
乘波体飞行器低复杂度预设性能反演控制方法
2021-08-05 02:29姜宝续卜祥伟齐强
航空兵器 2021年2期
姜宝续 卜祥伟 齐强

摘 要: 针对传统神经网络预设性能控制方法结构复杂、控制实时性不高等问题,为乘波体飞行器(Waverider Vehicle,WV)提出了一种低复杂度的预设性能反演控制方法。首先,设计了一种形式简单、不依赖初始误差的新型性能函数,对跟踪误差进行包络约束。其次,采用转换误差策略,通过引入一种转换误差,将对跟踪误差的不等式约束等价转换为等式约束。然后,基于转换误差,为WV设计了一种无需任何学习参数的新型反演控制器,并避免了传统反演控制的“微分项膨胀”问题。最后,仿真结果表明,所提方法可以保证跟踪误差良好的动态性能与稳态精度。
关键词: 乘波体飞行器;预设性能;新型性能函数;新型反演控制器;转换误差
中图分类号: TJ765;V448 文献标识码: A 文章编号: 1673-5048(2021)02-0011-10
0 引 言
乘波体飞行器(Waverider Vehicle,WV)具有响应快速、机动性高、航程远、突防能力强、探测与拦截难度大、杀伤力大等突出特点,且具备传统航天飞行器所不具有的战略、战术与效费比等方面的突出优势,已经成为世界各航空航天大国为争夺空天权而争先发展的方向[1-4]。
作为WV能够安全、高效地执行和完成飞行任务的核心,控制系统设计目前属于国际前沿热点,国内外均有众多学者和科研机构开展这方面的研究。WV构型特殊复杂,飞行环境未知因素多,导致为其建立的运动模型存在很大的非线性和不确定性。同时,WV的超机动飞行对其控制系统的动态性能也提出了极高的要求。因此,控制系统的鲁棒性与动态性能也成为了关注热点。文献[5]基于反演控制设计结构,引入径向基函数神经网络对模型未知函数和不确定项进行逼近,实现了参数不确定情形下对WV参考指令的鲁棒跟踪,但没有考虑神经网络逼近误差的影响。进一步,文献[6]利用全局调节动态神经网络进行在线逼近WV的未知模态,并引入鲁棒项处理神经网络估计误差带来的影响。文献[5-6]虽能实现对WV参考指令的鲁棒跟踪控制,但是对控制系统的动态性能的约束效果不是很理想。为此,文献[7]基于预设性能控制(Prescribed Performance Control,PPC)方法,通过设计性能函数对跟踪误差进行包络约束,可以定量调节跟踪误差的收敛速度、超调量等动态性能指标,从而实现控制系统满意的动态性能指标。文献[8]提出一种新型鲁棒预设性能控制器设计方法,能同时满足高超声速飞行器瞬态响应和稳态性能,通过设计一种新型时变对数型障碍Lyapunov函数,结合动态面法,保证了WV高度和速度子系统稳态跟踪误差精度和动态性能。
以上方法虽能较好地保证控制系统的鲁棒性与动态性能指标,但是采用神经网络逼近需要对其权值矩阵的元素进行在线学习,在线学习量大,控制实时性不高。现有的PPC性能函数形式过于复杂,设计参数较多,工程实用性不高。基于此,本文为WV设计了一种低复杂度预设性能反演控制方法。设计一种构型简单的新型性能函数对跟踪误差进行约束,基于反演设计框架,采用转换误差设计控制器,避免了对虚拟控制律的求导计算。与传统神经网络控制方法相比,所提方法不需要任何在线学习参数,可以满足控制算法良好的实时性。最后,通过仿真实验验证了控制策略的有效性和优越性。
1 问题描述
1.1 WV纵向运动模型
以NASA研制的X-43验证机为对象,建立WV纵向运动的二维模型[9],如图1所示。
建模采用二维激波-膨胀波理论计算定常气动力与力矩并忽略了粘性影响;在充分考虑刚体运动与弹性振动的影响后采用一阶活塞理论近似计算非定常气动力;采用准一维定常流动假设建立发动机模型;采用拉格朗日方程建立了WV的弹性动力学方程;忽略模型中弱耦合与慢动态因素,建立一个面向控制器的WV纵向运动参数拟合模型如下:
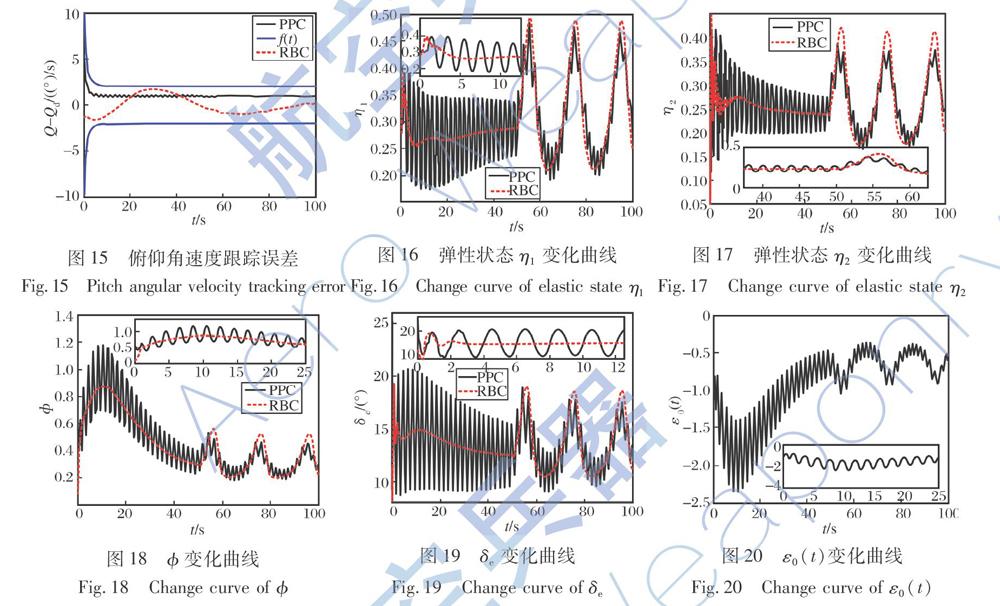
仿真结果如图6~24所示,与文献[17]的鲁棒反演控制(Robust Back-Stepping Control,RBC)结果进行对比。
由图6~9可见,采用PPC时的速度跟踪误差与高度跟踪误差均被限定在预设区域内;与RBC相比,PPC能使速度跟踪误差与高度跟踪误差具有更好的动态性能;当参数存在摄动时,PPC的控制精度也更高,表现出更强的鲁棒性。 图10~11表明,两种控制方法的航迹角控制效果相当,但PPC的航迹角响应更平滑。图12~15表明,虽然RBC的俯仰角与俯仰角速度响应更平滑,但采用PPC时,这两个角度响应没有高频抖振现象,并且PPC能够保证俯仰角跟踪误差与俯仰角速度跟踪误差具有更好的动态性能与稳态精度。由图16~19可见,两种控制
方法的弹性状态与控制输入均没有高频抖振现象。图20~24表明,ε0(t),ε1(t),ε2(t),ε3(t),ε4(t)均有界。由图7,9,11,13,15可见,所有跟踪误差均被限定在預设包络内,使得跟踪误差不仅动态性能较好,稳态精度同样较高,同时控制鲁棒性也满足要求。
4 结 论
通过设计一种新型性能函数,使控制律摆脱了对跟踪误差精确初值的依赖,且能使所有跟踪误差具有良好的动态性能与稳态精度。所设计的控制律不含有任何自适应参数或学习参数,具有良好的实时性。同时性能函数构型简单,无需对虚拟控制律求导,避免了微分项膨胀。仿真结果表明,所提方法能够将跟踪误差约束在预设的包络内,以便于保证跟踪误差满意的动态性能与稳态性能。
参考文献:
[1] 梁晓庚,田宏亮. 临近空间高超声速飞行器发展现状及其防御问题分析[J]. 航空兵器,2016(4): 3-10.
Liang Xiaogeng,Tian Hongliang. Analysis of the Development Status and the Defense Problem of Near Space Hypersonic Vehicle[J]. Aero Weaponry,2016(4): 3-10.(in Chinese)
[2] 卜祥偉. 高超声速飞行器控制研究进展[J]. 航空兵器,2018(1): 47-61.
Bu Xiangwei. Progress on Flight Control of Hypersonic Flight Vehicles[J]. Aero Weaponry,2018(1): 47-61.(in Chinese)
[3] 王鹏飞,王洁,时建明,等. 吸气式高超声速飞行器控制研究综述[J]. 航空兵器,2015(3): 3-7.
Wang Pengfei,Wang Jie,Shi Jianming,et al. Research Progress on Control System of Air-Breathing Hypersonic Flight Vehicles[J]. Aero Weaponry,2015(3): 3-7.(in Chinese)
[4] 贾二勇,袁涛,王鹏飞,等. 吸气式高超声速飞行器反演自适应控制[J]. 航空兵器,2017(4): 14-20.
Jia Eryong,Yuan Tao,Wang Pengfei,et al. Adaptive Back-Stepping Controller Design for Air-Breathing Hypersonic Vehicle[J]. Aero Weaponry,2017(4): 14-20.(in Chinese)
[5] 李小兵,赵思源,卜祥伟,等. 高超声速飞行器预设性能反演控制方法设计[J]. 北京航空航天大学学报,2019,45(4): 650-661.
Li Xiaobing,Zhao Siyuan,Bu Xiangwei,et al. Design of Prescribed Performance Backstepping Control Method for Hypersonic Flight Vehicles[J]. Journal of Beijing University of Aeronautics and Astronautics,2019,45(4): 650-661.(in Chinese)
[6] 赵贺伟,胡云安,杨秀霞,等. 考虑弹性振动的高超声速飞行器预设性能控制[J]. 振动与冲击,2017,36(7): 241-247.
Zhao Hewei,Hu Yunan,Yang Xiuxia,et al. Prescribed Performance Control for a Hypersonic Vehicle Considering Elastic Vibration[J]. Journal of Vibration and Shock,2017,36(7): 241-247.(in Chinese)
[7] 王鹏飞,罗畅,刘承君,等.吸气式高超声速飞行器预设反演鲁棒控制[J].弹箭与制导学报,2021(1): 124-129.
Wang Pengfei,Luo Chang,Liu Chengjun,et al. Back-Stepping Robust Control for Air-Breathing Hypersonic Vehicle with Prescribed Performance[J]. Journal of Projectiles,Rockets,Missiles,and Guidance,2021(1): 124-129. (in Chinese)
[8] 冯振欣,郭建国,周军. 高超声速飞行器新型预设性能控制器设计[J]. 宇航学报,2018,39(6): 656-663.
Feng Zhenxin,Guo Jianguo,Zhou Jun. Novel Prescribed Performance Controller Design for a Hypersonic Vehicle[J]. Journal of Astronautics,2018,39(6): 656-663.(in Chinese)
[9] Bolender M A,Doman D B. Nonlinear Longitudinal Dynamical Model of an Air-Breathing Hypersonic Vehicle[J]. Journal of Spacecraft and Rockets,2007,44(2): 374-387.
[10] Parker J T,Serrani A,Yurkovich S,et al. Control-Oriented Modeling of an Air-Breathing Hypersonic Vehicle[J]. Journal of Guidance,Control,and Dynamics,2007,30(3): 856-869.
[11] Fiorentini L. Nolinear Adaptive Controller Design for Air-Breathing Hypersonic Vechicles[D]. Columbus: The Ohio State University,2010.
[12] Bolender M A,Doman D B. Nonlinear Longitudinal Dynamical Model of an Air-Breathing Hypersonic Vehicle[J]. Journal of Spacecraft and Rockets,2007,44(2): 374-387.
[13] Parker J T,Serrani A,Yurkovich S,et al. Control-Oriented Modeling of an Air-Breathing Hypersonic Vehicle[J]. Journal of Guidance,Control,and Dynamics,2007,30(3): 856-869.
[14] 胡云安,耿宝亮,盖俊峰. 初始误差未知的不确定系统预设性能反演控制[J]. 华中科技大学学报: 自然科学版,2014,42(8): 43-47.
Hu Yunan,Geng Baoliang,Gai Junfeng. Prescribed Performance Backstepping Control for Uncertain Systems with Unknown Initial Errors[J]. Journal of Huazhong University of Science and Technology: Natural Science Edition,2014,42(8): 43-47.(in Chinese)
[15] 卜祥伟,吴晓燕,白瑞阳,等. 基于滑模微分器的吸气式高超声速飞行器鲁棒反演控制[J]. 固体火箭技术,2015,38(1): 12-17.
Bu Xiangwei,Wu Xiaoyan,Bai Ruiyang,et al. Sliding-Mode-Differentiator-Based Robust Backstepping Control of Air-Breathing Hypersonic Vehicles[J]. Journal of Solid Rocket Technology,2015,38(1): 12-17.(in Chinese)
[16] 李小兵,赵思源,卜祥伟,等. 高超声速飞行器非仿射模型的预设性能反演控制[J]. 控制理论与应用,2019,36(10): 1672-1681.
Li Xiaobing,Zhao Siyuan,Bu Xiangwei,et al. Prescribed Performance Control Method for Non-Affine Model of Hypersonic Vehicles[J]. Control Theory & Applications,2019,36(10): 1672-1681.(in Chinese)
[17] Bu X W,Wu X Y,Zhang R,et al. Tracking Differentiator Design for the Robust Backstepping Control of a Flexible Air-Breathing Hypersonic Vehicle[J]. Journal of the Franklin Institute,2015,352(4): 1739-1765.
Low Complexity Prescribed Performance Back-Stepping
Control of Waverider Vehicle
Jiang Baoxu1,Bu Xiangwei2*,Qi Qiang1
(1. College of Graduate,Air Force Engineering University,Xian 710051,China;
2. Air and Missile Defense College,Air Force Engineering University,Xian 710051,China)
Abstract: In view of the complex structure of neural network prescribed performance control method and low control real-time performance,a low-complexity prescribed performance inversion control method is proposed for waverider vehicle(WV). Firstly,a new type of performance function with simple form and independent of initial error is designed to envelop the tracking error. Secondly,using a conversion strategy,the inequality constraint on the tracking error is equivalently converted into an equality constraint by introducing a conversion error. Then,based on the conversion error,a new type of inversion controller without any learning parameters is designed for WV,and it avoids the “differential term expansion” problem of traditional back-stepping control. Finally,the simulation results show that the proposed method is expected to guarantee good dynamic performance and steady-state accuracy of tracking error.
Key words: waverider vehicle;prescribed performance;new performance function;new back-stepping controller;conversion error
收稿日期:2021-04-23
基金項目:中国科协青年人才托举工程项目(18-JCJQ-QT-007)
作者简介:姜宝续(1998-),男,辽宁大连人,硕士,研究方向为飞行器控制技术。
通讯作者:卜祥伟(1987-),男,河南夏邑人,副教授,博士,研究方向为飞行器先进控制技术。
