基于D-S理论多源信息融合的电气设备故障诊断模型
2021-07-16 08:10张洋瑞牛为华
计算机应用与软件 2021年7期
陶 鹏 张洋瑞 李 兵 牛为华
1(国网河北省电力有限公司电力科学研究院 河北 石家庄 050021) 2(华北电力大学计算机系 河北 保定 071003)
0 引 言
电力系统向大容量、超高压和跨区域输电方向发展,对电气设备的安全运行提出了更高的要求。随着国家智能电网建设和泛在物联网的全面实施,对运行中的电气设备广泛开展在线监测和诊断,以实现设备及时而准确的状态评估,及早发现其内部的固有缺陷和隐患,这一工作变得越来越重要。但是,电气设备在线监测信号采集的测量环节易受周围环境强磁场、强电场、设备运行方式及自然环境变化的影响,其监测信号特征具有不精确和多样化等特点,且故障与故障、故障与特征量之间存在较为复杂的联系。电气设备一般情况下动作较少,获取大量的动作状态信息较为困难,故应在一次动作发生时尽可能多地获取各种信息,为故障诊断提供理论依据和技术支持。目前,在电气设备的故障数据选择上,主要选择外部获取信号如振动信号[1-2]、声波信号[3]、局放信号[4],以及序列图像信号[5]等。这些关于电气设备故障诊断方法的研究大部分是采用单一信号源或两种信号源进行故障诊断。在实际应用中,由于信号的信息获取不完备、信息丢失、传输错误以及外界干扰等,往往造成信息特征与诊断结果的不一致,甚至出现矛盾。电气设备的故障征兆与故障之间并非一一对应的简单线性关系,因此要得到更准确的诊断结果,需要多源、多传感器信号特征量的获取及诊断结果的融合,才能对电气设备的故障进行有效的评估和诊断。
D-S证据理论广泛应用于多传感器的故障诊断中,它面临两个问题[6]:(1) 如何将多源信息进行信任量化,得到原始的证据;(2) 如何融合冲突证据,得到合理结果。近年来,关于这两方面的研究日益深入:Yager设识别框架为一个封闭空间,将冲突的证据分配给识别框架,在完全否定冲突证据的基础上合成高度冲突的证据,但随着证据的增多,对其最终结果会有较大影响[7];梁昌勇等[8]把由基本概率分布相同所引起的冲突划为证据的支持信度,将冲突证据进行吸收实现证据的合成,但其适用于非交互、具有“一票否决”和“众口铄金”等特殊背景下的群决策;Tazid等[9]在证据合成时构造了新的合成方法,解决了高冲突证据的合成问题。在证据冲突时,各种改进的合成方法能够在一定程度上降低冲突证据对合成结果的干扰,提高其有效性,但其聚焦性能可能降低。因此,在提高证据融合效果的同时保持其聚焦性能是十分必要的。将D-S证据理论应用于电气设备的故障诊断可以提高诊断的可信度,周阳等[10]运用D-S证据理论融合了两个传感器的诊断结果,并合成了最终评估结果,对D-S理论进行了有效的应用。
本文针对D-S证据理论的不足之处进行改进,提出将证据可信度函数进行修正以解决0信度悖论问题和支持概率作为权重以解决证据的冲突问题。通过算例验证了本文方法进行证据融合的可行性和有效性。在实际应用中,将电气设备动作中产生的振动信号、声波信号及序列图像信号的诊断结果进行决策级的融合,验证了本文方法在解决电气设备故障诊断问题中有良好成效。
1 证据合成悖论及冲突定义分析
1.1 D-S证据理论
设有证据E,s(E)表示对E的信任程度,若存在集函数s:2Ω→[0,1],满足:
(1)

(2)
(3)
1.2 D-S证据合成悖论
按式(3)的规则对证据合成时,冲突系数k值越趋近0,表示证据间的冲突就越小;k值越趋近于1,表示证据间的冲突就越大,此时采用Dempster合成规则进行融合具有高冲突的证据时,往往会出现不符合常识的判断。
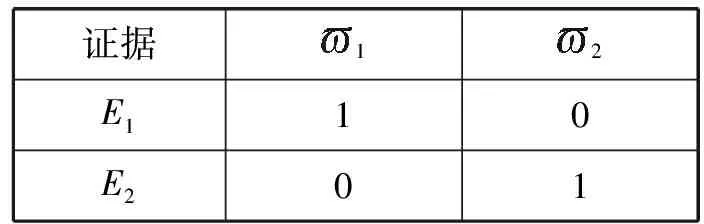
表1 完全冲突悖论
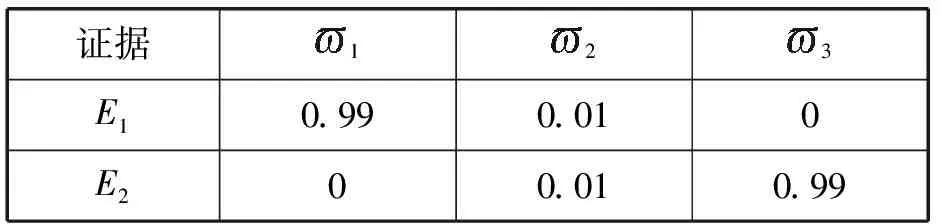
表2 1-信任悖论
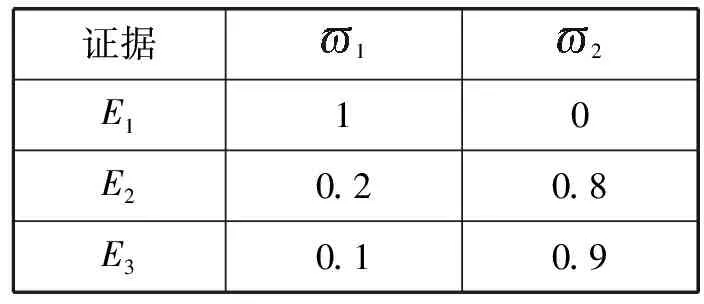
表3 0-信任悖论
综合分析例1、例2和例3,可以看出在应用D-S理论进行证据的融合时,都产生了悖论,其主要原因为D-S合成规则对高冲突证据的不完备。
2 改进的证据合成方法
2.1 冲突证据修正方法
针对D-S证据合成悖论,本文对其改进并修正了高冲突证据的合成问题。
(4)
(5)
式(5)中,对高冲突且同一种命题支持率较低的证据进行了修正,从而减弱高冲突证据对整体判断结果的影响。
对式(5)进行归一化后为:
(6)
2.2 改进的D-S证据合成方法实验对比及分析
为验证本文方法的可行性和有效性,本文选用具有低冲突和高冲突的两组算例进行改进D-S方法的验证,并与D-S证据理论、Yager方法、文献[8]方法和文献[9]方法进行对比。
(1) 设辨识框架Ω={A,B,C},E1、E2、E3、E4是该辨识框架上的4组低冲突,如表4所示,采用不同方法的融合结果如表5所示。
尽管国外如此重视无障碍网络教育,但是仍然存在一些问题。比如:设计和开发时没有完全符合无障碍标准, 一些障碍学习者使用时仍存在障碍。
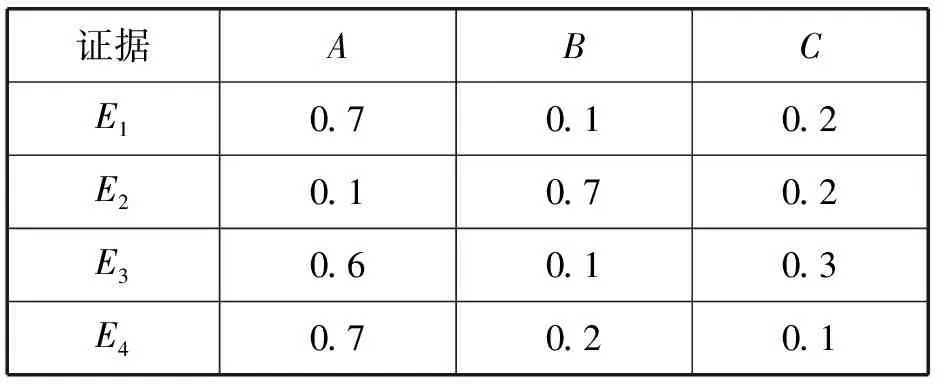
表4 4组低冲突证据概率信度分配
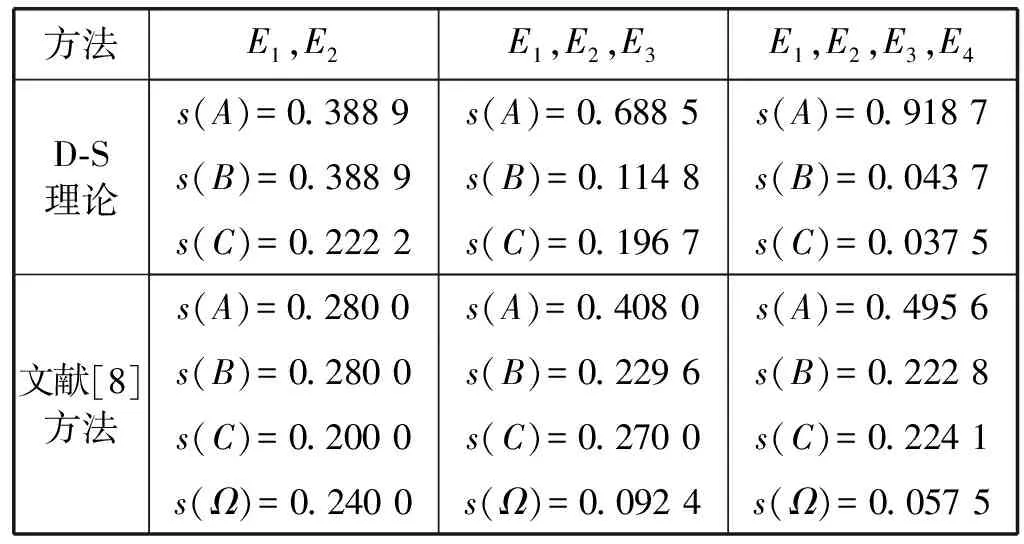
表5 低冲突证据不同方法融合结果
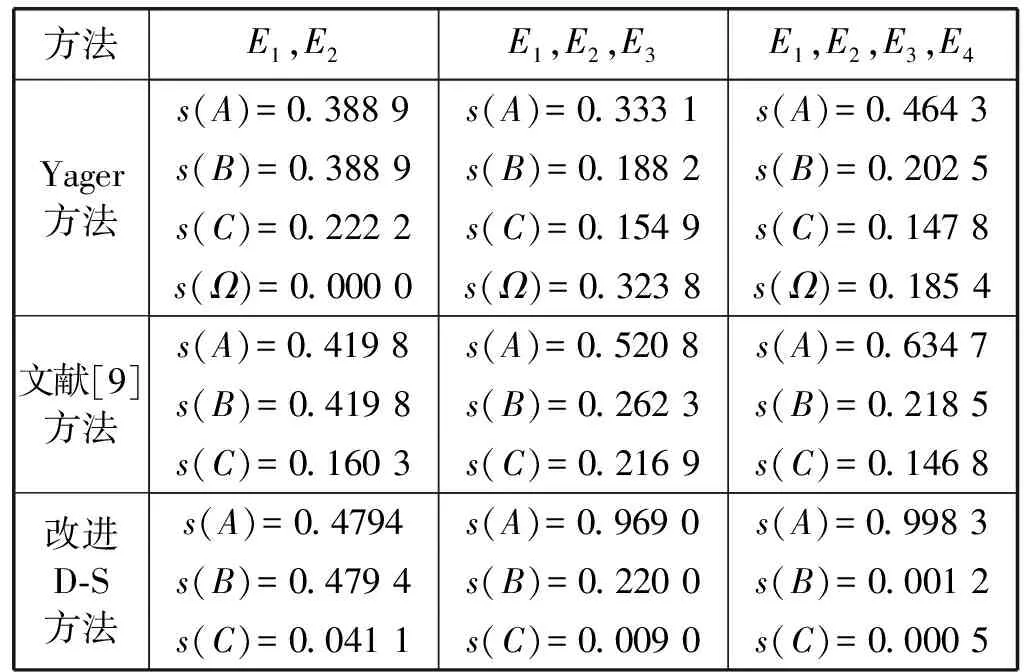
续表5
由表5可以看出,当E1和E2两组冲突证据进行合成时,几种方法均不能给出某种情形占优的合成结果;当加入低冲突的证据E3时,改进D-S方法的聚焦性能比D-S证据理论提高40.7%,比文献[8]方法提高137.5%,比Yager方法提高近两倍,比文献[9]方法提高86.1%;当加入低冲突证据E4时,改进D-S方法的聚焦性能比D-S证据理论提高8.7%,比文献[8]方法提高101.4%,比Yager方法提高115.0%,比文献[9]方法提高57.3%。对4组低冲突证据的合成结果比较如图1所示。
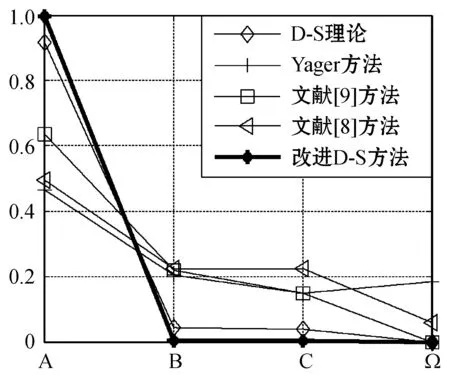
图1 低冲突证据的合成结果比较
由图1可以看出,在证据冲突较低的情况下,各种方法均将证据的合成结果聚焦到焦元A,但相对于文献[9]方法、Yager方法和文献[8]方法来说,改进D-S方法的聚焦性能有明显的提升,可以得出正确的合成结果。
(2) 设辨识框架Ω={A,B,C,D,E},E1、E2、E3、E4是该辨识框架上的4组高冲突证据,如表6所示,采用不同方法的融合结果如表7所示。
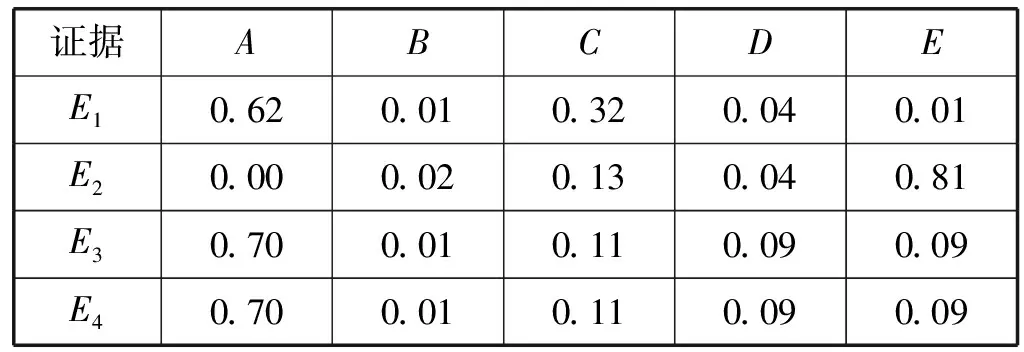
表6 4组高冲突证据概率信任分配
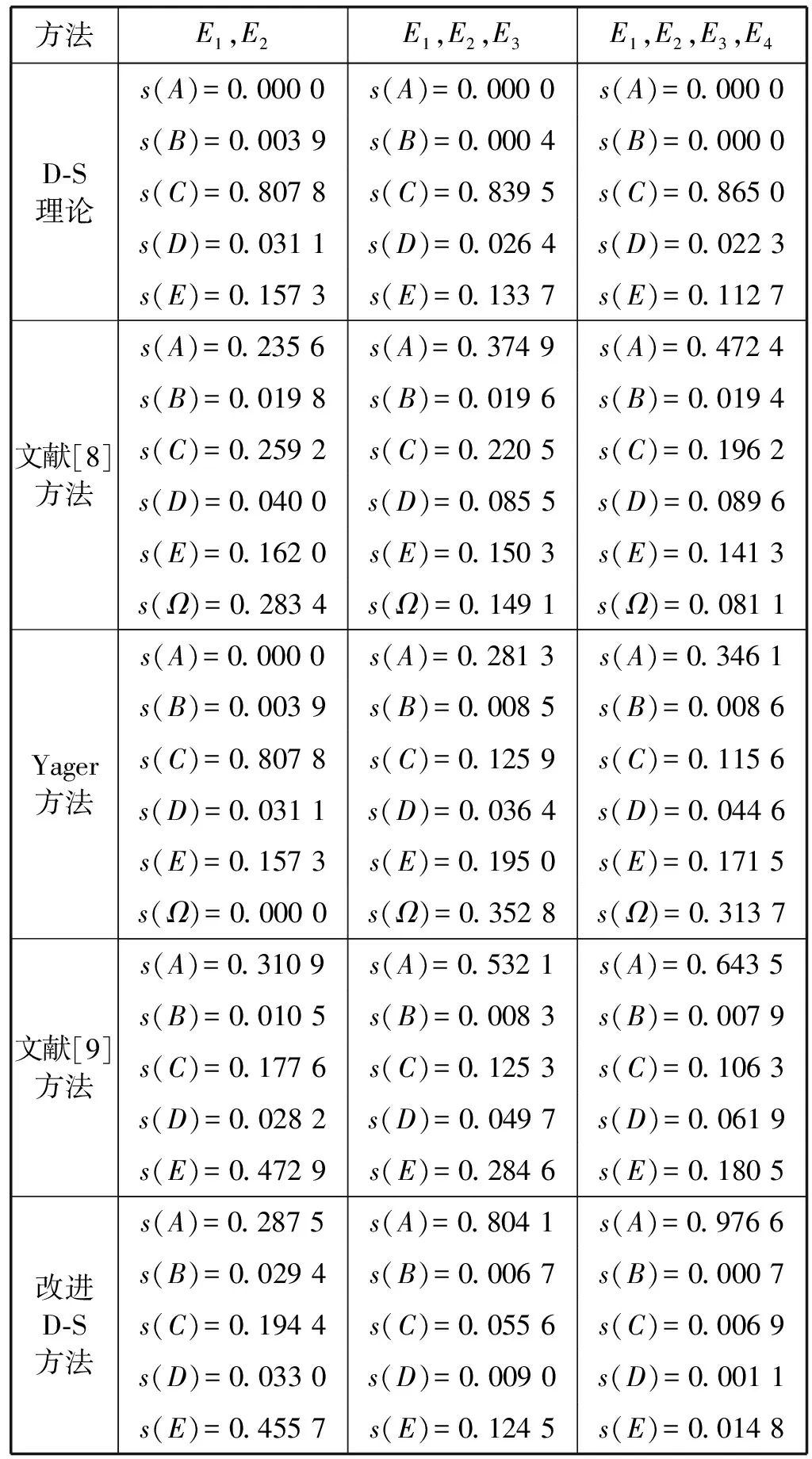
表7 高冲突证据不同方法融合结果
由表7可以看出,当E1和E2两组冲突证据进行合成时,由于有0信度证据出现使得D-S证据理论方法和Yager方法合成证据出现异常,而另外几种方法由于合成原理不同使得合成结果差异很大。当加入第3组证据E3时,D-S理论方法依然产生悖论结果,本文改进D-S方法的聚焦性能比文献[8]方法提高114.5%,比文献[9]方法提高51.1%,Yager方法由于将最大的聚焦情形分给未知情形而不能给出一个明确合成结果。当加入第4组证据E4时,D-S理论方法依然产生悖论结果,本文改进D-S方法的聚焦性能比文献[8]方法提高106.7%,比Yager方法提高将近两倍,比文献[9]方法提高51.8%。可以看出,随着新证据的加入,本文方法在结果的聚焦上呈现了较好的性能。对4组高冲突证据的合成结果比较如图2所示。
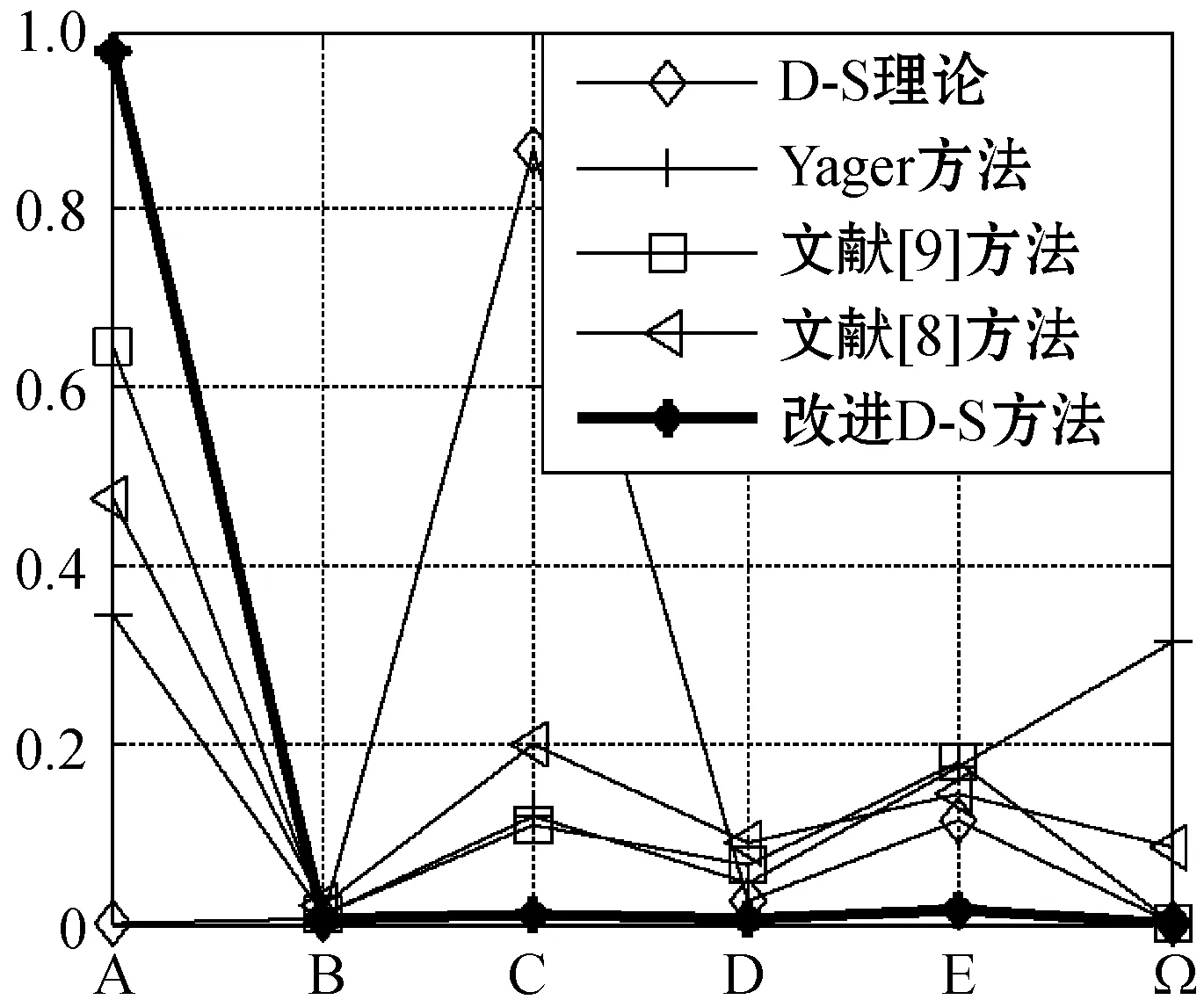
图2 高冲突证据的合成结果比较
由图2可以看出,在证据冲突较高的情况下,由于0信度的出现导致D-S证据理论方法出现了证据合成异常。Yager方法将冲突证据的不确定性分配给全局和焦元A的支持度相近,使得决策结果的未知程度加大,不利于诊断结果的确定。文献[9]方法也取得了较好的聚焦效果,但聚焦性能略低。除了D-S证据理论方法外的几种方法均能给出符合实际情况的证据合成结果,但是相对于Yager方法、文献[9]方法和文献[8]方法来说,本文改进D-S方法的聚焦性能有明显的改进。
综合图1的低冲突证据和图2的高冲突证据合成情况来看,本文改进D-S方法与对比方法相比有更理想的合成效果,这就充分表明本文方法能够适应任意情形下的证据合成,并取得良好聚焦结果。
3 多源信息融合的电气设备故障诊断模型
电气设备工作时,会产生相应的外部信号,若评估其状态,需要获取其多种外部信号进行故障诊断时,如振动信号、声波信号、局放信号及序列图像信号等多种信号,在此基础上构建多源信息融合的电气设备故障诊断模型,对多种信号的诊断结果进行合成获取最终结果,其诊断过程如图3所示。
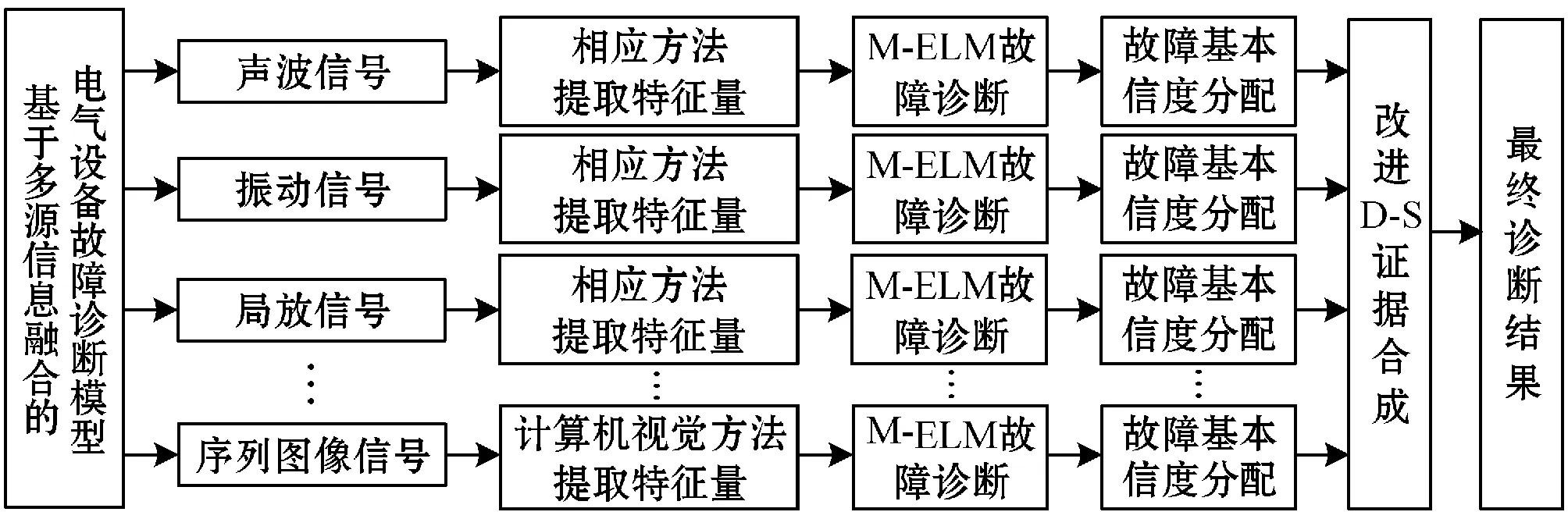
图3 多源信息融合的电气设备故障诊断模型
为了验证基于多源信息融合的电气设备故障诊断模型的有效性,本文以ZN65-12断路器和LW59-252断路器两种电气设备为例进行说明。
3.1 多源信息融合的断路器故障诊断信息准备
本文利用dB3小波对断路器工作时的3路振动信号和2路声波信号分别进行5尺度小波分解、滤波、重构[14],然后计算小波包能量熵作为信号的特征量。同时利用视频跟踪算法以非接触方式获取断路器动作情况的序列图像信号,从而计算相关特征参量,根据序列图像信号可以计算位移信号的各特征量。
表8给出了ZN65-12断路器和LW59-252断路器操动机构动作时所获取的来自3种信号源特征向量各1组。表8中的信号特征量包括两个声波信号的小波包能量熵、三个振动信号的小波包能量熵和序列图像获取的特征量(分别为动作时间/ms、触头开距/mm、观测行程/mm、过冲量/mm、超行程/mm、合闸速度/(m·s-1))[15]。
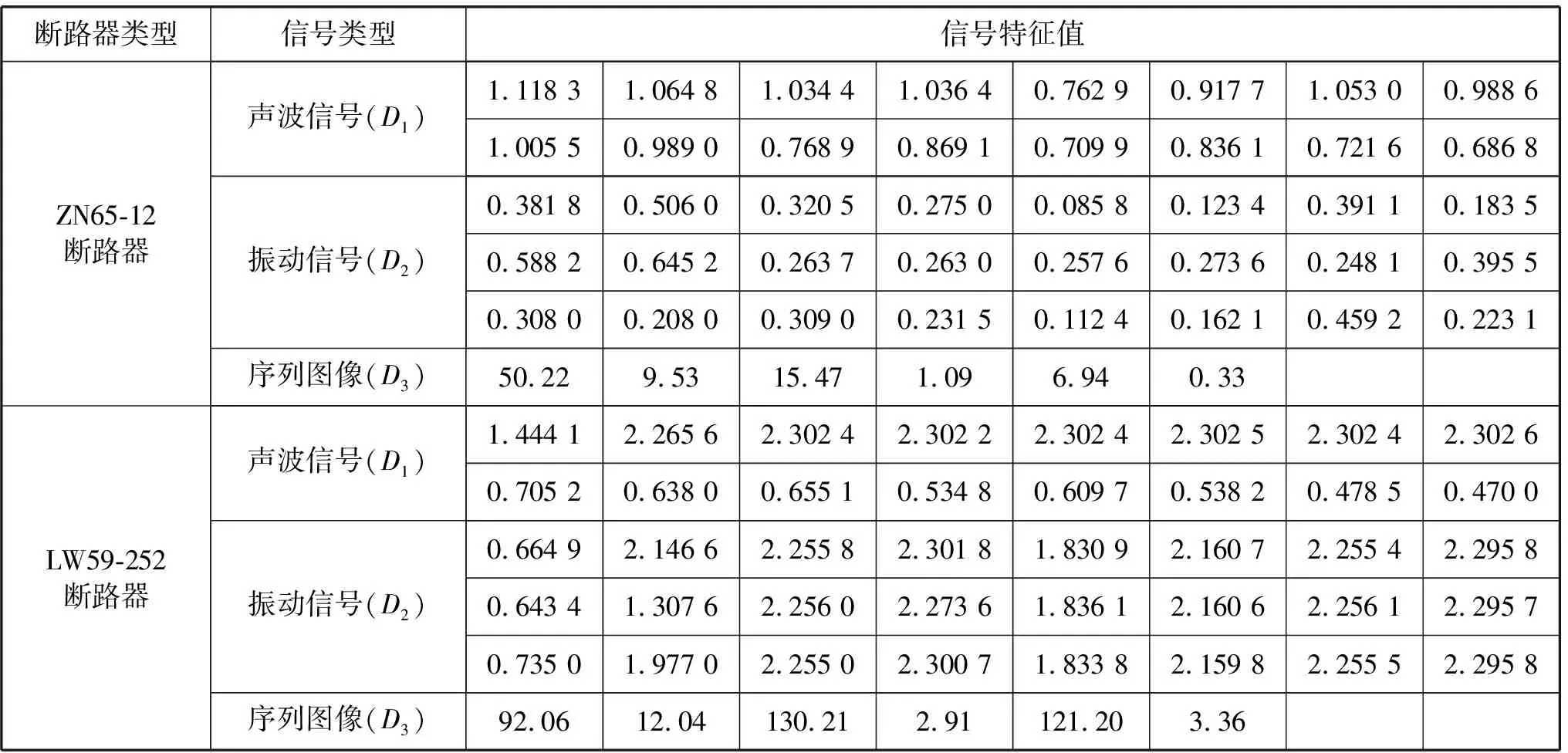
表8 两种断路器机构运动时的特征向量
3.2 基于多源信息的M-ELM和改进D-S断路器故障诊断
分别提取并计算断路器动作时的声波信号D1、振动信号D2和序列图像D3特征量,并将其作为M-ELM的输入,应用M-ELM模型构建方法针对三种信号分别进行断路器故障诊断模型的训练,并将训练好的模型应用于新测数据的故障诊断。
(7)
对式(7)中的信任分配进行归一化,有:
(8)
设断路器状态的辨识框架为Ω={A,B,C},该辨识框架中A表示正常状态、B表示基座松动状态、C表示机构卡涩状态,证据E1、E2、E3分别为ZN65-12断路器和LW59-252断路器动作时所获取的声波信号、振动信号和序列图像信号经M-ELM模型故障诊断后对识别框架内各种状态的基本可信度(已完成可信度的归一化),对于表8中的特征量可计算出如表9所示的各种信号源的诊断结果。
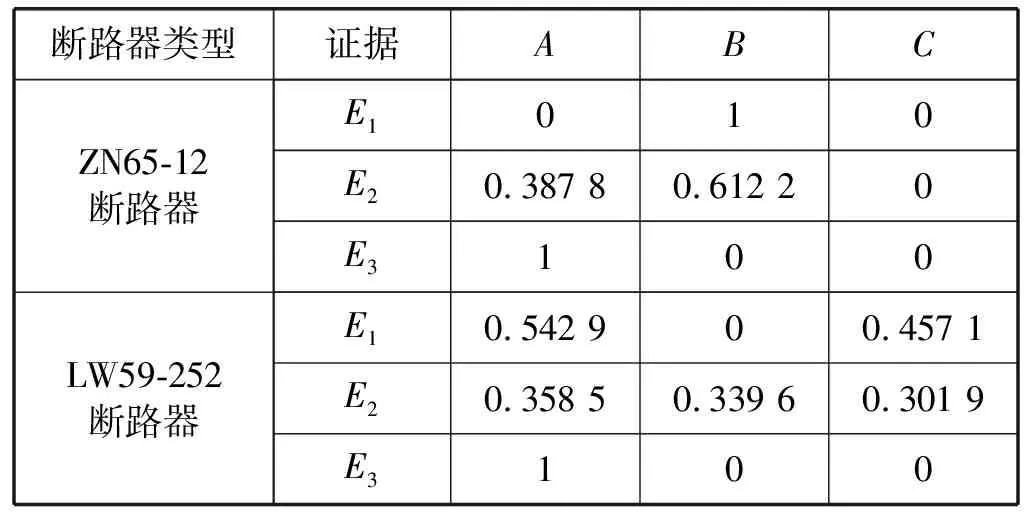
表9 断路器故障诊断结果
表9中应用M-ELM模型并应用式(7)和式(8)进行加权重构的诊断结果可以看出,对于ZN65-12断路器,采用声波信号认为诊断结果应为基座松动;振动信号诊断的结果认为38.78%为正常,61.22%为基座松动;序列图像获取相关特征的诊断结果认为正常。对于LW59-252断路器,采用声波信号诊断结果54.29%认为正常,45.71%认为机构卡涩;振动信号诊断的结果35.85%为正常,33.96%为基座松动,30.19%认为机构卡涩;序列图像获取相关特征的诊断结果认为正常。这时,三个证据支持断路器的状态并不一致,而且存在的0支持率,不能应用D-S理论进行证据的合成。对表9应用式(4)、式(7)和式(8)进行信度的调整后应用D-S方法对其进行证据的合成,得到最终的诊断结果。采用D-S证据理论、文献[8]方法、Yager方法、文献[9]方法和本文改进的D-S方法的融合结果,如表10所示。
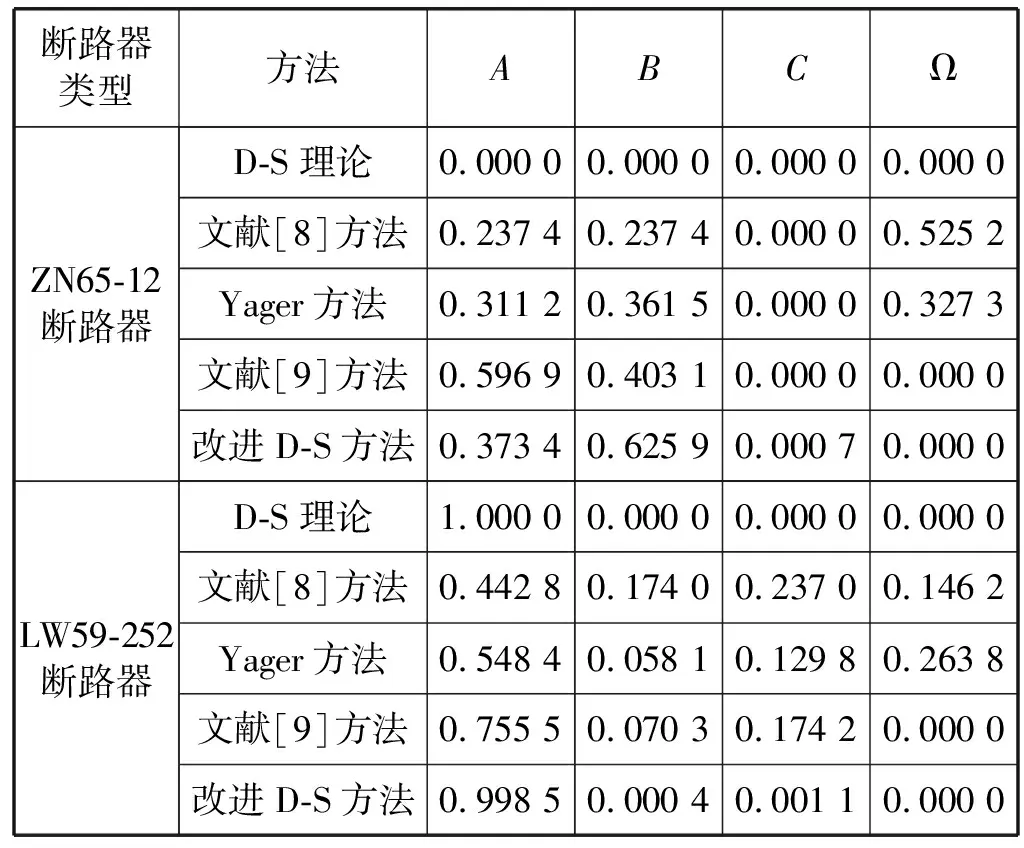
表10 多种方法融合结果比较
由表10可以看出,对于ZN65-12断路器,D-S理论已经完全失去作用不能给出任何判断;文献[8]方法和Yager方法将断路器的状态判为未知不能给出有效判断;文献[9]方法支持断路器处于A正常状态,与断路器实际情况矛盾;经过改进D-S方法进行证据的合成后认为诊断结果为B基座松动故障,与实际故障类型相同,降低了依赖单一序列图像信息对断路器状态的误判率,表明了改进D-S方法的可行性。对于LW59-252断路器,几种方法都较支持断路器处于A正常状态,由于证据的一致性较好,D-S此时给出了绝对支持的判断,本文改进D-S方法对A正常状态的支持度为99.85%,相比其他几种方法的支持度要高得多,表明了改进D-S方法在证据一致情形下合成结果的有效性,从而可进一步提高测试样本诊断结果的正确率。
将改进的D-S方法应用于序列图像信号、声波信号及振动信号进行多源信息融合的故障诊断,并将M-ELM应用于单一信号故障诊断。30组测试数据的测试结果,如表11所示。
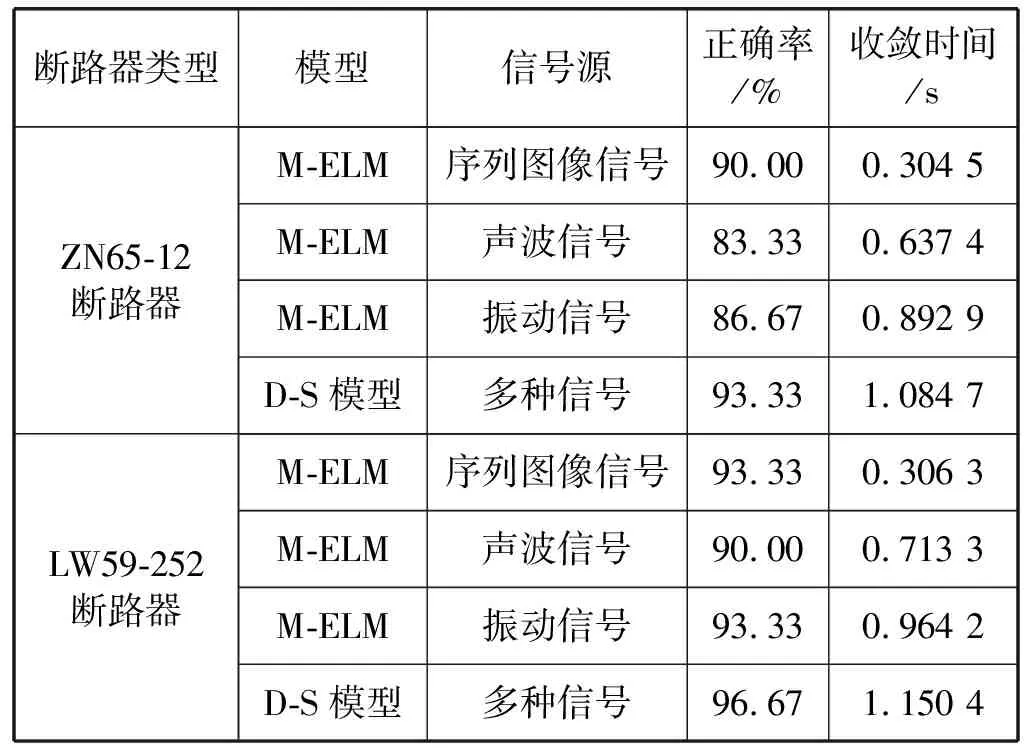
表11 对比分类结果分析
由表11可以看出,应用多种信号融合模型对ZN65-12和LW59-252断路器进行断路器的故障诊断时,诊断正确率相比于单一信号(序列图像信号、声波信号或振动信号)都有所提升,说明多信号融合能有效提升电气设备的诊断正确率。同时,由于信号源较多,而且增加了D-S证据融合诊断结果过程,本文模型的时间消耗略多。
本文提出的基于多源信息融合的电气设备故障诊断方法,在融合过程中利用声波信号、振动信号、序列图像信号等多种信号源作为电气设备故障特征提取的来源,各种信号均采用非接触的测量方法,不受本文示例中的断路器型号及故障类型影响,也不受电气设备种类的影响。因此,若要实现对其他电气设备的故障诊断,只要利用相应传感器获取声波信号、振动信号、序列图像,以及其他信号源的信号等,就能获取相关特性参数,实现多源信息融合的电气设备故障诊断,并获取较高诊断正确率。
4 结 语
为了实现电气设备相关故障的诊断,本文提出了基于多源信息融合的电气设备故障诊断方法,在研究了经典D-S证据理论的不足与现有改进方法后,提出了一种新的证据合成方法。该方法首先对冲突证据进行预处理,再使用经典的D-S证据理论方法进行证据融合,通过实例验证了本文方法的聚焦性能。实用化中,利用电气设备工作中的声波信号、振动信号以及序列图像信号等,构建了多源信息融合的电气设备故障诊断模型,并以两种类型的断路器诊断为例验证了模型的有效性,通过实验分析与比较,本文模型能够得出更准确的故障诊断结果。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年9期)2022-05-20
数字技术与应用(2021年6期)2021-07-28
建材发展导向(2021年12期)2021-07-22
科技研究·理论版(2021年20期)2021-04-20
建材发展导向(2021年23期)2021-03-08
电子乐园·下旬刊(2021年3期)2021-02-08
科技创新导报(2017年17期)2017-08-23
科学与财富(2017年19期)2017-07-19