
室内装修墙漆自动滚刷装置
2021-07-26 03:11:56李海平毕天滋罗昭宇
机械设计与制造 2021年7期
李海平,江 山,毕天滋,罗昭宇
(广西大学机械工程学院,广西 南宁 530004)
1 引言
根据中国国家统计局2018年1~9月份全国房地产开发和销售情况显示,房屋施工面积767218万平方米,同比增长3.9%[1]。随着住房面积的增加以及人民生活水平的提高,对室内装修需求日益增大,而在目前的装修市场中,仍采用人工粉刷墙壁,虽然装修工人中不乏技能娴熟之人,但大多数工人技术一般,行业素质缺失,不能令人满意,且在装修过程中,对于墙壁上部,则是采用搭建手脚架进行粉刷,这不仅是一个复杂的工作而且增加工人的工作风险,装修所带来的效果也往往不能令人满意[2]。针对这一现象,特设计了一款可以自动进行刷漆的装置,该装置主要由粉刷机构和升降机构来实现对墙壁的粉刷,利用供给机构来解决油漆的自动化供给问题,对我国住房室内墙壁具有很好的适配性[3]。
2 室内粉刷任务分析
人工粉刷墙壁,如图1 所示。为市面上最常见的室内粉刷,工人站在人工搭建的手脚架上,手持粉刷用具对墙壁进行人工粉刷,这不仅要求力度的均匀也要求粉刷速度的均匀,对大部分的粉刷工人来说是一个不小的挑战。为使机器粉刷达到人工粉刷的效果,则机构设计需要符合以下几点要求:

图1 人工粉刷墙壁Fig.1 Hand Painted Wall
(1)粉刷力度均匀,速度均匀。
(2)粉刷速度适中,不会造成墙漆的飞溅。
(3)粉刷机构的简单易操作。
(4)粉刷头浸染墙漆均匀。
3 机构设计与分析
3.1 整体设计
装置简图,如图2所示。室内装修墙漆自动滚刷装置是一种集行走机构、墙漆供给机构、粉刷机构和升降机构于一体的自动化装置。总体设计从连杆机构和仿生学的角度出发,利用机械连杆与电动机的多样化结合,模拟人工刷墙时的规范动作,达到对墙面的粉刷的目的。利用挤压装置,将油漆源源不断的供给到粉刷头,从而实现室内粉刷墙壁一体化的目的,即提高了效率又解放了劳动力。
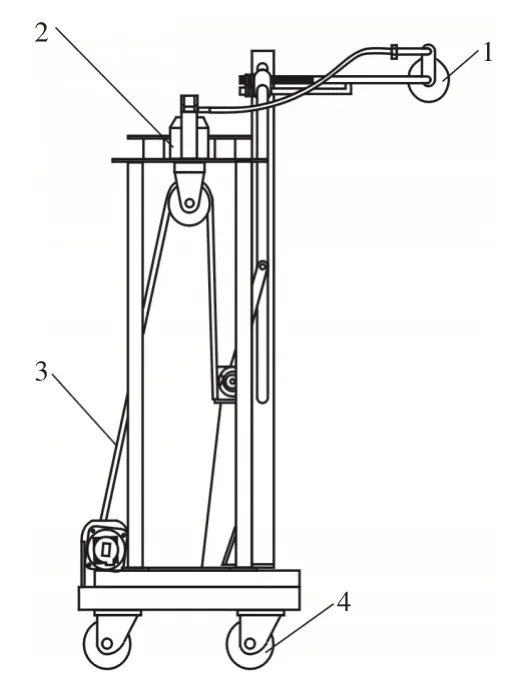
图2 装置简图Fig.2 Schematic Diagram of the Device
3.2 粉刷机构设计与分析
3.2.1 粉刷机构的设计
粉刷机构的设计,如图3所示。设相对坐标系Axy,A点为坐标原点,即电机所在位置,x轴为水平方向,y轴为垂直方向。在电机所在处安装杆件AB,使其固定在电机的旋转轴上,杆件BC与杆件AB在B点以铰链衔接。将粉刷头与BC杆件铰接后,外套在支撑杆上,并且约束粉刷头的运动方向为垂直方向。在电机启动时,顺时针旋转,从而带动杆件AB、杆件BC的运动,使得粉刷头垂直运动,从而完成粉刷动作。

图3 粉刷机构简图Fig.3 Schematic Diagram of Painting Mechanism
为设定杆件BC与参考系x轴垂直时为静态位置,则可得墙刷的运动轨迹理论公式:

联立式(1)~式(2)得出粉刷头在垂直方向的位移。

对式(3)左右两边同时进行求导,可得粉刷头在垂直方向的速度公式。

式中:H—粉刷头垂直位移轨迹;
V—粉刷头速度;
l1—杆件AB长度;
l2—杆件BC长度;
ɑ—电机与支撑杆件在水平方向上的距离
可见,粉刷装置的粉刷范围H和速度V控制受到机构杆件长度以及旋转角度的影响,为接下来的仿真研究提供了理论依据。
粉刷机构受力分析,如图4 所示。对粉刷机构进行受力分析,并计算出矢量关系式,并且由矢量关系式,推算出粉刷头的受力及其影响因素。

图4 粉刷机构受力分析Fig.4 Stress Analysis of the Painted Mechanism

得出粉刷头在X轴方向的力受杆件l1、杆件l2和角度θ4的影响,为接下来的仿真研究提供了理论依据。
3.3 升降机构分析
3.3.1 升降机构的设计
升降机构简图,如图5所示。该机构原理为升降电动机通过钢线与粉刷机构相连接,为保证粉刷机构的垂直升降,特设计定滑轮机构,保证升降的垂直及平稳性。运行升降电动机,带动钢线收缩,从而使得粉刷机构垂直移动,实现该机构对室内房屋墙壁上部的粉刷,扩大机构的粉刷范围,解决室内装修上部搭建手脚架所带来的不便及安全隐患。

图5 升降机构简图Fig.5 Brief Diagram of Lifting Mechanism
3.4 供给机构分析
供给机构简图,如图6所示。该机构通过曲柄滑块带动连杆摆动,从而使得挤压装置运行,油漆从供给口流出后送至粉刷头,对粉刷头进行浸润,完成供给操作。

图6 供给机构简图Fig.6 Supply Organization Chart
为保证粉刷头能够得到足够的油漆浸润,从而保证粉刷浓度的均匀化,特对供给装置内的油漆流速进行研究[4]。

式中:hl—沿程损失;λ—沿程损失系数;d—管道内径;l—管道长度;g—地球引力;P1—供给口处压力;P2—粉刷头处压力;γ—伯努利系数;hξ—管流局部损失;Re—雷诺数;ρ—油漆密度;ν—油漆运动粘度。
测量供给管口和粉刷头的油漆流速分别为VK,并将VK带入式(13),即可得出油漆在运输过程中的沿程能量损失hl。后将能量损失hl带入式(14),得出在粉刷头处油漆的速度VK1,将其带入式(15),求出该速度条件下的雷诺数Re,当Re≫2320时,可认为油漆处于紊流状态,即油漆充满管道,可使油漆均匀的喷向粉刷头,从而达到均匀粉刷的要求。可见,在油漆运输过程中,损失的能量为hl,与管道内径和管道长度有关,通过控制着两项因素,可以控制能量损失,从而控制油漆的运动状态,满足墙壁粉刷的高质量要求。
4 仿真分析
供给机构简图,如图7所示。为更好的展示机构的优越性,利用UG建立静态物理模型,并将模型导入ADAMS中,对结构的性能和合理性进行分析和改进[5]。
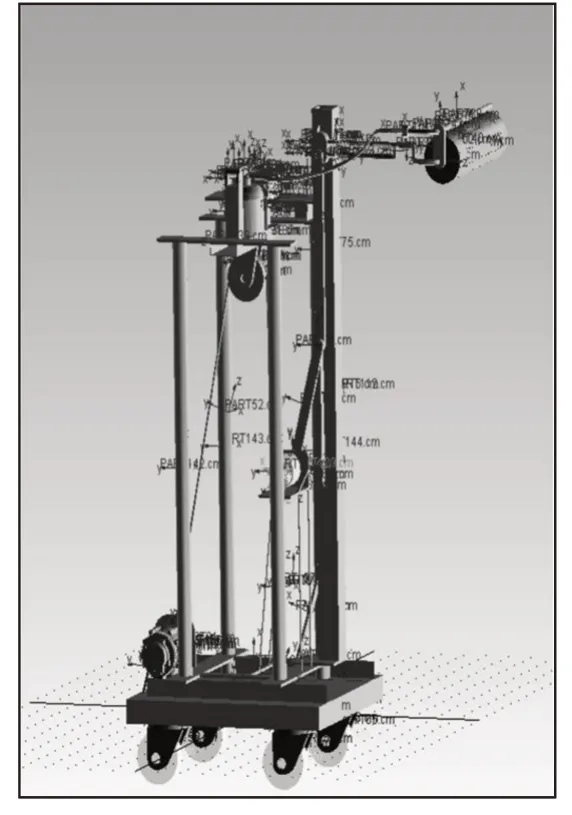
图7 装置仿真模型Fig.7 Device Simulation Model
本设计方案中,为更好的探讨机械连杆的长度对粉刷头受力的影响,特取l1=300mm,分别取l2=400mm、450mm 和500mm,ɑ=80mm,电机转速V=24°·s-1,将数值l1、l2带入式(12)中,利用分析软件对受力进行分析,杆件受力分析,如图8所示。分析可得当两杆件尺寸相近时,杆件l2的受力较为均匀,减轻了杆件因为变应力而造成的疲劳损伤,延长了装置的寿命和增强装置的合理性。

图8 杆件受力分析Fig.8 Force Analysis of Members
选取l2=400mm,并对粉刷头的相关运动状态进行分析。通过对机构的位移分析,粉刷头位移分析,如图9所示。可以看出粉刷头在设定的条件下,周期为15s,位移为650mm,运行稳定,没有出现位移的突变,减轻了杆件的冲击性受力。粉刷头速度分析,如图10 所示。粉刷头的速度在200mm·s-1到-150mm·s-1之间。速度较低,可以使粉刷头与墙壁有足够的时间结合,提高粉刷质量,且速度较低,可以更好的对粉刷次数进行控制,减小机器因不均匀受力产生的震动[6]。

图9 粉刷头位移分析Fig.9 Displacement Analysis of Painted Head

图10 粉刷头速度分析Fig.10 Velocity Analysis of Painted Head
5 控制系统设计
控制系统,如图11 所示。主要由位置传感器、粉刷控制系统、供给控制系统和升降控制系统等组成。装置的粉刷电机、升降电机和供给电机均为伺服电机,通过驱动器对电机的运行状况进行控制并反馈到操作页面,操作人员可以通过显示屏查看装置的运行状况,并且可以根据施工条件的不同来调节电机运动的功率,从而控制粉刷墙面的质量和效率。

图11 控制系统Fig.11 Control System
6 实验
为了了解装置在室内运行的真实情况,制造出实物样机,如图12所示。并且邀请三位技能熟练的工人(从事室内装修工作十年以上)进行对比实验,实验数据,如表1所示(工人实验结果取平均值)。

表1 实验数据Tab.1 Experimental Data

图12 实物样机Fig.12 Physical Prototype
经实验结果可知,机器粉刷效率是人工的1.64倍,机器和人工均具有很高的合格率,但机器更胜一筹。在消耗方面,机器因粉刷较为均匀且通过管道供给,避免了油漆的洒落[7],从而在油漆消耗方面比人工粉刷低。
7 结论
(1)以连杆机构和仿生学为切入点,采用伺服电动机与连杆的多样化组合设计了集粉刷、升降、供给为一体的室内墙漆自动滚刷装置,提高了室内墙壁粉刷效率[8]。(2)运用UG建立了静态物理模型,并通过ADAMS仿真,对粉刷机构的受力、位移和速度等方面进行分析,验证设计方面的合理性。(3)制造样机一台,并进行室内刷墙实验,并与人工数据进行对比,用事实来证明装置的可行性和合理性。
猜你喜欢
四川建筑(2021年1期)2021-03-31 01:01:46
建筑机械化(2020年7期)2020-08-15 06:41:32
决策探索(2019年17期)2019-09-20 02:56:46
中学生数理化·八年级物理人教版(2018年5期)2018-06-21 08:01:38
科技创新与品牌(2016年8期)2016-09-29 22:25:52
中学生数理化·高一版(2016年10期)2016-03-01 03:45:54
工程建设与设计(2016年1期)2016-02-27 10:50:15
建筑与预算(2015年8期)2015-12-02 01:49:42
红蜻蜓·低年级(2015年5期)2015-05-25 11:15:45
火炸药学报(2014年3期)2014-03-20 13:17:44
