
无人机自主电力巡线关键技术研究
2021-07-30 02:38曾忱,郭勇,段炼
通信电源技术 2021年7期
曾 忱,郭 勇,段 炼
(国网湖北送变电工程有限公司,湖北 武汉 430063)
0 引 言
输电线路通常位于交通不便、渺无人烟的山区,随着电网的建设,输电线路杆塔增多,人员不足等问题明显。依靠人工进行巡视查找线路缺陷的方法已经不现实,巡视质量较低。遇到特殊天气,如雷雨暴风等情况时,巡线存在巨大的安全风险,输电线路直升机巡视无法开展,容易产生各种安全问题,出现缺陷时也无法顺利发现[1-3]。
本文主要研究高精度三维激光点云数据的关键技术,依靠这项技术实现无人机航线自主规划和自主作业,从人工操作型变成自动型,提高巡线的可靠性,实现高质量输电线路自主巡检模式。
1 基于激光点云的三维航线规划平台研发
1.1 激光雷达原理
激光雷达系统通过激光测距手段可以测量目标的位置、形状及状态,从而达到探测、识别以及跟踪目标的目的[4,5]。激光雷达可以形成点云形式数据,生成三维坐标。它作为一个传感器,工作光谱段处在红外线到紫外线之间,组成原件主要有接收机、测量控制系统、电源以及发射机。
无人机上的激光雷达取得电力走廊的激光数据,包括影像数据、摄像数据、红外紫外数据以及环境变量参数等。通过计算激光雷达获得的数据可以得到线路刨面图、截面图、弧垂长度以及铁塔高度等资料,形成点云激光三维模型[6]。
1.2 基础点云数据管理
利用采集来的激光点云数据可以处理形成输电线路的三维数字模型,将线路下方的导线、地线、树、铁塔、山川、电力线沿线地形以及河流等构建成模型。
1.3 重构电力线的方法
无人机激光雷达受到现场环境和地形地貌等因素的影响,取得的输电导线点云数据密集程度不够,最终造成点云空间分布间距过大和导线断裂等,因此需要恢复导线,实现其原有空间布局。本文采用逐步降维的方法,形成三维空间曲线重塑。
首先过滤重复数据,删除数据重复点;其次依照导线在水平面分布呈直线的特点拟合二维平面直线,进行一次降维;再次依照导线在垂直水平面上呈抛物线特点分布实现二次降维和二维曲线拟合;最后完成整个三维空间的拟合,获得导线三维整体空间的分布。
一次降维实现X-Y平面的直线拟合,二次降维实现X-Z平平面的直线拟合,最终拟合整个三维空间。图1为导线重构的示意图。

图1 导线重构的示意图
1.3.1 导线数据剔除重复点
因为激光雷达重复接收数据,会得到点云数据重复点过多,并且同一个空间位置有几个以上的相同数据会影响计算速度,因此需要进行预处理。将导线数据存储进set容器中,然后对重复点进行过滤剔除。
1.3.2 生成相对坐标
激光雷达采集数据较多,需要进行重新定位,选择适合的坐标原点。设置处理的导线点云数据为对象,分别选取X、Y、Z方向最小值,形成一个空间点(Xmin,Ymin,Zmin),将它当做新的坐标原点,处理所有的导线数据,生成相对坐标。选择Xmin和相对应的Y值为y_xmin,形成一个点(xmin,y(xmin)),把点作为中心点在X-Y平面上旋转变换,获得跟与X轴平行的数据。

1.3.3X-Y平面直线拟合
采用处理过后的导线激光点云数据,实行平面最小二乘法直线拟合。计算公式为:
1.3.4 空间导线恢复
先在x方向设置一个步长,获得对应的然拟合直线上的y值,将y坐标值旋转变换,获得平行于x轴的新坐标,并将其输入方程获得z坐标,最后将各项坐标值相加,求得对应原点值,也就是拟合的空间导线所有坐标值。
2 输电线路巡检航线自动规划
通过激光雷达点云数据获得的线路巡检数据,在输电导线之间实施自动测量,产生三维数据库,生成安全距离检测数据报告,包括工况安全距离检测报告、危险点检测报告、各种输电线路的交叉信息表、线路最大安全距离检测报告以及隐患点分析统计表等。检测内容包括输电线路系统参数、输电线路无人机扫描获得作业气象的条件、输电线路的设备参数以及输电线路的巡检总体4项。获得参数后不仅要记录线路名称、运行的塔号、报告的产生时间、工作时的负荷以及最大负荷,还要记录当时的气象条件、线路名称、塔号、里程、扫描温度、扫描湿度、扫描风向以及扫描风力。
自动巡线需满足3点要求,一是巡检过程不能重复巡检同一杆塔,二是总时间需最短,三是风险高的杆塔优先通过。
自动巡线杆塔时间与杆塔的关系可以表示为:

式中,i、j分别表示塔的代号,Tij代表巡检雷达到达i塔和j塔之间距离耗费的时间。在现场环境下,Tij受到多种条件的干扰。
巡线过程主要包括以下3步。首先,初始化。循环次数和自适应循环次数设为0,最大循环次数用Nmax表示,计算得出塔杆的距离Dij后开始航线规划。其次,迭代计算公式。使用迭代计算对杆塔的信息素浓度进行调整。最后,选择全局最优路线。所有道路搜索完成后,计算每一次的代价和,代价之和最小的路线则为最优路线。
3 无人机自主避障功能
3.1 无人机局部自主避障方案
无人机避障功能的实施要提前获得无人机和输电线周围障碍物间的位置关系,在飞行的同时需要传感器获得环境的位置信息,根据信息处理保持适合的飞行速度和飞行角度来躲避障碍。目前有以下两种方法可以取得位置信息。一是通过现场环境的二维地图,在巡线范围标记所有障碍物的地点,使得无人机在特定的高度按照路径进行规划,躲避障碍。此方法要求地图的精准度较高。二是采用位置传感器探索输电线路四周障碍,根据处理器中的避障决策来进行躲避[7]。
目前,无人机的发展中通常研究针对未知障碍物的自主避障技术。无人机利用视觉传感器、超声波传感器、激光雷达传感器以及GPS等获得空间信息,其中视觉传感器的作用是取得无人机和输电线的距离,超声波传感器和激光雷达传感器的作用是获得相对位置信息,而GPS可以得到经纬度数据。通过整合这些数据,从而获得最优方案。
各类型传感器的分布如图2所示,其中1、2、3、4是超声波传感器,位于无人机的左前、右前、左后以及右后,5、6、7、8是激光雷达测距传感器,位于无人机的前、后、左以及右。
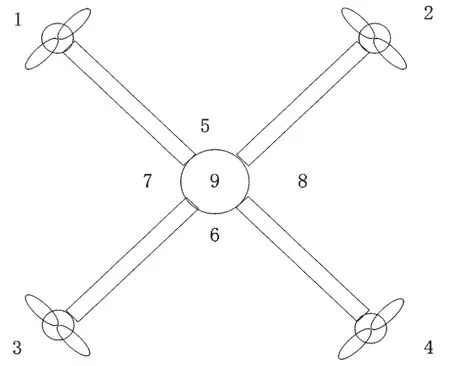
图2 无人机传感器分布图
3.2 避障导航传感器选择
无人机传感器由于其自身测量特性和环境因素的影响以及环境的不确定性等,因此飞行过程存在不安全因素。每一种传感器能够提供避障的信息,但是存在一定的环境干扰使其无法精准得到目标物体的准确状态。因此需要使用多种传感器,检测融合各种信息,从而有效获得真实的障碍物信息。本文选用可以采集输电导线周围场强信号的工频电场、检测无人机飞行速度的加速度计、检测无人机飞行姿态的陀螺仪传感器以及可以对输电导线及周围环境进行实时测距的超声波传感器[8]。
3.3 神经网络多传感器数据融合的方法
神经网络能够映射任意函数关系,适合加入模糊理论系统配合使用,用来表示模糊化处理、模糊化推理以及精确化计算等。模糊神经网络的输入输出节点对应系统的输入输出信号,神经网络的隐含节点代表隶属函数和模糊规则[9]。采用神经网络的并行处理能力提高模糊系统的推理,与以概率理论为基础的融合方法对比,不但可以提高普通人工神经网络信息处理的能力,而且还能处理不确定的信息。无需其他先验信息,就可以融合多传感器信息,大大提高了融合系统的融合能力和准确度。
Kohonen网络的原理是网络输入数据时,竞争层上计算输入样本与竞争层神经元权值之间距离最小的神经元就是获胜的神经元。通过调整获胜神经元和相邻神经元权值,让获胜神经元及周边的权值无限接近输入数据,同类神经元获得近似的权系数,而不同类的权系数明显不同[10]。
4 结 论
为了发挥自主巡检的优势,需进一步解决人工巡检的弊端和风险。本文分析研究了激光点云和避障系统,配合人工智能识别技术,实现故障的识别、诊断以及分析。采用传感器、激光雷达、GPS系统等获得线路状态数据,通过神经网络进行融合,实现实时监测与感知。当出现异常数据时,可以与历史监测数据进行对比分析,得出线路故障诊断报告。未来将进一步加强对三维建模、实时信息回传以及自主降落技术的研究,完善无人机调度管理平台系统,进一步实现无人机输电线路状态监测,保证无人机飞行的安全性,提升巡检的智能化。
猜你喜欢
卫星应用(2022年1期)2022-03-09
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
电子制作(2019年11期)2019-07-04
源流(2018年6期)2018-12-03
电子制作(2018年16期)2018-09-26
无人机(2018年1期)2018-07-05
汽车电器(2017年1期)2017-12-06
