
基于Smart3D的双镜头无人机倾斜摄影大面积实景三维建模研究
2021-07-12 03:59:24敖成欢
城市勘测 2021年3期
敖成欢
(贵阳市测绘院,贵州 贵阳 550000)
1 引 言
对于原始倾斜影像的获取,在刘先林院士等人的带动下,2010年研制了我国第一台有人机搭载的倾斜相机SWDC-5[3]。随后各科研院所、企事业单位研制了不同的倾斜数据获取平台,如苑方艳等设计了两个摆动镜头的倾斜摄影数据获取平台[4],甚至都出现了消费级大疆无人机。在倾斜原始影像获取之后的影像匹配技术上,Zitova B,Flusser J将影像匹配技术分为特征提取、特征描述、特征匹配、变化矩阵估算和图像变化5个步骤[5],为影像匹配的技术提供了明确的研究思路。在影像处理阶段为了提高匹配效率构建影像金字塔,对缩小同名点的搜索范围提出核线约束、单位约束和多视匹配等[6~9]。王建强、钟春惺等研究了基于多视航空影像的城市三维建模[10],朱俊锋、牛鹏涛等人探究了基于倾斜摄影技术的城市三维建模[11,12]。谢奇宇、向云飞等人通过LiDAR和倾斜摄影技术的结合优化城市三维模型的构建[13,14]。Super Map、DP molder、EPS、IData等企业产品将倾斜摄影三维模型结合不动产登记、地籍测绘、大比例地形图采集。一系列的研究无疑都是倾斜摄影技术的不断推进、建模技术的不断优化和应用的不断拓展。
因无人机具有体积小、便于携带等优势,成了倾斜摄影测量数据获取的不二选择,但因其载重负荷原因,不能像载人机一样搭载5镜头工业级高分辨率相机,如果为了减轻质量以便搭载于无人机上,则就得压缩集成传感器,牺牲了其高分辨率和对光的敏感度等优点。也有前视、后视和下视的3镜头倾斜摄影,但仍然需要消耗部分动力而缩短续航能力。本文重点研究探讨基于自主研发的双镜头推扫云台下的无人机倾斜摄影三维建模。
2 双镜头倾斜相机云台
对于经典的五镜头倾斜相机的搭载,市场上有载人机、固定翼无人机以及多旋翼。载人机而言,姿态稳定性好,抗风能力强,并且续航能力也非常强,但是运营维护成本高、需要专业的大型起降场地和专业的飞行员等苛刻条件[15]。而无人机则有易携带、易操作和维护成本低等优势,但是其续航能力和载荷能力都偏弱,载荷越重,续航能力就越低,因此,如果为了提高续航能力,势必牺牲传感器固有的优点,目前主流的倾斜摄影传感器搭载体对比如表1所示。
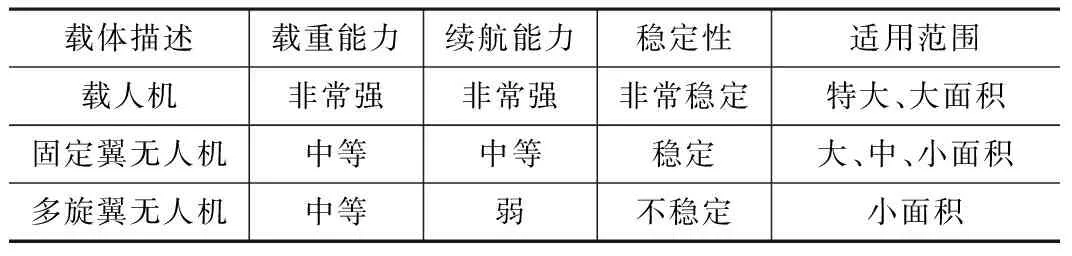
倾斜摄影传感器搭载平台比较 表1
基于以上原因,本文自主研发了针对无人机的双镜头推扫式倾斜摄影传感器搭载云台,为获取丰富的地面纹理信息,在多次实验失败的经验中总结出:
(1)传感器与铅垂线方向角度呈固定40°,以便获取不同高度地面垂直方向的纹理信息。
(2)所搭载的双镜头传感器必须呈十字交叉,在作业过程中呈东西或南北向为宜,这样可以减少地面强光反射和太阳光线折射对影像获取的质量,可以更好地获取地面水平方向的纹理信息。
如图1所示是载有双镜头倾斜相机的无人机在空中的作业概略图,当无人机从固定的规划航线飞过时,双镜头倾斜相机可以方便地获取地面不同方面的纹理信息,从而获取地面纹理信息丰富的原始影像数据。
检测装置选用超低功耗的电子元器件,增加检测装置的使用时长,本文设计的检测装置的电池电量能够使用两年以上。由于检测装置安装在大型机械设备的吊臂前端,应选择具有良好的抗振动、防水、防老化、耐高温和便于安装的外壳结构。检测装置的实物图如图5所示。
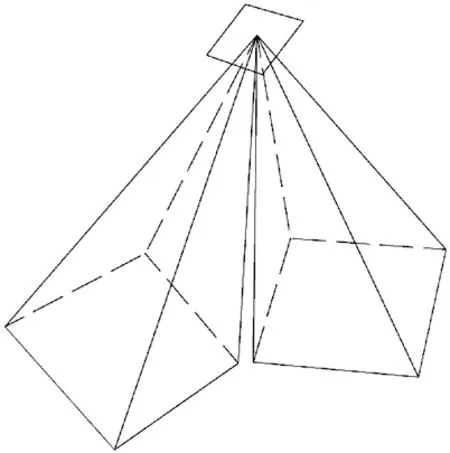
图1 作业模式示意图
3 研究说明
本研究主要针对大面积的无人机倾斜摄影实景三维建模,本文划定了湖南省岳阳市君山区的 21.6 km2,研究区涉及君山区整个城区,低矮建筑与中高层建筑分布较均,因测区范围面积大,也为方便后期对大面积实景三维建模分块处理接边问题的研究,本文将整个研究区进行航摄分区,共分为2个子测区,分别进行数据的获取。如图2所示为研究区域的概图,蓝色线框为主要航摄数据获取区域,红色线框则为2个子区域航线规划范围。以防研究区边上数据可能缺失的情况,本文在其基础上外扩3~4条航线如图2红线所示。为了更好地实现2个子区域的接边,本文对其进行了公共数据的获取,如图2线框重叠部分。

图2 研究区概图
为方便飞行航线的规划设计,这里先介绍数据获取相机,本研究采用SONY黑卡RX1全画幅CCD相机,传感器大小为 35.8 mm×23.9 mm,焦距为 35 mm,有效像素为 2 430万,像幅大小为 6 000×4 000,像元大小为 6 um。实景三维建模软件采用市场上使用最多的Smart3D软件,总体作业流程如图3所示。
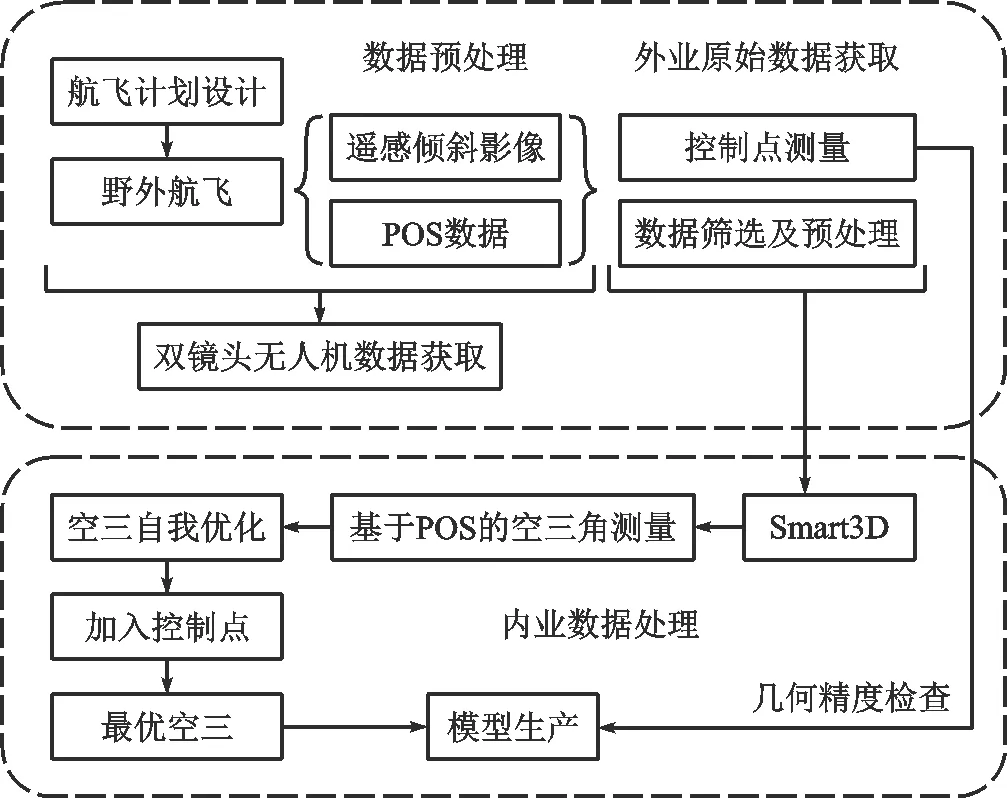
图3 实验作业流程
4 实验应用验证
4.1 无人机飞行航线的设计
本研究采用固定翼无人机搭载自主云台获取研究区原始影像数据,根据无人机导航GPS/IMU定位定向系统和陀螺仪姿态信息获取与影像相对应的POS数据。
飞行航线的铺设。为了高效获取地面纹理信息,本文采用相机像幅长边垂直于航飞方向。①飞行航线的铺设取决于要获取影像的重叠度,由于无人机姿态的不稳定性和抗风能力弱,容易丢片。②该研究对同一地物的采集如图4所示,当飞行平台到达某一个定位置时,不能同时将同一地物不同侧面纹理获取,需要至少4(南北、北南、东西、西东)个方向的航线才能获取同一地物的完整纹理信息。因此本文将影像的航向重叠度设置为80%,旁向重叠设置为70%。

图4 同一地物信息获取方式
4.2 原始影像与POS数据
最终铺设了624 km的总航线,本航摄区采用的固定翼无人机每架次可飞行 60 km的航线长度,为保证原始影像数据的质量,数据采集时要求地物阴影倍数≤1,最后以11架次,共2天时间完成了航摄区原始影像的获取,平均每天5.5架次,每架次平均飞行时间为 1 h。获取了原始影像共 20 649张原始影像,20 818个POS记录,共丢失了169张影像,经人为检查,丢失最多的航线为6张影像,出现连续丢片2张以上共1次,航线内连续丢片处的两张影像重叠度为40%,因两边的旁向此处不丢片,保证了影像最终的重叠。
4.3 像控点的获取
Smart3D软件的空三优化模式是基于空间直角坐标系的优化方式[16],对原POS数据的依赖程度低,主要依靠控制点实现空三匹配点的拉动来完成绝对定向,进而实现模型的绝对定位和几何精度。研究区属于不规则航摄区(如图5所示),因此对于控制点数据的采集必须满足以下要求:

图5 不规则区域网布控制点布设示意图
(1)四周空旷,有明显刺点地物标志,且刺点位置在影像上清晰明了,无遮挡。
(2)2个子区域接边处必须有公共控制点。
(3)范围线边上和转角处控制点适当加密。
(4)范围线内控制点与航线垂直呈“品”字形布设。采用以下像片控制点航向基线数跨度估算公式进行控制点布设。
(1)
(2)
式中:ms:连接点(空三加密点)的平面中误差,单位为mm;mh:连接点(空三加密点)的高程中误差,单位为m;K:像片放大成图的倍数;H:相对航高,单位为m;b:像片基线长度,单位为mm,mq:视差量测的单位权中误差,单位为mm;n:航线方向相邻平面控制点的间隔基线数[17,18]。
(5)为了提高数据获取效率,因地制宜,优先布设控制点在可达性强的地点。
模型的构建采用CGCS_2000平面坐标系,中央经线114,3°分带。因此,控制点坐标的采集采用同样的坐标系。最终获取了航摄区共102个控制点,其中有23个控制点不参与平差并作为后期检查点。
4.4 实景三维模型的构建
基于以上基础,将POS数据通过坐标转换成CGCS_2000的坐标系,在原始影像与POS数据预处理合格后,在控制点采集期间,先将影像分块导入Smart3D,以POS记录辅助完成影像连接点提取、连接点匹配、内定向以及平差等全自动空中三角测量处理,本次空三采用分块集群空三,利用20台工作站分配Smart3D的Engine模块配合完成,对于空三结果不优、分层、错乱和丢片等进行再一次空三,以保证每块区域网内部之间空三结果的最优,若仍然有不能完成空三的情况,则需要等待外业控制点完成以后,用控制点加以约束平差,实现空三优化(如图6所示)。

图6 空三优化对比
在不需要绝对定向,采用自由网生成模型的情况下,最优空三便已经可以用来生产实景三维模型,但是需要用于精准量测、地形图采集、地籍测量、定位导航和不动产登记等方面时,便必须加入控制点以完成最终空三的绝对定向。简单地说,控制点的不可或缺性有以下几点:①辅助空三完成绝对定向。②保证每一个分块区域的绝对定位以及内部地形地物的绝对几何精度。③实现分块区域的实景三维模型无缝接边。
控制点辅助空三完成绝对定位,使得空三生成的点云具有高密集性,每个点云构成的三角TIN网更具细节性,使得实景三维达到更高的可辨识性,包括房屋的屋檐、墙角和信号塔等。如图7所示,所构成的TIN网除了光滑地表点云稀少,复杂地面纹理处点云都比较密集,最终生成的白膜映射纹理后形成的实景三维均具有丰富的纹理细节,几乎没有出现塌陷和缺失的现象。
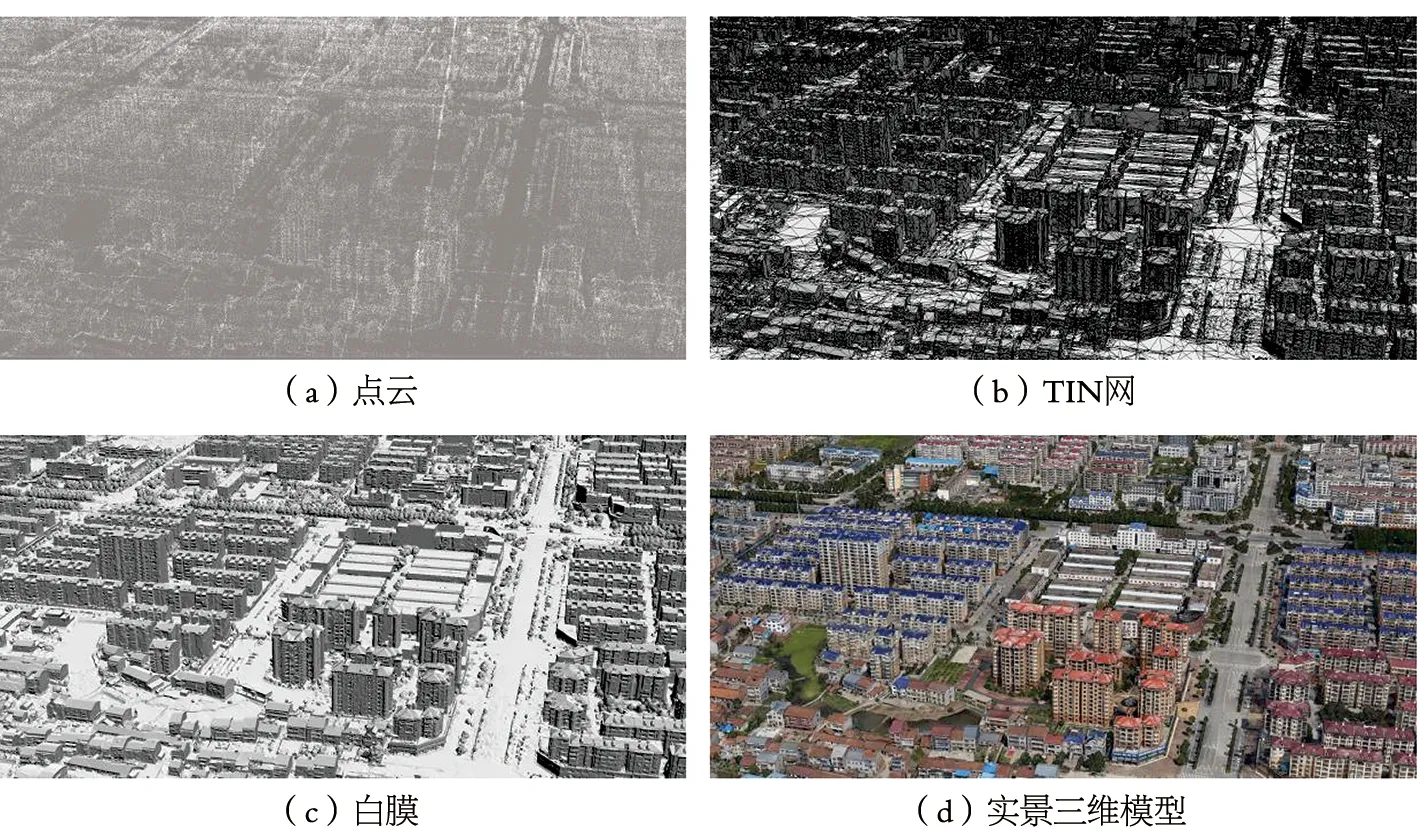
图7 三维模型的构建
4.5 模型几何精度的校验
基于以上基础,本文对模型进行几何精度(平面精度、高程精度)的检验,因模型是采用绝对坐标的控制点对整个区域进行空三加密解算未知点的,为消除加密点与纠正点可能存在的不同误差,在使用不参与平差的23个检查点进行检查外,引入8个参与平差的随机控制点进行检验,结果如图8所示,所有检查点误差都在 0.3 m以内,8个控制点与23检查点的波动变化性具有一定的一致性,证明加密点和纠正点在一定程度上具有统一的误差系统。通过对X、Y、Z坐标进行平均中误差统计,结果分别为 0.124 m、0.117 m、0.044 m。模型显示出特别高的精度,尤其是高程,几乎达到了 5 cm以内,可应用于对精度要求高的行业,如大比例尺地形图的测绘、地籍测绘、土地确权和不动产登记等。

图8 模型几何精度误差
5 结论与讨论
在无人机数据获取中,最终以平均每天5.5架次,每架次平均飞行时间为 1 h,获取了原始影像共 20 649张原始影像, 20 818个POS记录,通过对影像的预处理,对空三进行自优化和控制点绝对优化,生产出最终X、Y、Z中误差分别为 0.124 m、0.117 m、0.044 m的三维模型,通过与相对于3镜头与5镜头的倾斜摄影测量的对比,既不丢失模型几何精度,也不丢失地面纹理信息,相反,载重小,续航能力强,地面纹理信息的细节表现也很丰富,可以很好地应用于地形图测绘、地籍测量、不动产登记、传统村落数字保护、文物保护以及城乡规划等。
(1)因为原始影像对地面信息的获取是通过十字交叉的形式获取的,而且必须十字交叉才能保证地面纹理信息水平方向和垂直方向的完全获取,如果产生偏差,则建筑物等具有不同侧面信息的地物就会丢失纹理,使得实景三维模型中这类地物信息的丢失,对平整地面的影响则不大。
(2)对于原始影像数据的获取需要很大的重叠度,旁向68%以上,航向75%以上。在3镜头和5镜头的倾斜摄影中,因有3个以上视觉的影像重叠,即使局部区域没有达到重叠度,但是由于不同视觉的3°重叠或5°重叠弥补了某一视觉的缺陷,仍然可以很好地建模。
(3)在进行三维模型的生产中,空三结果优异程度决定了最终三维模型的优化程度。第一,在空三解算的时候需要采用原始POS数据进行空三内部结果的优化,第二,采用内部优化的空三结果结合控制点坐标使得空三结果绝对优化,目的是使得模型坐标对应在绝对地理坐标,空三内部结果又进一步优化,滤除误差点和错误点以保证最终三维模型的最优精度。
模型中,靠近边缘的误差稍大些,因此在刺控制点时,应充分保证测绘边缘控制点的充足。部分光滑地面,如水面、雪区等,在空三时特征点较稀少,需要手动添加特征匹配点或者采用不同算法的特征提取进行特征匹配空三。
猜你喜欢
江苏安全生产(2022年5期)2022-06-16 07:51:04
华人时刊(2021年23期)2021-03-08 09:27:24
写真地理(2020年39期)2020-12-23 02:01:59
理论与创新(2020年15期)2020-10-09 11:07:45
辽宁省博物馆馆刊(2020年0期)2020-08-13 09:15:58
企业科技与发展(2018年5期)2018-09-10 00:20:39
北京航空航天大学学报(2017年4期)2017-11-23 05:48:22
北方音乐(2017年4期)2017-05-04 03:40:09
中国工程咨询(2017年12期)2017-01-31 02:56:54
安徽地质(2016年4期)2016-02-27 06:18:21
