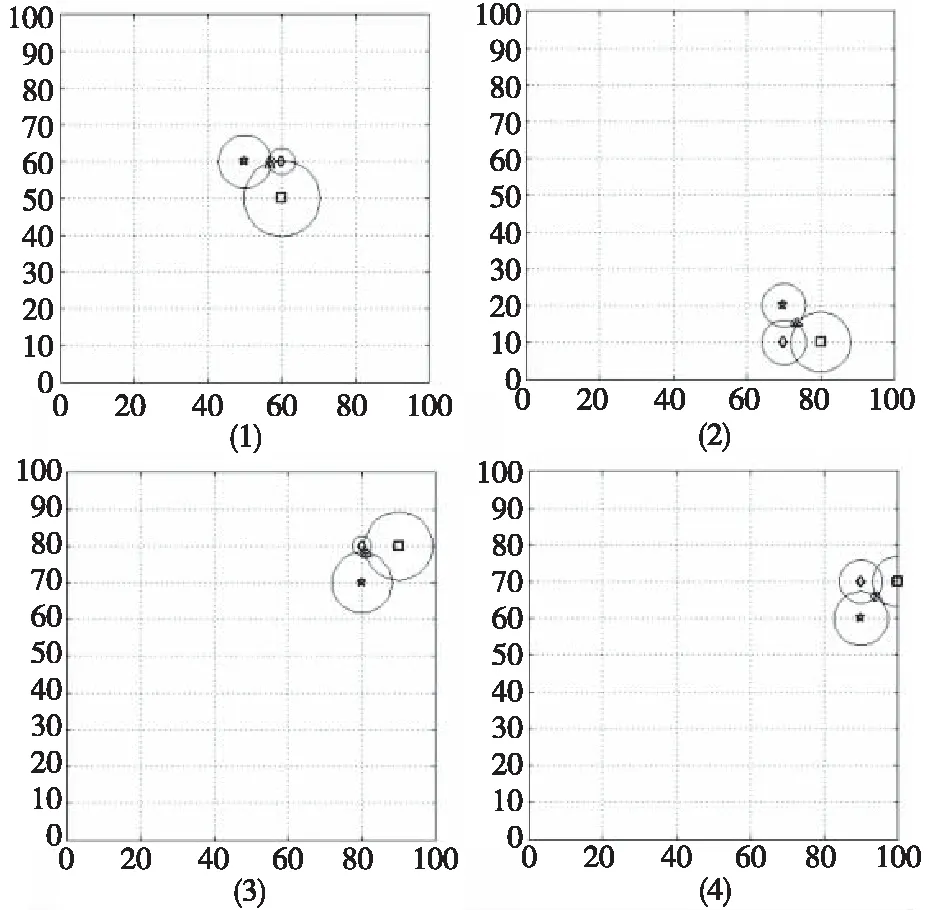
图4 实验结果图二
将图3、图4中未知点移动过程中选取的参考节点的RSSI值与误差值汇总, 误差值为未知点的真实位置与测量位置之间的直线距离。实验可以得到:误差值最大为0.540 7 m,最小为0.115 6 m,误差平均值约为0.373 2 m。结果如表1所示。
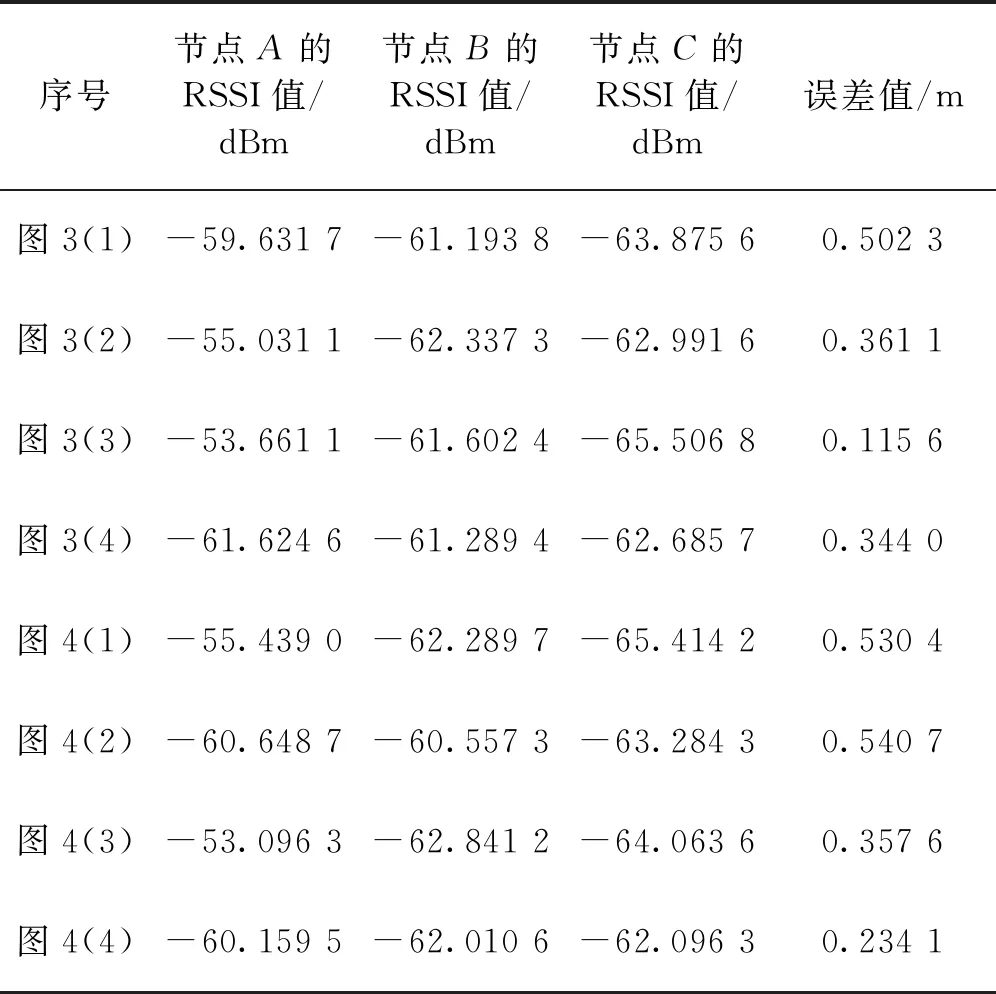
表1 实验结果数据
表1将图3、图4中未知点位置的真实值和仿真出来的测量值汇总,得出未知点移动轨迹如图5所示。
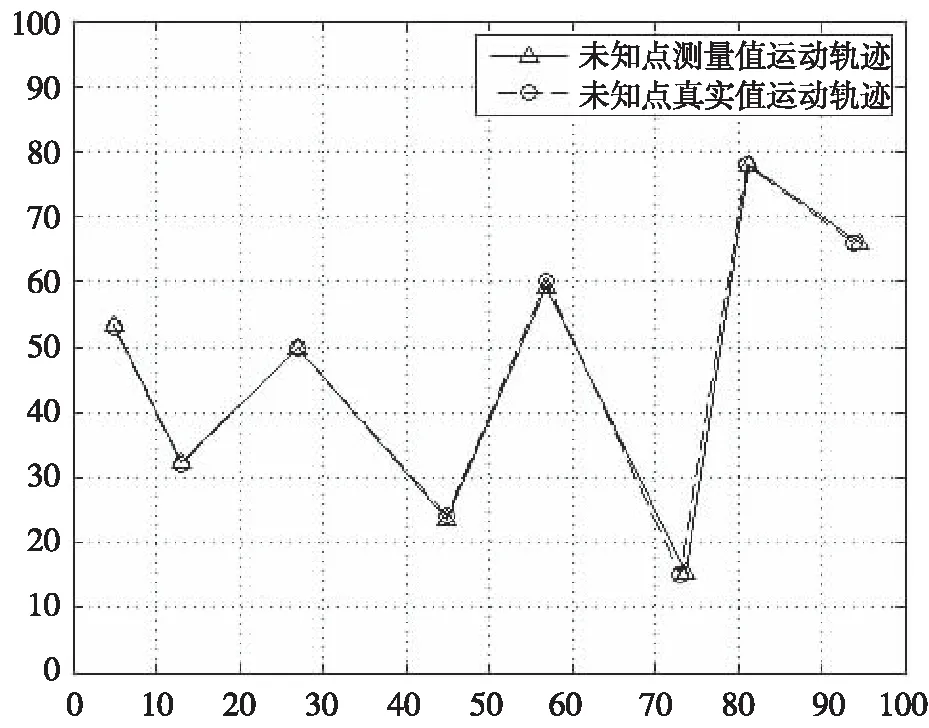
图5 未知点移动图
图5中,未知点的真实移动轨迹与仿真出来的测量值的移动轨迹基本重合,说明在实验误差范围内能够实现良好的定位跟踪。
4 结论
本文提出了一种改进型的基于RSSI室内定位算法,该算法可用于机器人、物联网等,特别是用于优化养老院的老年患者监控系统。通过模拟仿真,得到基于三边法和RSSI算法的测量结果,并给出理想点与测量点误差距离的计算结果。在实验过程中,为了更贴近实际,算法考虑了路径损耗和噪声的影响。通过计算,得出未知点的真实位置与算法测量出来的位置之间的误差平均值为0.373 2 m的定位精度。因此,当在机器人和物联网中应用此定位算法来估计定位时,可以大大减小测量的误差范围。
猜你喜欢
中华眼视光学与视觉科学杂志(2022年8期)2022-08-17
汽车实用技术(2022年5期)2022-04-02
核安全(2022年1期)2022-03-07
湖南饲料(2021年4期)2021-10-13
电子产品世界(2021年4期)2021-02-09
现代计算机(2019年26期)2019-10-31
科技与创新(2019年11期)2019-09-05
中国新通信(2019年24期)2019-03-30
科技视界(2016年16期)2016-06-29
电子产品世界(2016年2期)2016-03-29
