
改进的VR显示设备延迟性能测试方法及装置
2021-08-09 03:23韩世洋王潇潇杨叶花林洁芙
电子技术与软件工程 2021年11期
韩世洋 王潇潇 杨叶花 林洁芙
(广州计量检测技术研究院 广东省广州市 510000)
1 引言
虚拟现实技术(英文名称:Virtual Reality,缩写为VR),是20世纪发展起来的一项全新的实用技术。虚拟现实技术囊括计算机、电子信息、仿真技术于一体,其基本实现方式是计算机模拟虚拟环境从而给人以环境沉浸感。随着社会生产力和科学技术的不断发展,各行各业对VR 技术的需求日益旺盛。VR 技术也取得了巨大进步,并逐步成为一个新的科学技术领域。[1]头戴显示是虚拟现实系统中最重要的信息呈现方式,越来越广泛的被消费者接受和应用。目前,头戴显示技术正在向着穿戴无扰化、输出高清化、呈现舒适化的方向发展。
依据2020年7月1日发布实施的GB/T 38259-2019《信息技术 虚拟现实头戴式显示设备通用规范》,VR 头戴显示设备与移动相关的参数包括:移动延迟、移动灵敏度、移动跟踪误差等。移动延迟是指用户动作(头部、手、身体移动或转动等)到计算机系统根据用户新的视点生成相应的视景所需要的时间。研究表明,人能够感觉到30 ms 的延迟,若延迟超过300 ms,则虚拟现实系统的沉浸感开始遭到破坏并导致用户产生运动病。视觉延迟是由于虚拟现实系统硬件设备(包括头部、身体、手等用户位置跟踪系统的精度和反应时间,计算机的计算速度和容量等)的性能达不到预期的要求所致[2]。移动跟踪误差是指头戴式显示设备在发生位移时,跟踪系统所测得的位移与实际位移的平均偏差[3]。该项目主要由定位器的准确性和精度决定,在实际应用中,同样对沉浸度和舒适感有重要影响。因此,准确检测VR 头戴显示设备的延迟特性是判断设备的品质,解决设备开发中遇到的问题,以及评估设备舒适性过程中重要的环节。
2 延迟性能检测技术现状
目前,对于VR 头戴显示设备移动延迟测量装置的差异主要体现在外部移动信号的获取方式。北京理工大学的翁冬冬、荀航等人提出了分别以激光管、渐变编码、光栅尺等方式标定外部位置坐标(外部位置坐标是相对于VR 自身位置数据而言的)的方法[4~13],装置简图见图1。图中1 位置设有光敏传感器1,该传感器紧贴光编码器,用于VR 移动过程中外部位置数据的采集,2 位置设有光敏传感器2,该传感器用于采集VR 设备中的黑白画面显示规律。当对标外部位置编写的视频在VR 中显示时,运动的VR 使两个光敏传感器回传的信号产生不同步,该时间差即为延迟的测试结果。2019年12月发布的《GB/T 38259-2019 信息技术 虚拟现实头戴式显示设备通用规范》中对延迟项目的测试即采用了该方法[3]。旋转运动与移动运动的延迟测试原理类似,装置简图见图2。捷开通讯(深圳)有限公司的黄静宇、谢灼伦提出了以光源光强随距离变化而变化的特点,通过检测光强度获取外部位移特征的方式,进行VR 头显的延迟测试,装置简图见图3。[14]
3 改进的延迟性能检测装置及方法

图1:移动延迟设备的装置简图[4]
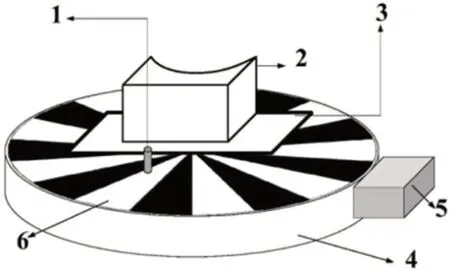
图2:转动延迟设备的装置简图[3]

图3:延迟测试的装置简图[14]
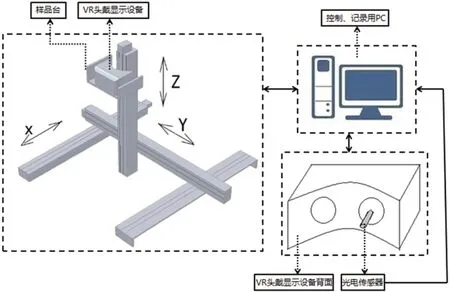
图4:装置结构示意图
目前,市场上的虚拟现实头戴现实设备主要包括3 自由度和6自由度两类。6 自由度的设备除了涉及旋转运动还包括三维的移动运动。在现有的移动特性检测装置中,一个实验周期只能进行一个项目(延迟或移动跟踪误差)的测试,进行另外项目的测试需要进入下一个试验周期,进行另外两个方向的位移特性测试还需要改变头戴设备工作姿态重新操作。现实中,虚拟头戴显示设备在正常工作姿态X、Y、Z 三个方向均有移动,多数情况下是三个方向运动的集合,这就要求测试在三个方向上分别进行或同时进行,以得到接近使用状态的测试结果。本论文设计了一套多项目多方向虚拟头戴设备移动特性综合检测装置,在执行国标的同时可进一步准确还原VR 的工作状态,并在该状态下进行多项目的同时测试,提高检测质量及效率。
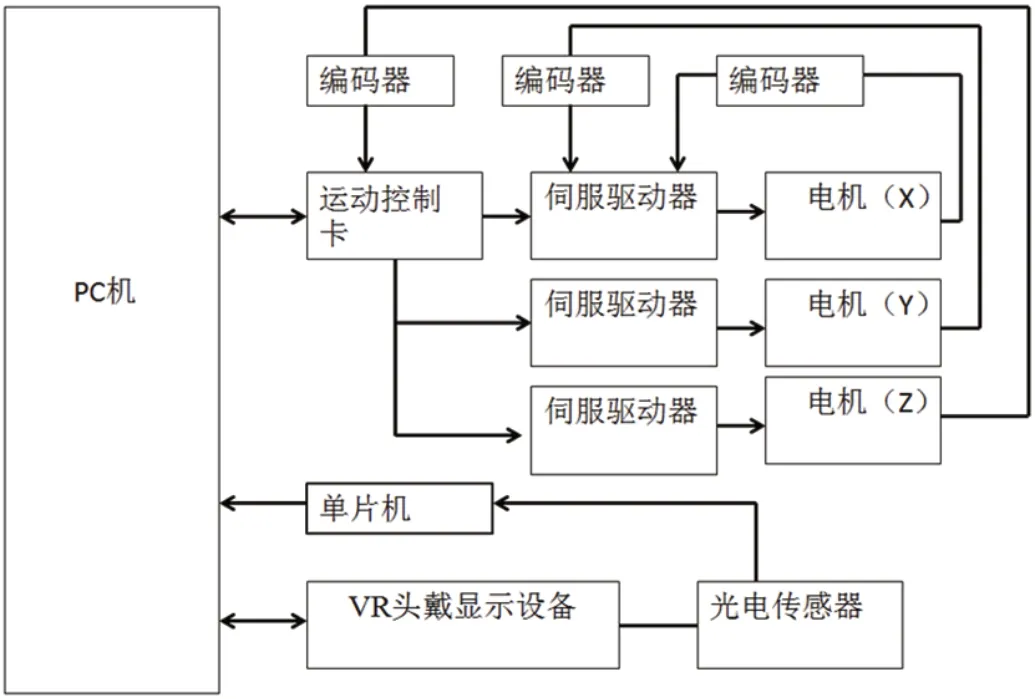
图5:系统数据传输流向图
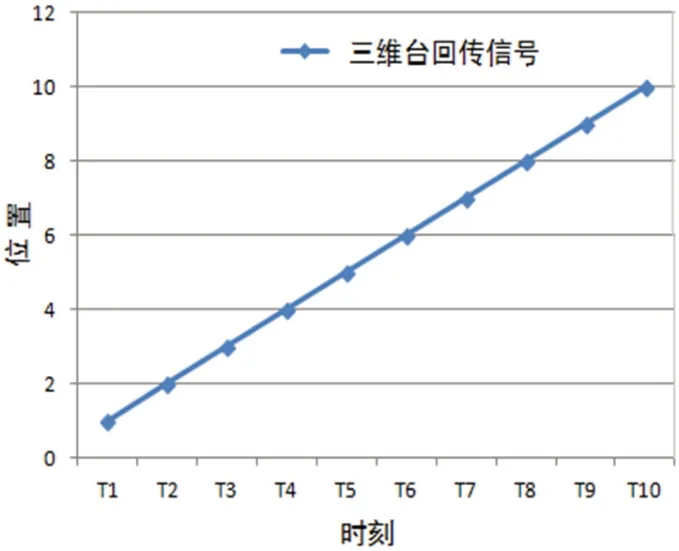
图6:三维台回传位置坐标与时刻的关系

图7:光电传感器回传信号与时刻的关系
3.1 装置结构及控制
设备机械结构包括可沿水平、垂直和前后方向移动的三条直线滑轨、位于垂直滑轨的样品台、用于采集VR 显示信号的光电传感器(采样率不低于1kHz)以及计算机。待测样品安装于样品台上,光电传感器置于VR 眼镜单眼的出瞳位置,由程序控制样品台移动,并获取相应的位置坐标。装置结构图见图4。采用PC 机作为上位机负责采集数据的分析与显示、运动控制卡、单片机的通信及待测样品的控制器,运动控制卡作为下位机直接与电机进行运动控制和位置监测,控制结构框架图见图5。

图8:采集数据处理走向图

图9:延时结果示意图
3.2 测试步骤
(1)初始化:对三维台移动路径进行预设,并以三维台位置坐标选取等间隔的10 点(移动路径可以是直线或折线)。令三维台以小于0.05m/s 的速度沿预设路径移动。同时记录到达三维台各预设位置时的VR 头戴显示设备计算出的位置坐标。
(2)生成测试显示信号:运行VR 头戴显示设备(以下简称VR)测试程序,使VR 在1 位置显示白画面,到达2 位置转为黑画面,再到3 位置转为白画面,依次类推直到10 位置。
(3)正式测试:再次按预置路径以0.5m/s 的速度匀速移动VR,采集三维台到达各个预置位的时刻及位置坐标(见图6),同时采集VR 到达各个预置位的位置坐标,同时记录光电传感器回传的信号与时刻的关系数据(见图7)。
3.3 数据处理
数据处理关系见图8。在一个试验周期,待测VR 从初始位置按预设路径移动到终点位置,期间以VR 回传的位置数据及三位台回传的位置数据可计算移动跟踪误差的测试结果,而以光电传感器回传数据和三维台回传位置数据与时间的关系,可求出移动延迟的测试结果。为确保移动跟踪误差的准确性,三维台的移动准确度需定时进行校准,周期通常为1年。
由三维台回传位置数据及光电传感器回传电平数据与时刻的关系,见图6、图7。提取图7 中1~10 位置对应时刻,与图6 进行对比,可得出1~10 各个位置对应的时间差t1~t10,见图9 延迟结果示意图,由公式(1)可得延迟结果。

式中:Ti —— 图像传感器出现第i 个电平变化拐点经历的时间;
Ti' —— 三维台到达第i 个预置位所经历的时间;
i —— 预置位编号;
t —— 移动延迟结果。
以VR 回传位置数据计算各个记录点与其相邻记录点之间的距离,按下式计算移动跟踪误差:

式中:TTE—— 移动跟踪误差
dstep—— 步长
di——各个记录点与其相邻记录点之间的距离
n——总步进次数
4 总结
随着虚拟现实头戴设备的消费市场日趋扩大,对于虚拟头戴显示设备的性能检测也成为众多业内人士关注的问题。影响虚拟现实产品使用舒适度的重要因素之一就是其移动特性的优劣,特别是延迟带来的眩晕成为产品舒适度的主要杀手。因此,对于延迟和移动跟踪误差的检测是评测虚拟头戴显示产品的主要指标。本论文中设计的虚拟现实头戴显示设备移动特性检测装置主要有以下特点:
(1)检测过程进一步贴近产品的使用状态;
(2)移动过程中同步采集延迟及移动跟踪误差的数据,在一个实验周期完成两个项目的检测。既增强了检测结果的可信度,又提高了检测过程的时效。
猜你喜欢
数字海洋与水下攻防(2020年5期)2021-01-04
电子测试(2018年22期)2018-12-19
汉语世界(2017年3期)2017-06-05
海外星云(2016年7期)2016-12-01
焊接(2016年8期)2016-02-27
中国光学(2015年1期)2015-06-06
小学生·多元智能大王(2015年4期)2015-05-18
郑州大学学报(医学版)(2015年2期)2015-02-27
中国科技术语(2012年3期)2012-03-20
