
基于无迹[H∞]滤波的锂电池SOC估计研究
2021-08-06 19:34苏成龙罗世昌
计算机时代 2021年7期
苏成龙 罗世昌

摘 要: 新能源汽车中锂电池的荷电状态(SOC)估计是电池管理系统的关键技术,对其准确估算有重要意义。所提的算法参考无迹卡尔曼滤波(UKF),将无迹变换(UT)融入到扩展[H∞]滤波中,用以估计锂电池系统状态均值和协方差,避免线性误差累积、增加算法的数值稳定性。在仿真实验中,在不同动态工况下分析了该算法的估计误差,证明算法在面对噪声干扰时具有较好的鲁棒性和准确性,是一种有效可行的算法。
关键词: 荷电状态(SOC); 锂电池; [H∞]滤波(HIF); DP模型
中图分类号:U469.72 文獻标识码:A 文章编号:1006-8228(2021)07-14-04
Research on unscented H-infinity filter based SOC estimation of lithium battery
Su Chenglong, Luo Shichang
(Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou, Zhejiang 310018, China)
Abstract: State of charge (SOC) estimation of lithium batteries in new energy vehicles is a key technology in battery management system, and it is of great significance to accurately estimate the SOC. The algorithm proposed in this paper refers to the Unscented Kalman Filter (UKF) and integrates the Unscented Transform (UT) into the extended [H∞] filter to estimate the mean value and covariance of the lithium battery system, which avoids the accumulation of linear errors and increases the numerical stability of the algorithm. In the simulation experiment, the estimation error of the proposed algorithm is analyzed under different dynamic conditions. It is proved that the algorithm has good robustness and accuracy in the presence of noise interference, and it is an effective and feasible algorithm.
Key words: state of charge; lithium battery; H-infinity filter; DP model
1 研究背景
随着社会经济的不断发展,由此带来的能源紧张和环境污染问题将更加突出。在国家科技重大项目和节能与新能源汽车示范推广等扶持政策的支持和推动下,我国新能源汽车关键零部件及相关技术取得重大进步,动力电池发展环境持续优化。动力电池作为电动汽车的核心部件之一,对其关键状态的准确估算和管理是电动汽车发展的核心问题。荷电状态(SOC)是关键状态之一,对于电动汽车的能源优化管理和生命健康管理具有重要意义。SOC的准确估算可以最大程度地提高动力电池的利用率,延长电池寿命,并最终降低动力电池的成本。
目前常见的SOC估计方法有开路电压法、安时积分法以及基于模型的方法。开路电压法需要长时间的静置,使得电池达到稳定状态,这显然不适合实时动态的估计荷电状态。安时积分法应用最为广泛,但也存在明显的缺陷,如其对于初始值准确性高,对于电流传感器的精度要求也很高,容易产生累计误差[1]。基于模型估计的方法是目前主流的估计方法,基于模型的估计方法中主要采用扩展卡尔曼滤波算法及其一些衍生算法,例如无迹卡尔曼滤波、容积卡尔曼滤波等[2]。针对锂电池此类的非线性系统,在线性化过程中不可避免的带来较大的估计误差。此外,对于状态估计中,估计算法也应满足一定的抗干扰性能。
针对锂电池状态估计中存在的不足,本文提出参考无迹变换的方法采用Sigma点传播的方法进行预测并将其融入[H∞]滤波算法中作状态估算,将提出的无迹[H∞]滤波简称为UHF。
2 锂电池建模及参数辨识
2.1 锂电池建模
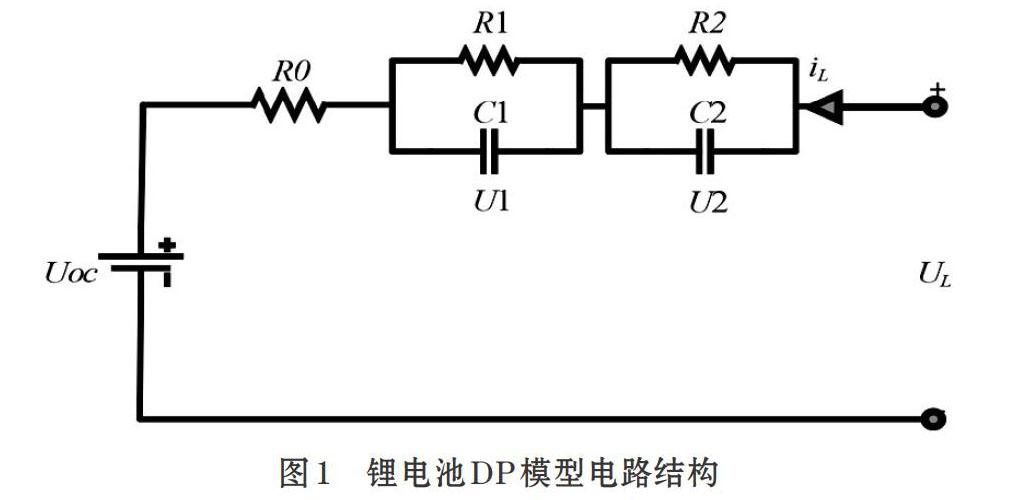
电池管理系统需对储能系统中锂电池的多种状态做出估计和预测,如荷电状态、健康状态、内阻等,而实现这些功能的前提是建立精确、可靠的锂电池模型。常见的电池模型有电化学模型、等效电路模型与分数阶模型。为减少多参数带来的繁重计算,本文采用常见的二阶等效电路模型,也称为双极化(DP)模型,模型结构如图1所示。该模型使用电压源表示锂电池的平衡电势,RC网络描述电池的动力学特性。对动力锂电池的各种工作状态有较好的适用性,而且可以推导出模型的状态方程,便于分析与应用。
根据电路理论,图1所示的二阶RC电池等效电路模型的电学行为可推导为:
[U1.=-1R1C1U1+1C1IbU2.=-1R2C2U2+1C2IbUp=UOCSOC+R0Ib+U1+U2] ⑴
常见的SOC的定义如下:
[SOCt=SOCt0+t0tηItdtCn] ⑵
2.2 电池模型参数辨识
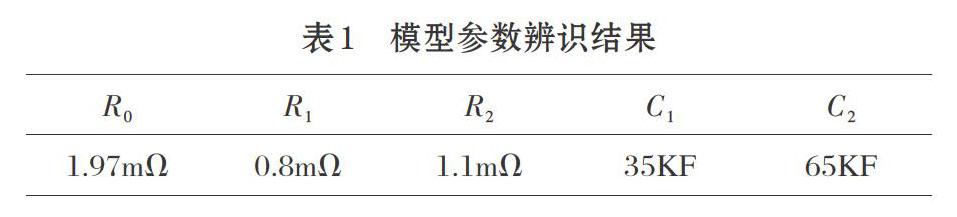
通过测得的数据得到电压和电流随时间变化的曲线,根据电压电流曲线进行参数辨识,得到电池的阻容参数。本文采用HPPC脉冲充放电测试,进行参数辨识。该过程包括多个混合脉冲,以10%SOC间隔放电至放电截止。在每个混合脉冲过程中基于最小二乘原理使用指数拟合法获得待辨识模型的参数[3-5]。全局优化后的模型参数辨识详细参数如表1所示。
开路电压(OCV)与SOC之间的映射关系也是电池的电特性中重要内容。开路电压参数通过对电池以1C放电10%SOC静置1h,随后测量电池开路电压。重复该放电过程直至电池截止电压,建立开路电压OCV与SOC之间的映射关系。本文采用六阶多项式拟合实验值获取,拟合效果如图2所示,对应的拟合后的多项式见公式⑶。
[Uoc=11.08×SOC6-25.58×SOC5+17.54×SOC4-1.59×SOC3-2.386×SOC2+1.263×SOC+3.422] ⑶
3 基于UHF的锂电池SOC估计算法
3.1 系统状态方程建立
二阶RC电池模型的线性状态方程可表示为:
[xk=Ak-1xk-1+Bk-1uk-1+ωk-1yk=Ckxk+Dkuk+υk]
此处状态量[xk=U1U2 SOCT];系统矩阵[Ak=1-TsR1C10001-TsR2C20001];输入矩阵[Bk=TsC1TsC2ηTs3600Cn];
[xk]和[xk-1]分别表示时间步k和k-1的状态变量,[uk]表示时间步k时刻的输入电流。[Ts]表示系统的时间步,为简化计算[Ts]的时间步长设为1s,[Cn]代表电池的额定容量,[η]代表动力电池的库仑效率。量测方程中
[UL=UOCSOC+U1+U2+R0Ib],可以推导出[Ck=11?UOCSOC?SOC],[Dk=R0]。[ωk]、[υk]分别为过程噪声和量测噪声,相应的协方差值分别设置为Q和R。
3.2 标准UKF算法
UKF作为经典的滤波算法其也已经被许多研究者应用在锂电池系统中状态的估计[6-7],下面对其计算流程做简要介绍。
初始化阶段对于初值的设置,设置初始状态量[x0],相应的均值为[x0]初始协方差为[P0];确定2n+1个Sigma点集对应权重。
⑴ 时间更新
预测Sigma点的状态:
[x[s]kk-1=fx[s]k-1,uk] ⑷
通过变换后的Sigma点样本的线性加权回归近似计算预测粒子的状态均值及协方差:
[xkk-1=s=02nωsmxskk-1] ⑸
[Pkk-1=s=02mωscxskk-1-xkk-1xskk-1-xkk-1T+Q] ⑹
⑵ 量测更新
将Sigma点带入非线性观测方程:
[zkk-1=hxskk-1,uk] ⑺
[zkk-1=s=02nω[s]mzkk-1] ⑻
预测新息协方差及互协方差:
[Pzzkk-1=s=02nω[s]czkk-1-zkk-1zkk-1-zkk-1T] ⑼
[Pxzkk-1=s=02nω[s]cxa[s]kk-1-xkk-1zkk-1-zkk-1T] ⑽
计算增益:
[ Kk=Pxzkk-1Pzzkk-1-1] ⑾
计算状态量及其协方差在k时刻的更新:
[xk=xkk-1+ Kkzk-zkk-1] ⑿
[Pk=Pkk-1-KkPzzkk-1K-1k] ⒀
3.3 UHF滤波算法
UHF算法对EHF的计算流程做部分更改,下面先对EHF算法原理做简要说明[8]。EHF详细推导过程本文不再赘述。
建立如下离散线性系统:
[xk=Akxk-1+Bk-1uk-1+ωk-1yk=Ckxk+Dkuk+υkzk=Lkxk]
上式中:狀态方程与观测方程不变,增加了估计目标[zk],[zk]是估计状态的线性组合;[Lk]为自定义矩阵,依据状态量中各分量的重要程度进行设计。定义如下代价函数:
[J=k=0N-1zk-zk22x0-x02P-10+k=0N-1(ωk2Q-1k+νk2R-1k)<γ2]
EHF旨在经归一化输入噪声能量和初始误差能量后尽可能最小化估计误差能量,即估计目的是最小化[J]的最大值,定义为[minzkmaxωk,νk,x0J<γ2]。由[P-1k=P-1kk-1+HTkR-1Hk-γ-2kI>0],得[γ2k>maxeigP-1kk-1+HTkR-1Hk-1],其中[Hk]表示量测模型的雅克比矩阵,max[eigA]表示矩阵A的最大特征值,可得:[γ2k=α maxeigP-1kk-1+HTkR-1Hk-1],其中,[α]为大于1的尺度参数。
对标准UKF算法流程做部分改动,相应的无迹[H∞]滤波算法如下:
[xk=xkk-1+Pxzkk-1R+Pzzkk-1-1zk-zkk-1]
[Pk=Pkk-1-Pxzkk-1Pkk-1R-1e,kPxzkk-1P[m]kk-1T]
其中:[Re,k=R+Pzzkk-1Pxzkk-1TPzzkk-1-γ2I+Pkk-1]
4 实验验证分析
为验证算法的有效性,测试对象选取主流的三元锂电池。本次实验中电芯额定容量为32Ah,标称电压为3.7V。本次验证采用UDDS与DST两种典型的动态工况验证SOC估算算法。
两种典型动态工况下对应的SOC估计结果及误差如图3和图4所示。从图中可以看出本文所提估算算法误差整体保持在1.5%左右;即使存在短时间内电流大小甚至方向突变的情况,此时SOC估计误差也能控制在2%以内。当初值存在10%较大的初值误差时,算法能在较短的时间内通过迭代收敛到参考值附近并很快稳定到可控的误差范围内。由此可见,本文的无迹[H∞]滤波算法有可靠的数值稳定性;在面对较大初值误差噪声干扰时具有较好的鲁棒性和准确性。
5 结束语
为了改进线性化过程高阶项丢失带来的误差,本文参考UKF中无迹变换,用无迹变换来处理均值和协方差的非线性传递问题。建立了二阶等效电路模型,基于最小二乘原理进行参数辨识并进行全局优化,最后在典型动态工况下进行验证分析。结果表明本文提出的基于UHF估计SOC滤波算法具有2%以内的较小估计误差且对初值误差不敏感,是一种有效可行的算法。工程应用中可将算法移植到嵌入式设备中,具有一定的实用价值。后续工作中,将温度、老化等影响因素加入到算法中,实现对SOC更准确的估计。
参考文献(References):
[1] 范兴明,曾求勇,张鑫.基于改进安时积分法的电动汽车电池SOC估计与仿真研究[J].电气应用,2015.34(8):111-115
[2] 田茂飞,安治国,陈星等.基于在线参数辨识和AEKF的锂电池SOC估计[J].储能科学与技术,2019.8(4):745-750
[3] 罗勇,赵小帅,祁朋伟等.车用动力电池二阶RC建模及参数辨识[J].储能科学与技术,2019.42(4):125-131
[4] 王伯瑞,郑培.锂离子电池SOC估算研究[J].电源技术,2020.44(10):1506-1509,1517
[5] 陈息坤,孙冬.锂离子电池建模及其参数辨识方法研究[J].中国电机工程学报,2016.36(22):6254-6261
[6] 刘润琴,曾富豪,黄登高.基于RLS和UKF算法的锂电池SOC估算研究[J].汽车实用技术,2019.12:12-14
[7] 程泽,杨磊,孙幸勉.基于自适应平方根无迹卡尔曼滤波算法的锂离子电池SOC和SOH估计[J].中国电机工程学报,2018.38(8):2384-2393
[8] 康國华,刘建业,刘瑞华等.自适应闭环[H∞]滤波在组合导航系统中的实现研究[J].控制理论与应用,2008.3:547-550
猜你喜欢
测绘科学与工程(2017年5期)2017-05-07
电源技术(2016年2期)2016-02-27
百科探秘·航空航天(2015年3期)2015-12-01
海军航空大学学报(2015年1期)2015-11-11
电源技术(2015年7期)2015-08-22
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
电子设计工程(2014年20期)2014-02-27
电子设计工程(2014年18期)2014-02-27
储能科学与技术(2014年5期)2014-02-27
