SEBAPULS雷达水位计的误差分析及水位的自动化校准
2021-07-20 19:54郭秋歌王小远
河南科技 2021年4期
郭秋歌 王小远
摘 要:在明渠流量计算中,水位精度要求高,水位观測数据必须及时更新。这对水位观测数据的及时性和有效性提出了较高的要求,传统的人工测量已经不能满足当前需求。本文以德国希贝SEBAPULS雷达水位计为例,采用目标实时校准法,分析雷达水位计测量误差来源并进行校验,并通过编程将水位计测量值传输到上位机,实现水位数据的远程传输及自动化处理。
关键词:雷达水位计;目标实时校准法;PLC上位机;比测分析
中图分类号:P335.1文献标识码:A文章编号:1003-5168(2021)04-0079-03
Abstract: In the open channel flow calculation, the water level accuracy is required to be high, and the water level observation data must be updated in time. This puts high demands on the timeliness and effectiveness of water level observation data, and traditional manual measurement can no longer meet current needs. This paper took the German SEBAPULS radar water level gauge as an example, adopted the target real-time calibration method, analyzed the source of the radar water level gauge measurement error and performed verification, during which the measured value of the water level gauge was transmitted to the upper computer through programming, so as to realize the remote transmission and automatic processing of water level data.
Keywords: radar water level gauge;target real-time calibration method;PLC upper computer;comparison analysis
明渠流量测定和计算对防洪抗旱有着重要的作用,其中,水位测定是明渠流量计算的一个关键环节。传统的水位测定方法主要有速度-面积法、水坝和水槽法、动船法等[1]。传统方法通常通过人工现场测量完成,这使得数据的及时性和有效性面临巨大考验。近年来,随着雷达水位计、超声波水位计在水利工程应用上的广泛普及,越来越多的水利工作者采用水位计观测数据代替人工观测数据,以实现水利工程的智能化管理。有研究[2-3]通过比较测量法分析验证,给出雷达水位观测数据可作为正式水位观测数据的依据,实现误差允许范围内水位数据的自动化处理,提高工作效率,改善黄河上游水文站的水位测报条件。赵安林等[4]利用双目标实时校准法,抵消由声速引起的误差,从而减小整个水位计的测量误差,使雷达水位观测数据能够更准确地代替正式水位观测数据。
德国希贝SEBAPULS雷达水位计是一种高精度的非接触式水位测量仪器,其突出的优点是实现非接触测量,安装方便,利用电磁波探测距离,不受温度、湿度、气压、雨雪和风沙等环境因素的影响,可直接测量自然河道水位,实现水位数据的远程传输及自动化处理。此外,SEBAPULS雷达水位计具有水位跟踪速度快、非接触测量以及受风、沙、温度和漂浮物的影响小的特性,很适合在黄河中上游温差大的常年无封冻河段上使用。本文以德国希贝SEBAPULS雷达水位计为例,通过编程将其测得的水位数据传输到PLC上位机[5],并采用目标实时校准法[4]对雷达水位计测量的误差来源进行分析、校验,从而实现水位数据的远程传输及自动化处理。
1 工作原理
雷达水位计也叫水位雷达,是利用电磁波探测目标的电子设备。它主要用于水文监测、污水处理和防洪预警等。雷达水位计的主要测量原理是雷达水位传感天线发射电磁波脉冲,其在空气介质中传播,遇到水面,在界面处将产生反射,部分电磁能被反射至发射源。经测定,电磁波在水位计和水面之间往返传播的时间为[T],由于电磁波的传播速度[C]是个常数,因此人们可以测出水位计与水面之间的距离[H]。
2 测量方法
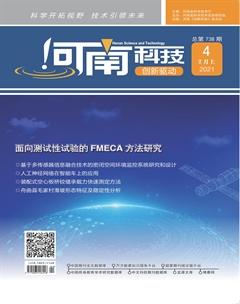
如图1所示,本研究利用雷达水位计测量水位[h水位]。假设闸底板的高度为[h闸底板],水位计杆底端到闸底板的高度为[h1],水位计挂杆长为[L],水位计自身长为[h2],水位计挂杆底端到闸面的距离为[Δ]。下面采用双目标实时校准法,对雷达水位计测量的水位[h水位]与水尺测量的水位[h水尺]进行比较,以修正水位[h水位],完成水位测量。其具体过程如下:利用水准仪测出[h闸底板]、[h1]、[L]、[h2]和[Δ];计算[h水位=PLC-10 000-A×0.00 15-h闸底板],其中,[PLC=h闸底板+h1+L-h2+Δ],[A]为雷达水位计输出值;通过水尺测量水位[h水尺];采用双目标实时校准法校准[h水尺]和[h水位]。
3 误差分析
本研究利用雷达电磁波传播反射原理设计地水位计,其测量精度高低取决于对影响因素的处理方法。此外,电磁波往返传播时间[T]是另一个主要的影响因素。赵安林等[4]利用超声波测量发射源至液面的距离[H],通过双目标实时校准法修正了测距,采用石英晶体器件减小时间[T]的误差。本文先通过水准仪测出水位[h水尺],再利用雷达水位计输出值[A],通过小节2方法计算出水位值[h水位],最终校准[h水尺]和[h水位]。采用本文的测量方法能够避免时间[T]带来的误差,更精确地得到测量数据。
影响因素的处理方法主要涉及水位计探头到液面距离[H]的处理。一般来讲,风、沙、温度和漂浮物对雷达水位计的影响可以忽略不计,水位计安装的位置(探头倾斜、安装杆倾斜)是一个比较大的影响因素。本文重点分析两种对参数[H]影响较大的情形并给出校准方案。
假设水位计横杆和探头安装无误,如图1所示,则有水位计[h水尺=h水位]。
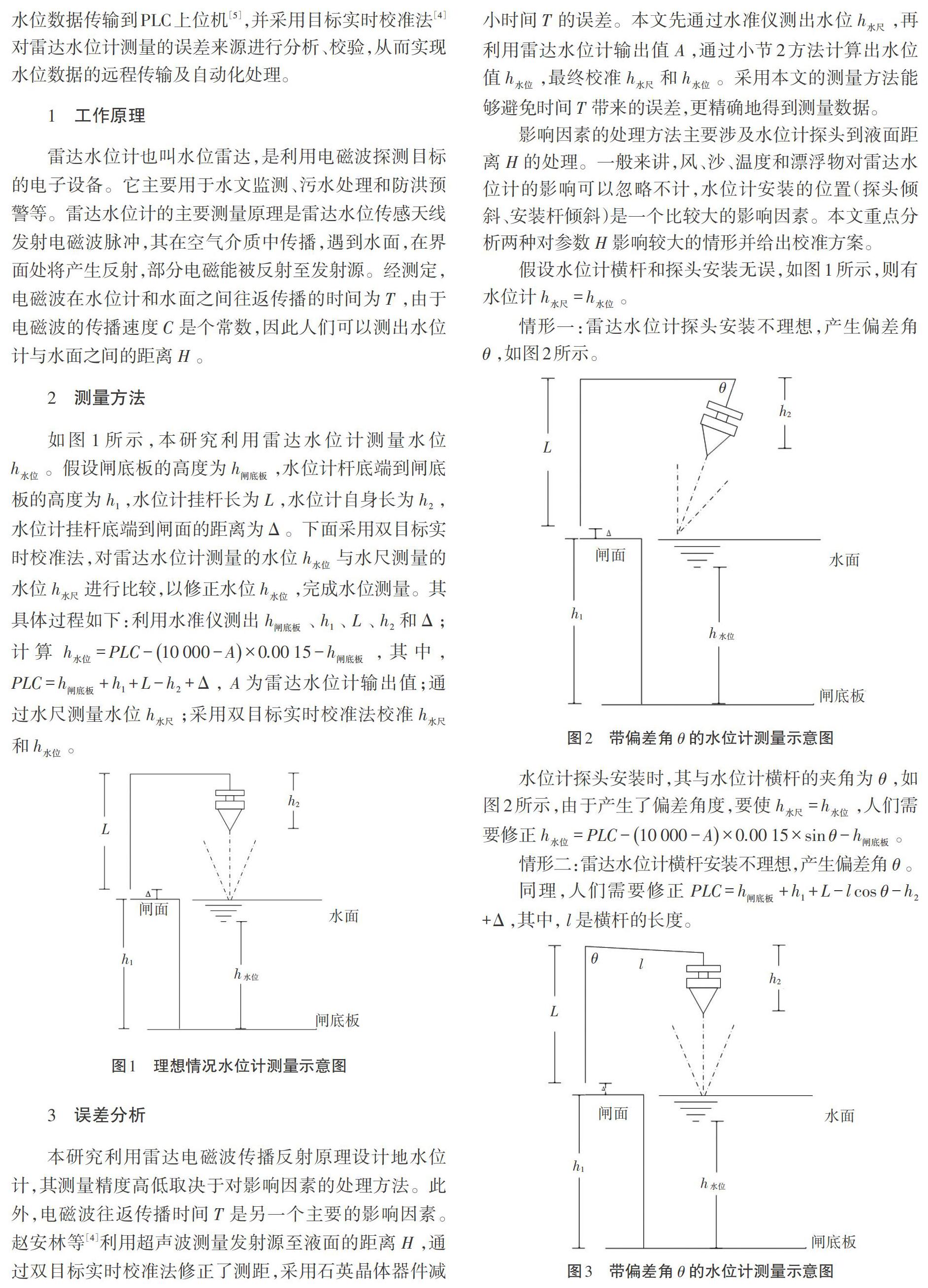
情形一:雷达水位计探头安装不理想,产生偏差角[θ],如图2所示。
水位计探头安装时,其与水位计横杆的夹角为[θ],如图2所示,由于产生了偏差角度,要使[h水尺=h水位],人们需要修正[h水位=PLC-10 000-A×0.00 15×sinθ-h闸底板]。
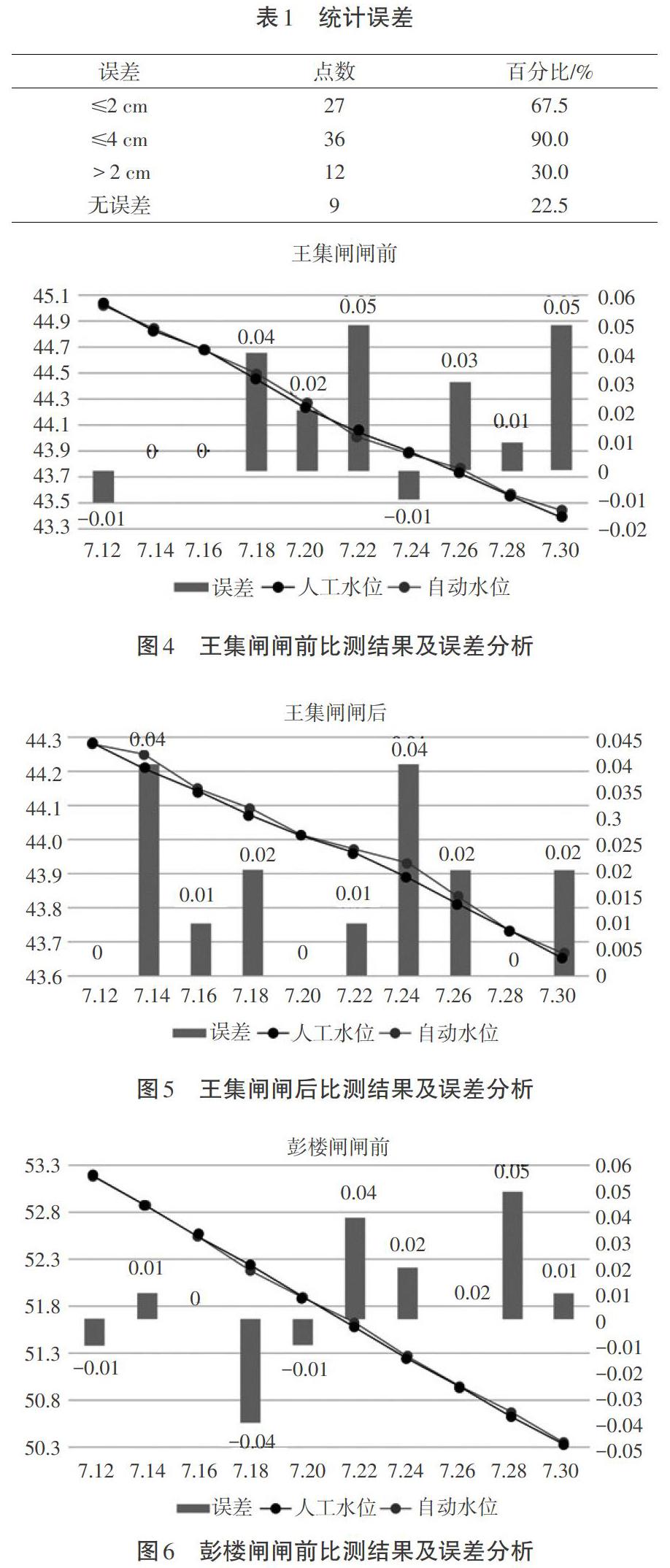
情形二:雷达水位计横杆安装不理想,产生偏差角[θ]。
同理,人们需要修正[PLC=h闸底板+h1+L-lcosθ-h2][+Δ],其中,[l]是横杆的长度。
4 试验数据分析
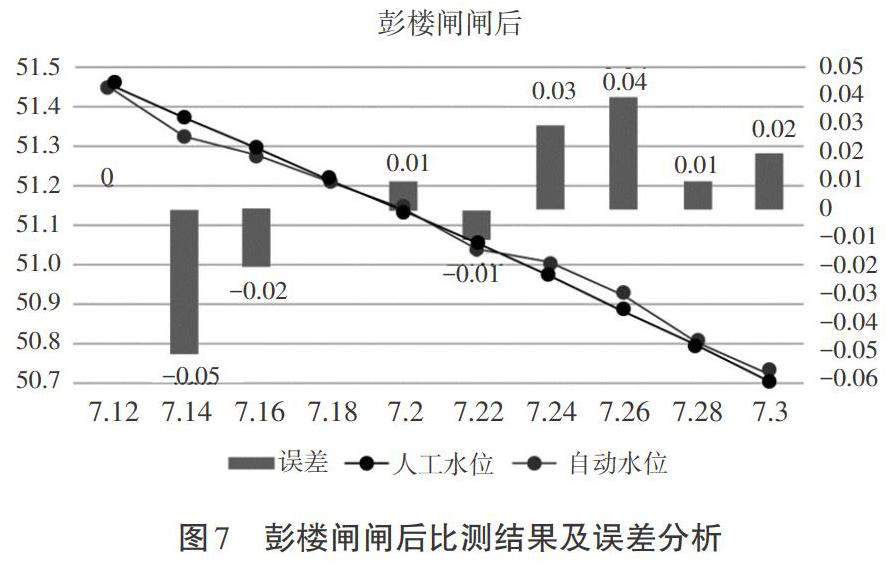
本文以南小堤、彭楼两处作为验证点,利用水准仪测出[h闸底板]、[h1]、[L]、[h2]和[Δ]。下面对水尺测量出来的水位[h水尺]与雷达水位计测出的水位[h水位]进行比测,水尺测量出来的水位[h水尺]表示人工水位,雷达水位计测出的水位[h水位]表示自动水位,比测结果如图4、图5、图6和图7所示,统计误差如表1所示。
经过校准后,自动水位显示的读数曲线与人工水位显示的读数曲线基本一致,但并没有完全重合,这是因为受环境(风、沙、温度、漂浮物)的影响,水位计产生小幅度波动。此外,人工水位的小数点后的数值是通过人工估读出来的,可能会造成5 cm以内的偏差。渠道水位在一天中是连续变化的,而人工水位只在一天当中特定的离散时间点读取,与自动水位(通过PLC采集记录并求出不同时间段的水位)相比,会产生一定的误差。这也是产生误差的另一个重要因素,总体说来,自动水位可靠性更高。
通过表1可以看出,在15 m变幅范围内,SEBAPULS雷达水位计测定误差小于或者等于±4 cm的保证率为90%,误差小于或等于±2 cm的保证率为67.5%。无误差的保证率达到22.5%。其精度指标达到了水文测验规范要求,证明了自动水位值的有效性和科学性。
5 结论
本文利用德国希贝SEBAPULS雷达水位计,采用目标实时校准法对雷达水位计测量误差来源的几种重要情景进行探究,并给出校验方法,开展误差分析。数据分析显示,其精度满足水文测验规范要求。最后通过编程将水位计测量值传输到上位机,实现水位数据的远程传输及自动化处理。
参考文献:
[1]徐俊林,陈红勋,马峥.明渠流量的研究现状和进展[C]//第十六届全国水动力学研讨会.2002.
[2]贾康中.雷达水位计在黄河上游小川、兰州水文站的应用[C]//全国水文泥沙文选.2010.
[3]权雄章,郭云杰,刘文洲.SEBAPULS20型雷达水位计在民和水文站的比测分析及应用[J].甘肅水利水电技术,2010(1):11-12.
[4]赵安林,白东义.HW-1000型非接触式超声波水位计测量误差分析与检验[J].水利水电技术,1995(7):2-5.
[5]杨涛,王笑.PLC S7-300在前湖水闸控制系统中的应用[J].江西水利科技,2011(3):211-213.