
基于IMM Kalman滤波算法的实时追踪监控系统
2021-07-19 10:13张凯丽程雅茹孙晨静陈亚宁纪亚芳
电脑与电信 2021年5期
张凯丽 何 玥 程雅茹 孙晨静 陈亚宁 纪亚芳
(山西师范大学物理与信息工程学院,山西 临汾 041000)
1 引言
随着各行各业的飞速发展,国家对人民的人身安全、财产安全的重视不断提高。视频监控已经从最初只在特殊行业中使用,发展为各行各业的必备产品。但是在这种社会背景下,依然有不法分子顶风作案,拐卖儿童、入室抢劫等案例仍然存在。
在寻找走失儿童与抓捕罪犯的过程中,最常用的方法是通过监控视频观察。监控视频中记录了他们犯罪的证据,但是在查看监控回放时,人力监测耗时耗力,容易错过最佳时期,监测过程难免有疏忽遗漏的地方,因此对监控系统的优化是必要的。针对普通监控系统所存在的缺陷,本文采用SAD匹配算法和IMM Kalman滤波算法,对现有的监控系统进行了优化,实现了对监控范围内重点目标全程持续跟踪和信息捕捉,进而完成视频分析。
2 目标检测
目前,对收集到的数据进行前期3D 标定的方法为单目视觉或双目立体视觉。为克服仅使用单目视觉无法对目标精确追踪的缺点,本文采用双目立体视觉方式。双目立体视觉的重点是进行立体匹配,本文通过采用SAD(Sum of Absolute Differences)匹配算法确定左右视图匹配关系,从而实现双目立体视觉目标检测。
SAD匹配算法是将模板图样I(尺寸为m*n)与待检索图样I’(尺寸为M*N)进行对比,寻找出最佳匹配图样。具体算法步骤如下所示:
(1)将待检索图样和模板图样通过卷积神经网络选择出所有像素点;
(2)将模板图样灰度减去待检索图样灰度,求出二者灰度差之和[1]

其中i,j 表示子图的中心坐标,1≤x≤M-m+1,1≤y≤N-n+1。
(3)移动模板图样,采用(1)中SAD匹配算法选择出模板图样中的所有像素点,并重复步骤(2);
(4)当SAD值最小时,则为待检索图样的最佳匹配。
3 目标追踪
目标追踪算法主要是对目标的外观进行追踪,目标外观不被遮挡属于理想情况。在实际检测中,由于受外界因素干扰,目标常会受到遮挡,使追踪出现失效情况,此时可利用IMM Kalman滤波算法修正失效段,对追踪过程进行优化。
3.1 有效性判断
在SAD匹配算法的基础上,采用一种有效性判断方法,其方法的一般步骤如下:
(1)将目标检测时计算的所有SAD值列成矩阵(设模板图样T大小为a*b,待检索图样S大小为A*B),则可知矩阵大小为(A-a+1)*(B-b+1);
(2)找出SAD最小值在矩阵中的位置坐标(x,y);
(3)在SAD 矩阵中,以最小值(x,y)为中心点,取一个一定大小的矩阵Gi(矩阵Gi的大小不能太小,否则变化不明显,无法更准确地判断有效性),用Gi来表示某一帧的图像。将矩阵分块,选取不同大小的矩阵,根据选取的矩阵,设置不同大小的权重系数,这就提高了目标跟踪的准确性,减少了目标跟踪过程中受到遮挡等干扰因素的消极影响;
(4)模板图像是从第1帧图像获取的,以第1帧图像对应的G1为依据,与其他帧图像对应的矩阵Gi采用归一化互相关的方法进行计算,公式[1]为:
(5)计算模板T的像素平均值[1]:

计算相关性阈值[1]:

将每帧图像对应的Ri与RT进行比较,若Ri≥RT,则相关跟踪有效,否则相关跟踪失效。
3.2 IMM Kalman滤波算法
Kalman 滤波算法是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态进行最优估计的算法[1]。由于观测数据中存在系统噪声和干扰的影响,所以最优估计也可看作是滤波过程。在目标追踪时,可通过Kalman 滤波算法进行动态估计。当目标的运动模型服从高斯分布时,对其运动状态进行预测,将预测模型与观察模型进行对比,根据误差来更新运动目标的状态。由于Kalman 滤波算法一般适用于线性系统,而线性系统属于理想情况,因此在实际应用中存在一些弊端。
本文采用的是IMM Kalman 滤波算法,IMM Kalman 滤波算法是1984年H.A.PBlom基于Kalman滤波算法而提出的一种新型滤波算法。该算法克服了Kalman滤波算法的局限性,通过对多个模型的估计结果进行加权平均,对动态系统进行更优的估计,从而得到更理想的效果。
IMM Kalman滤波算法的一般步骤如下:
(1)设跟踪目标运动状态有m种,与之对应m个运动模型,第j个模型可用如下公式[1]表示:

其中Φj(k)是状态转移矩阵,Wj(k)~(0,Qj)是满足高斯分布(均值为0,协方差矩阵为Qj)的白噪声序列,Gj(k)是噪声驱动矩阵,H(k)是系统模型,V(k)是观测噪声。
(2)m种模型间的马尔可夫概率转移矩阵为:

其中pij表示由第i个运动模型转移到第j个运动模型的概率。
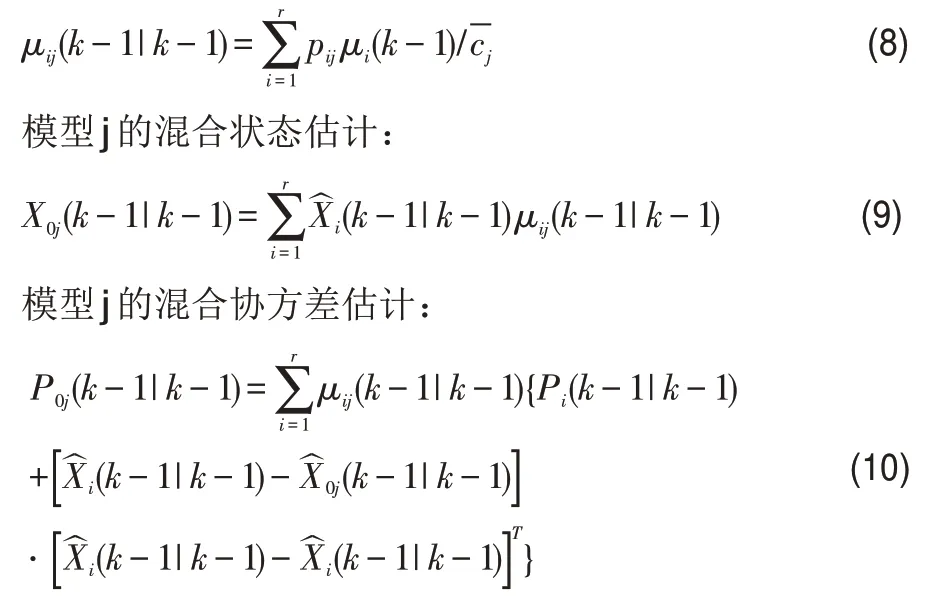
(3)由上一步模型概率μj(k-1)得到模型j的预测概率pj,计算出模型i到模型j的混合概率μij(k-1),结合目标的状态估计得出模型j的混合状态估计,从而得到模型j的混合协方差估计。
模型j的混合状态估计:
(4)以模型j的混合状态估计、混合协方差估计以及量测方程Z(k)作为输入进行Kalman 滤波,更新预测状态和滤波协方差。

(5)采用似然函数(Likelihood function)对μj(k)进行更新。
模型j的似然函数:
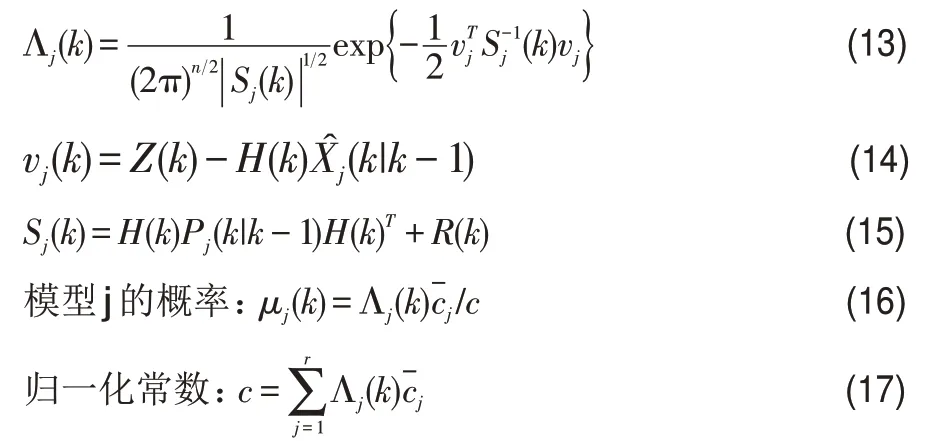
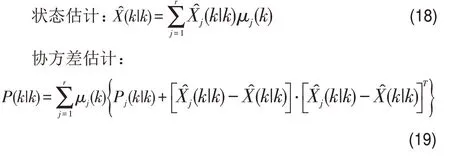
(6)通过对模型j 进行输出交互,计算多个模型估计结果的加权平均值,得到总的状态估计和协方差估计。
在追踪监控过程中,采用SAD匹配算法和IMM Kalman滤波算法相结合的方式,不断更新目标的概率,从而优化目标追踪的精确度。
4 仿真分析
4.1 SAD匹配算法仿真
用相机平行移动拍摄得到监测目标的左、右两幅视点图像,通过MATLAB对SAD匹配算法进行仿真,结果图1、2所示。

图1 不受遮挡的监测目标

图2 受遮挡的监测目标
如图1、2所示,以左目图像的源匹配点为中心,定义一个窗口,通过移动右目图像逐步计算灰度差值,从而寻找最佳匹配点。仿真得到不同状态下监测目标的检测结果,当目标不受遮挡和受遮挡时,SAD匹配算法都可以无失真地检测出目标。由此可见,SAD匹配算法可实现对目标的检测功能。
4.2 IMM Kalman滤波算法仿真
将目标运动轨迹划分成三个模型:匀速直线运动(模型一),右转(模型二),左转(模型三)。
0~20s,目标向右前方做276m/s 的匀速直线运动;第20s时,改变其运动方向;20s~60s,向左前方做247m/s 的匀速直线运动;第60s时,再次改变目标的运动方向;60s~100s,向右前方做247m/s的匀速直线运动。
图3为目标运动轨迹追踪示意图,由图可知滤波值与目标真实轨迹偏差较小。
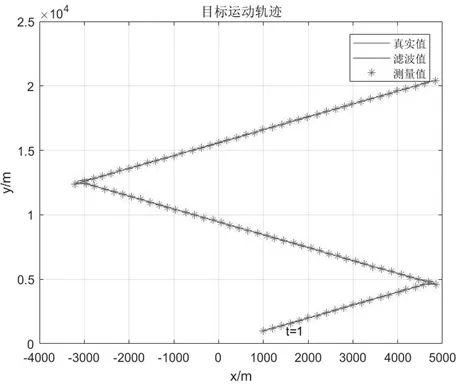
图3 目标运动轨迹
图4和图5分别为追踪过程中目标位置和速度的误差分析曲线。从图中可以看出,目标在做匀速直线运动时,误差值均在0值附近波动,且时间越长误差波动幅度越小,越接近0值;当目标方向突然发生改变时,由于时间较短,变动较大,因此误差值较大;第60s 时相较第20s 时误差值有所下降。分析仿真结果可得,在追踪过程中,随着追踪时间的延长,追踪次数的增加,系统的优化效果会逐渐显著。
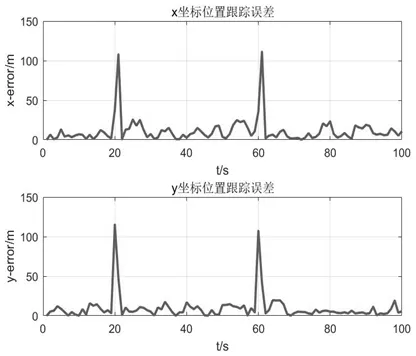
图4 位置跟踪误差
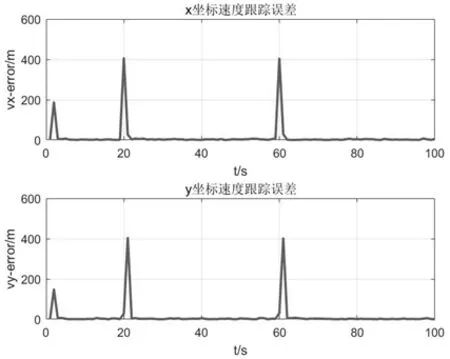
图5 速度跟踪误差
图6 为IMM Kalman 滤波算法模型概率曲线,从图中可以看出,在目标做匀速直线运动的过程中,模型一概率接近100%;在20s时目标左转,模型一概率逐渐降低,模型三概率逐渐提高,最终模型三概率接近100%;60s时刻目标右转,模型一概率逐渐降低,模型二概率逐渐提高,最终模型二概率接近100%。
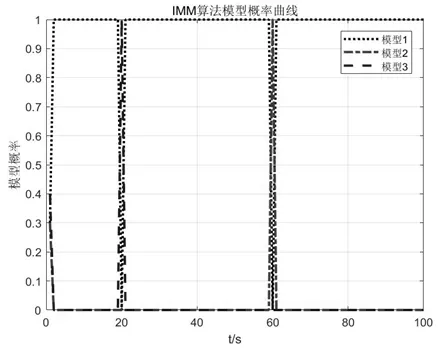
图6 IMM Kalman滤波算法模型概率曲线
5 结论
由仿真结果可知,SAD 匹配算法能确定目标位置,可以用于目标检测。IMM Kalman 滤波算法能修复失效段,可以用于目标追踪。通过仿真软件进行验证,结果表明,在监控设备的辅助下,该系统对监控视频中某目标可以实现检测与追踪功能,具有现实意义。但系统尚未进行实物测试,仍停留在仿真研究阶段,实际测试情况有待进一步研究。
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
机械工程师(2020年4期)2020-05-08
智能制造(2016年6期)2016-08-03
项目管理技术(2016年6期)2016-05-17
海军航空大学学报(2015年1期)2015-11-11
空间控制技术与应用(2015年3期)2015-06-05
遥测遥控(2015年2期)2015-04-23
