
浅谈雷达和ADS-B信号监控系统
2021-07-19 22:54朱翊
电脑知识与技术 2021年13期
关键词:自动化
朱翊

摘要:随着航班流量的日益增多,空域环境的日渐复杂,一旦雷达信号或ADS-B信号中断未能及时处理,将会造成严重的影响。雷达和ADS-B信号监控系统有着广泛的应用前景,可推广至各个空管运行单位、部队、气象中心等使用,提高运行保障能力。本文就湛江空管站近期主、备用自动化接入的ADS-B信号,谈一下ADS-B信号接入自动化的配置等问题,以供分享与探讨。
关键词:ADS-B信号;雷达信号;自动化
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2021)13-0170-04
1引言
ADS-B系统是由多地面站和机载站构成,是一种合作监视技术。飞机定时广播通过卫星导航系统获得的位置信息(位置、高度、速度、航向、识别号及其他信息);与传统雷达系统相比,ADS-B不仅提供更实时准确的监视信息,还具有建设成本少、数据精度高、使用寿命长等明显优势。近些年我国对ADS-B技术进行大量的研究,已研制出ADS-B发射和接收设备;并通过地空数据链将信号下发给地面站,经过数据中心的目标检测和多重验证后再进行应用。在空中,相比传统A/C模式雷达信号,ADS-B信号对于频率的占用率大大减少,信号纠错和解码能力将增强。在地面,利用ADS-B数据源,能加强对场面运行航空器的监视,减少地面冲突的发生。ADS-B技术作为一种新型的监视方式,它是基于卫星导航和地空数据链通信系统,能有效克服由于雷达测距定位位置信息不准确的缺点,且具备更高的数据精度和数据更新率。实时的飞行位置等数据,能够提高飞行效率。
2湛江ADS-B系统架构介绍
湛江地区ADS-B系统共建设地面站3个,三级数据站1套,其中定向+全向配置地面站点1个,全向配置地面站点2个,已完成现场验收工作,并已在AeroTrac自动化系统测试平台中接入ADS-B信号,已完成了主用自动化系统、备用自动化系统的接入参数配置。
2.1 ADS-B地面站系统
ADS-B监视在湛江有三个地面站分别在:江洪、下洋、航管雷达站;各地地面站通过FA36传输系统以及光纤、运营商进行信号传输。其中航管雷达站又有定向地面站和全向地面站,它们分别由定向子系统、全向子系统、本地监控维护终端以及其他设备组成。
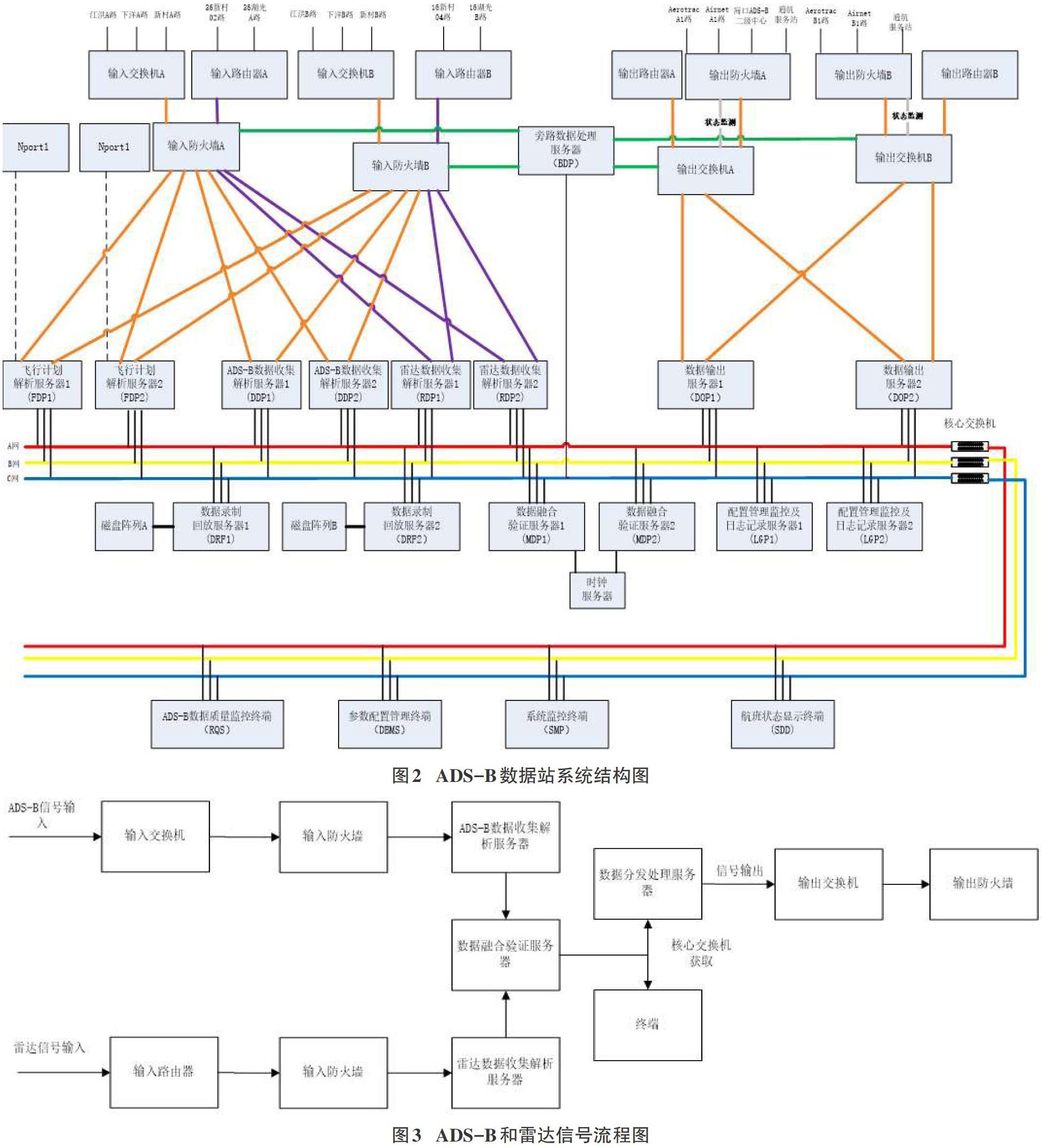
2.2 ADS-B数据站系统
ADS-B数据站能够根据实际应用需求引接ADS-B地面站数据,经过处理后为所辖地区的中低空管制中心、进近、塔台等空管部门提供ADS-B实时综合监视信息,同时实现对本区域内ADS-B地面站的监控。
2.3 雷达信号、ADS-B信号在数据站接入、融合
江洪、下洋、新村三路ADS-B信号和新村、湖光两路信号分别通过交换机、路由器、防火墙输入到DDP进行数据解析、融合验证。融合为一路的ADS-B信号分别输出给二级中心站海口、通航服务站、主备用自动化使用。ADS-B和雷达信号流程如图3所示。
3 ADS-B数据站系统关键性功能
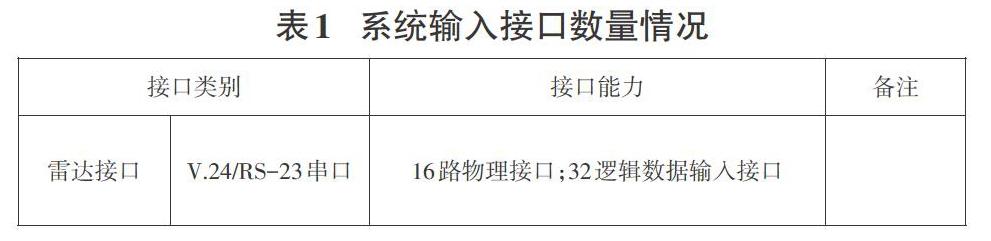
3.1數据接入能力
湛江空管站三级数据站的输入接口数量设计情况如表1所示:
3.2数据验证功能
系统具有目标信息防伪处理功能,通过多种方式来甄别可疑的ADS-B目标报告。被判定为可疑的目标在本系统的态势界面上予以醒目的提示,并同时说明判定依据。在向系统外输出数据时,可人工控制可疑目标是否输出。
系统采用的可疑目标验证方式为以下三种:
(1)覆盖符合性验证:
如果地面站定义了最大有效覆盖范围,则当其报告的某个目标不在这一范围内时判定为未通过此项验证。
(2)覆盖交叉验证:
在ADS-B和雷达等其他监视数据的重叠覆盖范围内,ADS-B发现了目标但其他监视数据没有发现,则此目标判定为未通过此项验证。
(3) TDOA时标定位验证:
某个ADS-B目标的位置报告与利用高精度时标进行的多地面站定位计算出的结果不符,则判定为未通过此项验证。
以上三种目标验证方式在对最终目标是否可疑的结论的影响上具有不同的优先级。TDOA时标定位验证具有最高的优先级,覆盖交叉验证其次,覆盖符合性验证最低。
湛江空域实际的目标数据验证情况统计如下(6小时):
说明:可疑目标包括TDOA时标定位验证、覆盖交叉验证、覆盖符合性验证三种情况。未知目标为航迹刚开始建立时,需要一个周期来进行确认。湛江目标验证情况未知是由于系统设置为4个以上站点时系统进行TDOA验证。
3.3数据融合功能
理论定义上,系统融汇规则是“当确定了多个ADS-B数据为同一时刻的同一目标之后,将其汇成一个ADS-B点迹,系统获得关于目标更准确,全面的信息。系统能够处理重复、跳变等异常数据。对某个目标同一时刻的数据,各地面站接收的ADS-B数据是一样的,理论上从不同地面站发出的数据内容也应该一致”。然而实际上,不同地面站的报文版本可能并不一致,高版本的相对低版本的信息更全面。另外一方面,有些基站可能长时间未收到某类信息,使得该基站不含有该信息或该信息保持了历史的而未被更新。因此在数据融汇时主要完成两个工作:
(1)在所有接收到的地面站数据中,如果有高版本的目标数据,优先在高版本地面站中选择距离目标最近的站点作为优选站点。如果没有高版本的基站数据,或者说只有0.26版本的数据,则选择离目标最近的站点作为优选站点除航班号、二次代码、高度、速度、航向等信息外,其他信息使用优选站点的数据。
(2)优选站点中可能并不包含航班号、二次代码、高度、速度和航向信息,或者即使包含了该信息,但可能也是被保持的历史数据。这几种类型的数据由收到的所有基站信息融合而成。当某一个基站中包含该信息时,则综合包含该信息。当不同基站含有的同类信息不同时,如某些基站收到了更新的二次代码,但有些基站未收到,使得不同基站的二次代码不同,综合选择时尽可能地选择更新的二次代码作为综合数据。
4 ADS-B(雷达)信号配置实例
本实例描述在多冗余备份RDP系统中如何增加一路ADS-B信号(雷达),并配置其端口接入,并相应的修改DP工作站雷达显示列表的过程和步骤。为了运行 configure_radars指令,RDP服务器需要设为脱机。一般情况下,增加或更改雷达配置参数首先在RDP备机上执行,修改完毕后,再通过服务器主备切换,更改剩下其余的RDP。这样做,可以使修改参数对运行的影响时间达到最小。如有条件,可在测试平台先行修改,观察参数修改后系统运行情况。
4.1 ADS-B信号(雷达参数)配置
(1)确定服务器以ATCsite用户登录,并在工作目录:/export/home/ATCsite;
(2)通过kill_rdp指令使需修改参数的RDP服务器处于脱机状态;
(3)在RDP上执行configure_radars来设置需要的ADS-B配置;
(4)通过configure_radars菜单Add a radar增加一路雷达来配置ADS-B信息;
(5)通过configure_radars菜单Add a port connection增加一个ADS-B端口连接信息;
(6)通过configure_radars菜单List port assignment,检查并确认新增ADS-B参数及端口数据无误。
(7)通过exit选项离开configure_radars菜单配置完成后会在/export/home/ATCsite目录下生成一个input***.dat的文件,***对应的是端口号,将该端口号填入Wan_rcvr_config0文件中(link项),为ADS-B配置和网络配置之间建立联系。
4.2 网络配置
(1)配置 /etc目录下的网卡文件hostname.ce2(ce2目前可用于接收ADS-B信号)。
(2)将hostname.ce2命名为hosts文件所用名(rdp01_adsb)。
(3)配置 /etc目录下的hosts文件,在该文件下增加一行 “192.168.9.50 rdp01_adsb”与ADS-B转发器广播的IP地址处于同一个网段。
(4)配置 /export/home/ATCsite目录下的Wan_rcvr_config0文件,该文件说明如图4所示。
l该文件第一行为网卡名,如将ADS-B配置在hostname.ce2,则应在第一行填入hostname.ce2文件内容:rdp01_adsb,该名字应于LAN_NIC_MAP.DAT中的网卡名相同;
l该文件第二行为链接号,这个与configure_radars中指定的ADS-B端口号相同;
l该文件第三行为ADS-B网络接收的端口号,该端口号应于ADS-B转发器所用的广播端口号一致,目前使用33000端口;
l第四行为网络接收方式,B:广播方式接收,M:组播方式接收;
l第五行为组播地址;
l该文件的最后一行是-1,代表文件结束。
注:之后添加链接无须再填入网卡名,直接填入连接号、端口号、广播或组播和地址即可。
(5)配置 /export/home/ATCsite目录下的LAN_NIC_MAP.DAT文件,该文件说明如图5所示。
lLANNAME对应Wan_rcvr_config0文件的内容rdp01_adsb;
lNIC对应网卡文件名后缀,ce2;
l该文件的最后一行是-1,代表文件結束。
(6)重启RDP主机,在RDP上执行rdp&指令来启动RDP程序,此时,增加ADS-B配置已生效。
4.3 DP工作站雷达列表更新
4.4再新增一路ADS-B信号
(1)新增hostname.xxx文件,在hosts文件中新增。
(2)拷贝Wan_rcvr_config0,重命名为Wan_rcvr_configX(X=1至63),修改相应的网络参数,如下图新增的一路。
(3)在LAN_NIC_MAP.DAT新增网络对应关系如下图;
5空管自动化系统ADS-B数据应用
现阶段我们湛江将ADS-B接入主用自动化系统中作为一路监视使用,这一举措大大增强了对于监视目标的覆盖能力。也解决了长期因湖光雷达停机维护导致低高度目标看不见的问题。目前接入后存在的问题主要有:主用Telephonics自动化系统不处理“Target Report Descriptor”的Ground Bit项,在DP上仍显示Ground Bit=1的航迹。在Telephonics自动化系统不可能进一步升级的情况下,ADS-B数据站厂家已于2019年4月初升级软件,在ADS-B数据站系统中增设屏蔽地面目标选项,进而在输出到自动化系统前对地面目标“Ground Bit=1”的航迹进行过滤。解决了不必要的地面目标对管制的干扰问题。并且在2019年9月份进行了一次全系统升级,优化各个系统机制,增加了对GNSS完好性和精度不足的ADS-B信息进行过滤功能;可疑目标判定时,采用对不同空域类型采用不同参数。
信号接入系统后,并且以特定符号显示和区分单雷达目标、ADS-B和雷达的融合目标、雷达融合目标。系统会将雷达数据与 ADS-B 数据进行融合处理,产生的系统航迹质量会不低于参与融合处理的任何一个监视数据的航迹质量;航空器下发ADS-B位置报告数据的NUC、NIC、SIL应当满足规章要求,通常ADS-B位置报告数据的NUC值不得低于5或者NIC值不得低于6或者SIL值不得低于2。如果位置报告数据的精度低于以上的数值,则在管制员的人机界面上显示ADS-B位置报告,并给予视觉提示。
6结语
广播式自动相关监视ADS-B作为空管监视新技术逐渐应用推广;ADS-B系统是下一代航空运输系统通信协议的一部分,我国近些年已研制出ADS-B发射和接受设备。提高ADS-B系统检波能力能够提高ADS-B系统的接收范围和数据解算精度,对飞机进行准确定位具有重要的意义,尤其是在干扰信号复杂、雨天、雾天等遮挡。此外,还能有效克服由于雷达测距定位位置信息不准确的缺点,且具备更高的数据精度和数据更新率。目前湛江空管站已于2020年初,将ADS-B信号全高度接入主备自动化系统,为管制员提供了多种监视保障;与雷达监视相辅相成,降低了因设备影响空中交通管制的风险概率。
参考文献:
[1] 邱志豪,李百锋,王剑峰.空管ADS-B地面站设备测试平台的研究与实现[N].“安康杯”论文集,2016年12月.
[2] 余阗.浅析乌鲁木齐空管中心ADS-B接入自动化系统优化与研究[J].科技创新与应用,2017(31):193-194.
[3] 胡洋.ADS-B数据处理中心的设计与实现[J].电子测试,2018(4):80-82,89.
[4] 宫利苹.南京ADS-B数据站功能及接入自动化系统的分析[J].中国科技纵横,2019(13).
【通联编辑:梁书】
猜你喜欢
经营者(2016年12期)2016-10-21
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
科学与财富(2016年28期)2016-10-14
