智能立体充电车库设计分析
2021-07-15 01:46:24吴龙飞
机械研究与应用 2021年3期
吴龙飞,张 旭,刘 静
(江西理工大学 机电工程学院, 江西 赣州 341000)
0 引 言
随着中国近年来的经济蓬勃发展和科技的显著进步,人民大众的生活水平也不断地上升,许许多多的人都拥有了汽车。其中新能源汽车的数量也越来越多,但是相应的停车和充电设施却无法满足人们的需求。从而导致了城市“停车难”的问题日益突出,乱停车、占道停车现象屡屡出现,给民众的出行带来诸多不便[1]。根据国外的发展经验,城市化进程和新能源汽车的普及都是一个漫长且较为平稳的过程,但在我国,这两者的发展是一个相对较为快速甚至是跳跃式的发展过程,而且两者也相互交融。在节能减排发展过程中,过于偏重研发生产新能源汽车的问题、而轻视了停车和充电的问题,导致了城市停车充电难的问题不断加剧,造成停车位严重不足,带来了城市道路交通压力不断增大、生态环境不断恶化等问题[2]。且随着我国经济发展和城市化进程的推进,我国新能源汽车的数量将持续上升,“停车难”等问题将更加突出。因此,智能充电车库将会是解决新能源汽车“停车难”、“充电难”等问题的有力方法之一,为城市静态交通基础设施建设提供一个有益的选择。
1 智能充电立体车库
1.1 智能充电停车库的特点
目前,智能充电立体车库可以分为四大类型,分别是升降横移式、垂直循环式、巷道堆垛式、垂直升降式。其中升降横移式立体车库除升降动作外,通过横移动作让开出车通道。由于土建工程较少,也无地下机构,是目前使用最广泛的立体车库形式[3]。
智能立体停车库主要适用于电动汽车的停放,车辆的存取全过程智能化,用户不进入车库内,便于管理、节能减排、安全隐患少。其特点:①车库主体外形为立方体,且可根据用户的要求合理的布置层数和列数,以满足用户停车数量和取车时间需求;②车辆的存取全过程智能化,用户不进入车库内,便于管理、节能减排、安全隐患少;③机械结构中采用模块化设计,便于组合使用,易于安装拆卸,缩短施工周期;④智能充电立体车库内部设置有充电桩,可为新能源汽车停放时提供充电服务;⑤安全保护方面采用声光引导及定位装置、自动消防灭火系统,设有防坠落、防碰撞、防过载等一系列安全保护装置;⑥占地面积小,可充分利用地下空间,节约了大量土地资源,减少了对周边环境的破坏。
1.2 智能充电车库的工作流程
智能停车库的基本功能应当满足用户汽车的存取停放需求。汽车的存取停放操作:用户停放车辆-车库识别车辆-系统数据统计编号-夹取固定车辆-运动传送入库-停放车辆-车辆充电。存取车过程分别如图1所示,整个过程应尽量实现全自动化,降低人工操作步骤,并能够确定保证存取车的稳定性、准确性、快速性[4]。
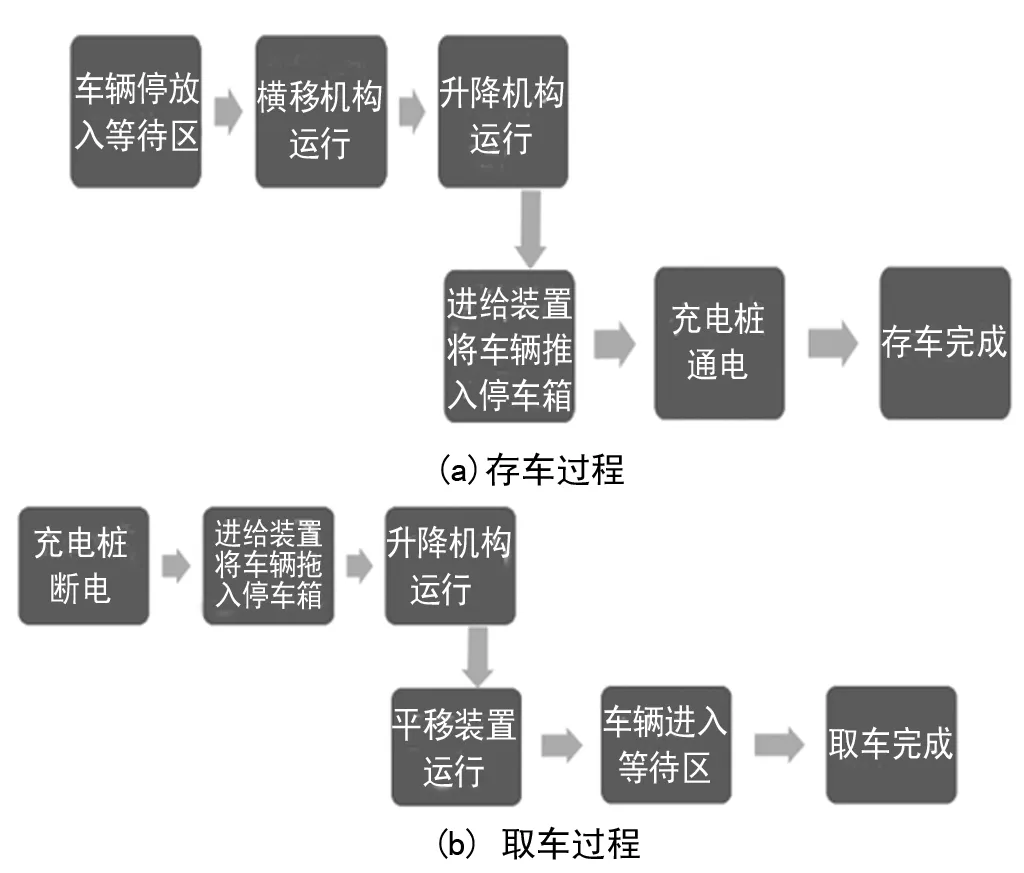
图1 存取车过程
1.3 立体车库技术的推广意义
传统的地面停车位只能停放1层,一般每个停车位大约需要12 m2左右,占地面积大、停车数量少。而传统的地上或圆形停车设备的有效停车使用面积约占建筑面积比40%,停放30辆车共需要360 m2,计算下来每个停车位需要占用12 m2左右的建筑面积。[5]
智能充电车库每个停车位只需要12 m2,一层放4辆,一共3层,共12 辆车,按地面停车占用土地面积换算为144 m2,实际车库占地48 m2。由此可以看出:智能充电车库能充分利用地下空间,占用地表面积小;车库布置灵活、对场地的适应性强;停车存取自动化程度高、符合今后的发展方向;用户不入车库、便于管理、安全隐患小。可广泛用于老旧城区的改造,新建小区的边角空闲地带,商场,公路和立交桥的周边地带;它既可独立设置单个立方停车库,也可以将多个单体停车库通过组合或集群的方式,建造成为满足实际场地所需要的新能源汽车智能车库[6]。
2 停车装置简介
2.1 停车装置的机构描述
停车装置作为智能车库的核心组件之一,它主要包括平移装置、升降装置、存取车平台和进给装置等部件。如图2所示,停车装置为二自由度机械装置结构,其中平移装置和升降装置分别实现汽车平台所需要的平移运动和升降运动。
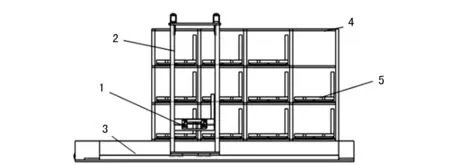
图2 停车装置三维模型1.存车平台 2.升降装置 3.平移装置 4.停车架 5.载车板
平移装置放置于地面,由地面支撑。平移装置上的运动板块支撑升降装置,升降装置则保持存取车平台的支撑,因此可以在机械原理上继续简化为机械结构简图,如图3所示,平移装置简化为滑块1和杆1,杆1接地,升降装置简化为滑块2和杆2,其中杆2与滑块1固定,存取平台为滑块2。
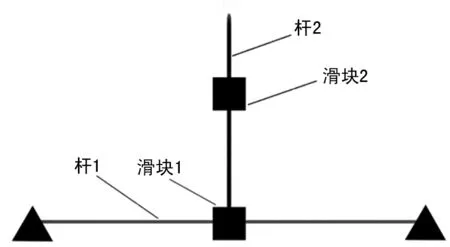
图3 停车装置结构简图
停车装置在进行存取车时,其工作状态可同时分为两个工作状态,状态1:滑块1在杆1上进行横向往复运动;状态2:滑块2在杆2上进行纵向往复运动。在电机的驱动下,两种状态同步协调运动。
2.2 停车装置虚拟样机模型建立
综合利用NX-UG进行运动仿真分析,借助虚拟样机来模拟仿真新能源汽车智能车库的停车装置运动过程。首先对建立的停车装置模型进行简化处理,略去无关零件,略去平行杆件,略去辅助支撑件,略去存取车平台,只保留主要支撑停车装置的部件,简化后共有5个零件,并且模型简化前后的质量分布和质心位置基本相同,然后对停车装置的简化模型进行约束,得简化后的停车装置如图4所示。
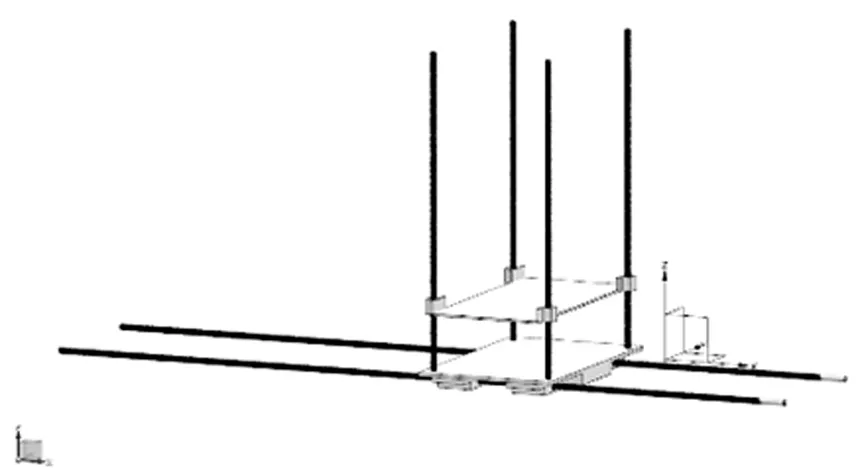
图4 停车装置简化模型
2.3 停车装置的动力学仿真
在NX-UG建模简化处理后,进入UG仿真界面,新建仿真,选择动力学仿真,点击确定,重新进行连杆的建立,将底部两杆设定为一个连杆L001,并且固定连杆,将平移装置连同四个纵向滚珠丝杆设定为连杆L002,不固定,最后将升降装置连同存取车平台设定为连杆L003,不固定。如图5所示。
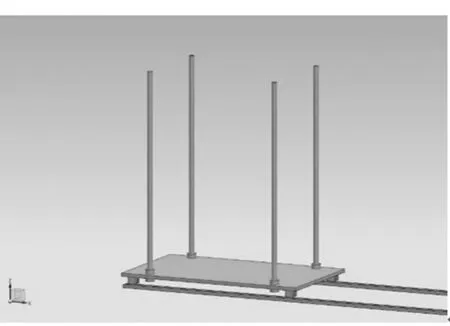
图5 智能立体停车库仿真
进行运动副的建立,选择平移装置的连杆L002,选择滑动副并指定原点,指定矢量为x轴正方向,建立滑动副为J002,摩擦选择动摩擦系数为0.1,静摩擦过渡速度为0.1 mm/sec,最大静摩擦变形为0.01 mm,选择驱动,选择恒定平移,初始位移0 mm,初速度输入12.5 mm/s,加速度为0,完成平移装置的运动副建立。然后建立升降装置的运动副,方式与平移装置一样,选定连杆、原点和矢量方向,滑动副J003,摩擦选择动摩擦系数为0.1,静摩擦过渡速度为0.1 mm/s,最大静摩擦变形为0.01 mm,选择驱动,选择恒定平移,初始位移0 mm,初速度输入12.5 mm/s,加速度为0,确定滑动副的建立。完成后点击解算方案,选择常规驱动,分析类型为运动学,时间选择30 s,步数1000步,包含静态分析,重力常数为9806.65 mm/s2,方向指向z轴负方向。名称为Solution_1,点击确定。运算求解结果如图6所示。
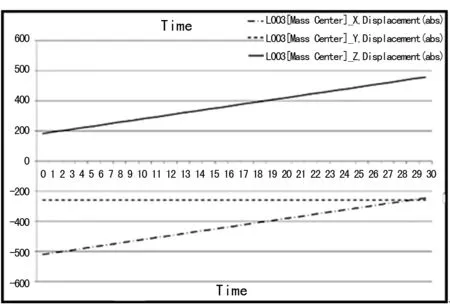
图6 升降装置运动轨迹图
3 载车板有限元分析
综合利用UG进行有限元分析,首先对载车板的实际受力状态进行分析,分析受力原理,建立出载车板受力模型。通过采用NX10.0软件建立虚拟样机模型来简化载车板,并对其工作过程进行受力模拟分析,从而得到载车板的受力求解结果。对比结果,受力状态与实际载车板受力情况符合。求解结果如图7所示。
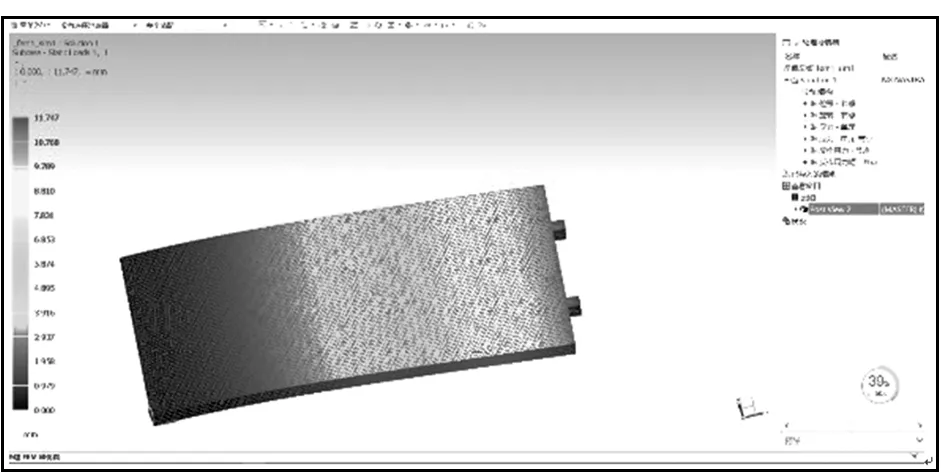
图7 载车板有限元分析
4 结 语
在节能减排发展过程中,过于偏重研发生产新能源汽车导致了城市停车充电难的问题不断加剧,带来了城市道路交通压力不断增大、生态环境不断恶化等问题。笔者对自动存取车辆并智能控制充电的立体车库设计方案进行了分析,通过对车库结构的三维构建,对立体车库的停车装置进行运动仿真,分析了升降装置的轨迹运动情况,对车库的主要部件进行有限元分析且其满足设计强度要求,验证了立体车库可以满足应有的使用性能要求,在理论上为实现智能立体充电车库的结构设计提供了可靠的基础。
猜你喜欢
小猕猴智力画刊(2023年4期)2023-04-23 08:50:02
智能建筑电气技术(2022年2期)2022-02-06 02:33:00
电子制作(2019年23期)2019-02-23 13:21:18
电子制作(2017年2期)2017-05-17 03:54:53
海外星云(2016年7期)2016-12-01 04:18:08
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
创业家(2015年6期)2015-02-27 07:53:36
汽车零部件(2014年10期)2014-11-11 12:25:06
自动化博览(2014年6期)2014-02-28 22:32:04
电子设计工程(2014年12期)2014-02-27 11:58:11