
露天矿车载监控终端技术的应用研究
2021-07-13 02:53:22张天峰神华和利时信息技术有限公司北京100011
中国矿山工程 2021年3期
张天峰(神华和利时信息技术有限公司,北京100011)
1 前言
露天矿的开采作业中,由于道路弯道多、作业空间有限、司机工作强度较大等原因,运输事故数量占到总事故起数的70% 以上。在视野不开阔或者拐弯的区域,司机无法及时发现对向行驶车辆,情况严重时将会导致安全事故的发生。但由于面向露天矿的安全装备产品研发处于起步阶段,目前国内尚无完整的解决方案从根本上解决此问题[1]。
伴随着“智能化矿山”建设进程的加速,信息技术在矿山的作业过程中起到了巨大的推动作用。本文通过对车载监控终端C-V2X 技术的研究,从语音技术、短距离无线通信GPS 定位、可视技术等不同方面改善驾驶员的视野并进行提示,从而实现车辆防撞的目的,保证露天矿运输安全,为露天煤矿企业的安全发展夯实了基础。
2 运输监控系统的现状
对露天煤矿运输系统的监测主要是对矿山运输车辆进行监测,其监测一方面保障运输过程的安全[2];另一方面,可以减少非正常的燃料的消耗,并提供调查信息和支持,帮助管理者做出决策,同时为煤矿运输系统的工作人员提供实时信息[3]。
2.1 系统组成
露天矿车载监控系统分为7 个部分:车载信息终端、基本车况监控系统、燃油监控系统、及时通讯系统、轮胎监控子系统、管理平台以及数据挖掘系统。车载信息终端分为车载信息终端A 与车载信息终端B,其中管理平台需要通过通讯系统的才可以成功将车载信息数据传输至车载信息终端A,车载信息A 负责基本车况监控、轮胎监控以及燃油这3 个监控系统的数据收录、分析与处理;然后,再经由车载信息终端A 处理之后又过渡至信息终端B[4],具体如图1所示。
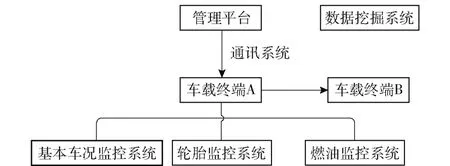
图1 露天矿车载监控系统构架图
2.2 国内外研究进展
国外露天矿车载监控系统发展比较早,其中美国的模块公司、加拿大的Wenco 公司的卡车调度系统知名度最高。美国模块公司将其开发的卡车调度系统运用到了全球大约130 多个矿。20世纪末,美国模块公司所研发出来的井工矿坑道调度系统在南美和智利取得了十分良好的应用效果,除此之外,美国模块公司研发出的铁路调度系统,也成功地运用于巴西铁路运营系统。加拿大Wenco 公司研发出的卡车调度系统,其业务范围覆盖面广,并成功装备了许多个大型矿山。
进入21世纪,国外以卡特公司的“ MineStar”系统和小松公司的“AHS” 系统为代表的卡车无人驾驶技术进展加快,并在巴西淡水河谷公司、 澳大利亚所罗门铁矿等矿山进行了无人驾驶卡车的试验和应用[5]。
现如今,国内露天煤矿原煤运输系统采取的是单斗—卡车—带式输送机半连续工艺。现阶段而言,国内现存的车辆防护策略可分为2 种: 一是运用雷达和视频技术手段,能够有效帮助司机了解路况,但是作用范围小。但是其弊端也较为明显,易受到光、灰尘干扰。二是通过构建基站组网并在采区地带设立无线基站,在采煤车辆安置信息数据终端,使终端将信息传至基站,由基站对车辆的区域位置予以合理计算,最终把反送至信息数据终端。该措施成本低,但基站运算量大、安装位置的相关标准极高。
2.3 监控系统存在的问题
目前,露天矿车载监控系统已发展较为完善,其中重要的车载防碰撞预警终端,通过北斗/GPS 卫星定位,实时监测车辆行驶位置、车速,同时通过Zigbee 或RF433 射频自组网通讯技术,实现车辆之间的信息交互和安全预警。数据传递至终端后,及时获取周边近距离车辆的位置、速度等信息,判断是否存在碰撞的危险同时发出语音报警提醒驾驶员提高警惕或减速停车。但目前所采用的车—车通讯技术也存在不足,具体如下:
(1)不同厂商产品采用的Zigbee 或RF433 为私有通讯协议,不同厂商产品通信困难。
(2)Zigbee 或RF433 是定位于低传输速率的应用,传输带宽分别是250 kbps 和100 kbps,V2X 的带宽是上行500 Mbps,下行1 Gbps。
(3)Zigbee 或RF433 更多应用于车车通信,不具备车与路(V2R)、车与人(V2P)、车与基础设施(V2I)、车与网络(V2N)等之间的通信。
(4)Zigbee 或RF433 业务局限性较明显,不适应智能网联车或自动驾驶的业务扩充。
3 车载终端C-V2X 技术
C-V2X 技术,中文解释为蜂窝车用无线通信技术(Cellular Vehicle to Everything)是智能网联汽车实现高效率、高可靠无人驾驶的关键支撑技术,利用车载单元和路侧单元的多种传感设备,实现网联汽车与周围车辆、路侧设备等的相互连接,帮助网联车辆全面掌握交通状况。
车载监控终端C-V2X 技术是基于现有车载终端系统基础上进行功能升级,除具有传统的定位、测试功能以外,还可以通过摄像机采购定时采集驾驶员头部图像,通过AI 分析判断驾驶员行为,对露天矿外委车辆的安全防撞距离进行预警。
3.1 系统架构
车载监控终端主要由供电模块、通信模块、定位模块、C-V2X 模组、存储及语音模、陀螺仪、主板,车车防碰撞预警及驾驶员行为分析计算、嵌入式系统软件组成,具体组成如图2所示。

图2 车载监控终端系统结构图
其中,供电模块、通信模块是终端的基础硬件,实现设备供电,数据传输;定位模块主要是北斗/GPS 高精度定位模块,陀螺仪获取车辆姿态信息;C-V2X 模组主要是5G-V2X 通行模块,RF 通讯主要是与现有RF 通信终端之间的通信;主板具备处理器、内存、O/I 接口,以及承载以上相关模块芯片。
车载系统的防碰撞预警主要是通过GNSS 定位,RF 射频与C-V2X 车辆网多种技术实现超速报警、防碰撞预警等关键功能。驾驶员行为分析主要是通过摄像机采购定时采集驾驶员头部图像,通过AI 分析判断驾驶员行为。
嵌入式系统软件采用车与车通信协议标准,实现超速报警、停车报警、支持进、出区域报警、防碰撞预警、报警信息播报、设备状态自检等功能。
3.2 关键技术
1)基于车辆轨迹的道路网更新技术
露天矿随着生产进度的推进,坑下的道路也在不断的变化,车辆轨迹数据包含了丰富的道路信息,如车流量、车道、转向等,直接反映了道路网络的动态变化。根据道路变化类型,确定不同更新策略,主要包括增加、删除、延长、合并等操作。
对旧道路数据按照道路交叉点分割成路段,在轨迹数据中分析轨迹的变化特征,如方向、转角等,根据轨迹线与旧道路段的关系确定变化类型,根据变化类型,提取道路变化增量信息,及时更新道路数据,实现所有车辆在矿区内的实时位置可以准确定位。
2)基于卫星信号的高精度定位技术
车辆防碰撞预警设备采用亚米级高精度的定位技术,通过读取GNSS 卫星位置与时间差信息,并计算车辆时速,对于车速超出限定值的情况,发出超速报警,同时数据上传调度中心。
利用GNSS 卫星定位设备获取车辆位置信息,通过射频自组网通讯方式,向车辆四周进行广播车辆当前位置信息,同时接收其他车辆发送的车辆位置信息。通过解析计算,计算与其他车辆的距离和相对位置。距离过近时(30、50、100 m 以内)发出不同的报警信号。
系统采用北斗和GPS 双频模式,结合差分信号可实现水平定位精度<1 m,垂直定位精度<5 m,覆盖范围可达到20 ~40 km。
利用差分信号基站的连续观测数据进行组网,通过4G/5G 网络等通信手段发布GNSS 差分信号(差分精度为亚米级),为用户和车辆定位提供数据采集和导航定位服务。
3)V2X 车联网技术
V2X 即车与车(V2V)、车与行人(V2P)、车与基础设施(V2I)、车与网络(V2N)等之间的通信系统,用于提高道路安全性、提升交通出行效率,让交通更安全、高效、智慧。
2018 年12 月27 日,工信部发布顶层设计指导性文件,2020 年实现LTE-V2X 产业化与商用部署,实现LTE-V2X 在部分高速公路和城市主要道路的覆盖,开展5G-V2X 示范应用,构建车路协同环境,提升车用高精度时 空服务的规模化应用水平。目前,由政府主导的C-V2X 工作组已组织开展LTE V2X 和5G V2X 的技术研究、试验验证和产业应用推广等工作。
基于LTE-V2X 等技术实现低时延、高可靠的安全预警、交通效率类提升和部分自动驾驶业务,通过提供增强的行车环境感知能力,V2X 通信可避免大多数碰撞事故。
4)基于AI 视觉深度学习的视频分析技术
充分利用AI 视觉深度学习技术,实现驾驶员行为分析和辅助驾驶。
驾驶员行为分析通过利用AI 视觉深度学习和分析手段,对驾驶员是否疲劳驾驶,是否系安全带,是否使用手持电话,遮挡摄像头违规行为识别报警。有违规行为时上传报警信息到生产调度中心,同时发出语音报警,视频拍照和录像本地留存,可供外部调阅。
5)基于5G 通讯网络应用
相比4G 网络,5G 峰值速率提升了20 倍以上。随着车联网和智能驾驶技术的快速发展,车辆行驶数据采集,处理和交互控制的要求越来越高,庞大的数据交互需求需要超高速率、超低延时的传输,这恰恰是5G 大显身手的地方。
3.3 C-V2X 技术特点及比较
相比普通蜂窝通信,C-V2X 的技术要求更高,需要提供更好的传输、时延、可靠性等能力:物理层结构进行增强,支持更高的速度;支持全球卫星导航系统同步;更高效的资源分配机制以及拥塞控制机制;上下行传输增强;多接入边缘计算能力。
目前C-V2X 在欧洲发达国家已经取得长足的发展,很好的解决了传统的传感器装置成本偏高、在汽车移动距离过大的情况下无法发挥理想的问题。随着技术创新的深入,主要有两条技术路线应运而生,为C-V2X 技术和DSRC 技术。其中,DSRC 属于视距传输技术,在障碍物较多的场景中将会对其造成影响;其次,DSRC 需要复杂、完善的基础设施部署:最后,自动驾驶对通信范围、可靠性、稳健性有更高的要求,DSRC 缺乏未来的技术演进路线。
4 结论
大吨位重型车辆运输矿岩是大型露天矿山运输的主要形式之一,卡车司机存在较大的视觉盲区。露天矿车载监控终端C-V2X 技术通过GNSS 定位,RF 射频与C-V2X 车联网多种技术可实现超速报警、防碰撞预警等关键功能。随着人工智能、计算机视觉技术、“互联网+”、电子技术等学科的引入,露天矿山道路运输环境下的运输安全性必将日益提高。
猜你喜欢
有色金属(矿山部分)(2021年4期)2021-08-30 06:10:38
电子乐园·上旬刊(2021年8期)2021-05-16 09:55:48
现代装饰(2020年8期)2020-08-24 08:22:58
铁道通信信号(2020年8期)2020-02-06 09:13:18
铁道通信信号(2019年9期)2019-11-25 01:44:58
中国公共安全(2017年11期)2017-02-06 05:28:09
电子制作(2016年15期)2017-01-15 13:39:14
中国煤炭(2016年9期)2016-06-15 20:29:54
河北地质(2016年1期)2016-03-20 13:51:56
电源技术(2015年2期)2015-08-22 11:28:14
