
下肢外骨骼机器人驱动方式及发展前景
2021-07-17 10:43宋品清黄建昌
河南科技 2021年7期
宋品清 黄建昌


摘 要:近年来,下肢外骨骼机器人的应用越来越广泛。研究者把下肢外骨骼机器人的驱动方式分为四类,即液压驱动、气压驱动、电机驱动及人工肌肉驱动,并分别介绍了这四种方式的工作原理,阐述其优缺点,最后对其未来的发展趋势进行展望。
关键词:下肢外骨骼机器人;驱动方式;液压驱动;气压驱动;电机驱动
中图分类号:TP242文献标识码:A文章编号:1003-5168(2021)07-0006-03
Lower Limb Exoskeleton Robot Driving Mode and Development
Prospect Analysis
SONG Pinqing HUANG Jianchang
(Hebei Agricultural University,Cangzhou Hebei 061000)
Abstract: In recent years, lower limb exoskeleton robots are being used more and more widely. Researchers divided the driving modes of lower limb exoskeleton robot into four categories, namely hydraulic driving, pneumatic driving, motor driving and artificial muscle driving. The working principles of these four modes are introduced respectively, and their advantages and disadvantages were described. Finally, the future development trend was prospected.
Keywords: lower limb exoskeleton robot;driving mode;hydraulic driving;pneumatic driving;motor driving
近年來,下肢外骨骼机器人作为一种辅助设备被广泛应用于各个行业,在军事、医疗领域尤为常见。它是一种可穿戴的机械装置,灵感来源于一些动物自身的外骨骼,结合动力学、仿生学等学科制造,在辅助运动及康复方面有着重要应用[1]。按照驱动方式,可将下肢外骨骼分为四类,即液压驱动、气压驱动、电机驱动以及人工肌肉驱动[2]。本文对下肢外骨骼机器人的驱动方式进行了阐述。
1 下肢外骨骼机器人驱动方式的分类
1.1 液压驱动
在当今机器人和自动化应用中,非常注重高功率-质量比[3]。而液压驱动存在较大的功率-质量比,可以提供良好的运动速度和坚固性,同时确保了可靠性。液压驱动通过流体介质传递能量,从而实现传动。液压驱动方式的工作原理如图1所示。液压系统主要包括液压泵、液压缸和电磁换向阀等元件(如图2所示)。液压泵是动力元件,主要向整个液压系统提供动力;液压缸是执行元件,将系统内液体的压力能转换为机械能,使外骨骼的两条下肢绕关节轴转动;电磁换向阀包括压力控制阀、流量控制阀和方向控制阀,分别控制着液体的压力、流量以及方向。
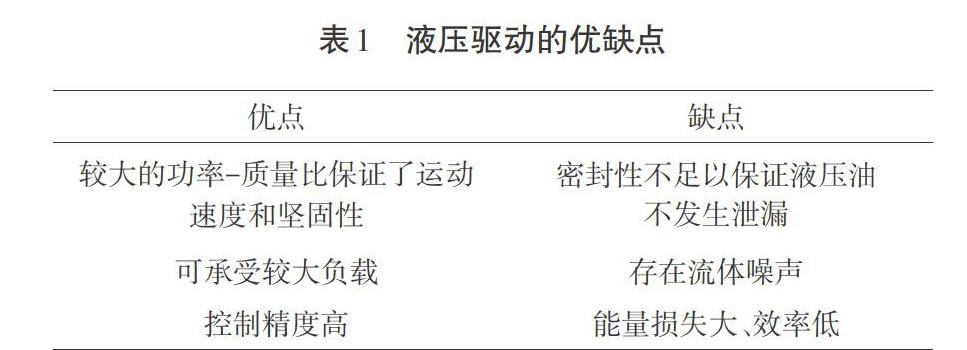
液压系统控制外骨骼的每个关节,膝关节的数字液压缸支持穿戴者实现蹲下和快速行走。液压驱动有着较高的精度和灵敏度,优缺点如表1所示。BLEEX是加州大学伯克利分校研发的液压驱动下肢外骨骼机器人[4],用于行军负重。
1.2 气压驱动
气压驱动使用气体作为介质,原理与液压驱动类似,通过传感器采集穿戴者动作,控制阀控制气体,并推动气缸活塞实现传动,其行走的性能取决于所使用气缸的效率。以机器人Gamma为例[5],其气压驱动系统的重要器件是纺织离合器(Textile Based Clutch,TBC),它是一种真空压力驱动的机械式离合器,通过控制阻塞其机械元件来实现能量的储存和释放。TBC通过真空管线与阀门相连,空气压缩机压缩空气使得TBC系统啮合,在穿戴者运动时,松紧带会变长。
使用空气压缩来产生扭矩可实现外骨骼的轻量化,设计结构简单,反应速度快,并且具有较强的抗冲击性能。由于气体的可压缩性,系统的安全性大大提高,同时降低了设备成本。但是,气动装置控制精度低。
1.3 电机驱动
在下肢外骨骼上安装电机,对髋关节、膝关节和踝关节起驱动作用,通过传感器收集运动信息,发送到控制器和驱动器,分析其运动意图及穿戴者的姿态变化,得出关节的旋转角度,在电机的作用下对各关节发出指令,使外骨骼与穿戴者动作相一致。
电机驱动的优点是应用范围广、控制和维护方便、系统简单、安全性较高,能提供较高的扭矩-质量比;但是其结构复杂,功率-质量比较低,导致难以承担较大负载。
Berkely Bionics公司推出的第三代BLEEX外骨骼HULC是电机驱动方式,但它也含有液压组件。其髋关节和膝关节各有一个液压缸,最大可供负重91 kg,速度可达到4.8 km/h。
由美国范德堡大学研究人员研制的Vanderbilt外骨骼使用了一个齿轮比为24∶1的无刷-直流(BLDC)电机,提供80 N·m的扭矩。角度测量传感器、单轴陀螺仪等器件会在外骨骼的关节处发挥作用。
1.4 人工肌肉驱动
采用人工肌肉驱动方式是近年来出现的一种新型驱动方式,它更多地采用了仿生学设计,模拟了人的肌肉,形成了拟人化的外部机械结构。人工肌肉来回收缩使关节转动,从而实现了外骨骼的运动。目前,国内外主要流行的是气动人工肌肉(PAM),这种驱动方式下的外骨骼机器人集气动人工肌肉、轻型传感器和控制软件于一体,与人类肌肉的运动原理类似,是一种柔性执行器。每个气动人工肌肉对应着人类腿部的肌肉,人工肌腱从气动人工肌肉的末端延伸到脚部,用于移动脚踝。传感器采集穿戴者的信息,改变金属的电阻,从而通过控制软件确定脚踝的位置以及所承受的压力。
气动人工肌肉具有較好的柔顺性,同时也降低了设备重量。这种类型的外骨骼机器人具有优良的功率-体积比和功率-质量比,并且易于维护、响应快速。其不足之处是关节转动范围较小,使用范围有限。
2 对下肢外骨骼机器人的展望
2.1 新的驱动方式的研究
四种驱动方式都存在一定的缺点,近年来,世界各国的研究者也在致力于解决相关问题。目前,新的驱动方式已经出现,如使用柔性驱动器的外骨骼康复机器人已经进入临床测试[6]。哈佛大学的Octobot是柔性机器人,采用微流控来驱动[7]。
2.2 改进控制策略
对控制策略的探索与改进是研究的热点之一。现有的下肢外骨骼机器人在控制策略上仍有改进的空间,如导纳控制的不稳定性,这需要对阻抗模型进行优化。
2.3 优化机械结构
外骨骼机器人往往尺寸较大,优化机械结构能让其在轻量化上迈进一大步,从而获得更好的性能。具体而言,优化传动方式、改进电池与蓄电设备、尝试新型材料都可以作为优化的角度。
3 结语
本文介绍了下肢外骨骼机器人的四种驱动方式,概述了其优缺点,并探讨了未来下肢外骨骼机器人的发展前景与发展方向。未来的下肢外骨骼机器人将会更加轻便和可靠,控制策略将更加完备,能用于更广泛的领域。
参考文献:
[1]KALITA B,NARAYAN J,DWIVEDY S K . Development of Active Lower Limb Robotic-Based Orthosis and Exoskeleton Devices: A Systematic Review[J]. International Journal of Social Robotics,2020(1).
[2]张增峰,陈炜,李浩,等.外骨骼机器人驱动方式的研究[J].医疗卫生装备,2016(8):126-129.
[3]GUGLIELMINO E,SEMINI C,KOGLER H , et al. Power hydraulics - Switched mode control of hydraulic actuation[C]// 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, October 18-22, 2010, Taipei, Taiwan. IEEE. 2010.
[4]ZOSS A ,KAZEROONI H ,CHU A . On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX)[C]// Intelligent Robots and Systems, 2005. (IROS 2005). 2005 IEEE/RSJ International Conference on. IEEE, 2005.
[5]NATALI C D,SADEGHI A,MONDINI A,et al. Pneumatic Quasi-Passive Actuation for Soft Assistive Lower Limbs Exoskeleton[J].Frontiers in Neurorobotics,2020(14):31.
[6]下肢康复外骨骼机器人BEAR-H1[EB/OL].[2020-12-10].http://milebot.com.cn/exo/.
[7] Mazzolai B,Mattoli V . Robotics: Generation soft[J]. Nature,2016(7617):400-401.
