
基于激光测距法的煤矿采空区输电线路杆塔沉降在线监测
2021-07-12 08:00郑天堂
西安工程大学学报 2021年3期
赵 隆,袁 鹏,张 翔,郑天堂
(1.西安工程大学 电子信息学院,陕西 西安 710048;2.国网陕西省电力公司榆林供电公司,陕西 榆林 719000)
0 引 言
由于输电线路杆塔的结构特殊性,对地表情况有着较高的使用条件要求[1-2]。随着煤炭开采力度的加大,矿区地表下沉会对架设在该区域内的输电杆塔的稳定造成影响[3-5]。可能会导致输电线塔内各结构发生变形位移,甚至会出现倒塌、断线的情况[6]。
对输电杆塔沉降进行监测,可以获取杆塔的结构状态信息,从而为杆塔的运行维护提供有价值的参考依据。目前,杆塔沉降的监测系统主要有2种,分别为基于倾角传感器的杆塔倾斜度监测系统和基于北斗差分定位技术的杆塔沉降监测系统。文献[1-2]通过在杆塔顶部布置倾角传感器对杆塔的倾斜度进行实时监测,利用杆塔倾斜度判断杆塔的运行状态。文献[3-4]基于北斗差分定位技术的杆塔沉降监测由前端监测装置通过北斗终端获取杆塔的位置坐标,经过坐标转换计算出杆塔的沉降值。
但现存的2种方法都存在各自的缺点,基于倾角传感器的杆塔倾斜度监测只能间接反映出杆塔的沉降状态,不能将杆塔沉降值进行量化,且受单一参数限制[7-9]。基于北斗差分定位技术的杆塔沉降监测误差过大,为±4.5 cm左右[10-12],且实施过程中需要建设基站,费用昂贵,目前还无法大面积开展使用[13]。
鉴于现有输电杆塔沉降监测各种问题,本文提出了基于激光测距法的煤矿采空区输电线路杆塔沉降在线监测系统,可以直接将杆塔塔腿沉降值量化,且监测精度高,误差在±2 mm以内。
1 杆塔沉降监测原理
采空区塌陷后,输电杆塔基础产生沉降与水平位移,导致塔腿高度差发生变化[14-15]。因此,可以利用直角三角形模型推算出杆塔发生沉降后塔腿高度差的变化值。杆塔沉降测量方法如图1所示。

图 1 杆塔沉降测量方法Fig.1 Tower settlement measurement method
图1中,在杆塔塔腿底部安装激光测距标靶,激光测距标靶由2块反射板组成,1块为垂直反射板,其安装方向为垂直于地面,另外1块为倾斜反射板,安装方向为与地面形成一个60°的夹角,倾斜反射板和垂直反射板在同一个平面内形成一个直角三角形。杆塔发生了沉降后,由于地脚螺栓对杆塔塔腿的约束力,塔腿自由度受限制。因此,当杆塔发生沉降后,激光测距传感器与垂直反射板之间的距离l不会发生变化,而与倾斜反射板之间的距离d会发生变化,变化值为Δd。最后,通过几何运算可以得出杆塔的沉降值Δh。
2 杆塔沉降监测装置设计
2.1监测系统架构
输电线路杆塔沉降在线监测系统架构如图2所示。

图 2 监测系统Fig.2 Monitoring system
激光测距传感器布置在距离杆塔腿2 m处,测量与激光测距标靶之间的距离。激光测距传感器通过LoRa与监测主机之间进行通信,当激光测距传感器测量到与激光测距标靶之间的距离时,将距离值通过LoRa发送到监测主机进行数据处理,得到杆塔塔腿的沉降值。监测主机通过3 G/4 G通信方式将杆塔沉降数据发送到监控中心,监控中心实现对杆塔塔腿沉降值进行实时数据展示,从而实现对杆塔沉降的监测。
从图2可以看出,监测系统由激光测距传感器、监测主机和监控中心构成。激光测距传感器是采集塔腿沉降信息最直接的元件,它的测量精度决定着整个监测系统的精确度。随着物联网传感技术的快速发展,传统的监测传感器会涉及到信号传输线铺设工作,铺设后的信号传输线容易受到环境的侵蚀引起设备故障[16-17]。基于LoRa无线传输技术,实现传感器的无线传输,无需再考虑安装时信号线的固定问题[17]。监测主机大部分安装在杆塔横担上,在整个监测系统扮演着汇聚节点的角色,用于构成全覆盖的传感器网络,用来完成LoRa无线倾角传感器采集数据的收集和计算,将计算出来的杆塔沉降信息进行加密,然后汇总和打包,在满足《电力用户用电信息采集系统通信协议:主站与采集终端通信协议》的基础上通过光纤或者4G通信方式发送至监控中心[18-21]。监控平台具有实时数据展示、趋势图表分析、状态信息查询、历史数据查询、远程更新升级、数据统计分析等功能。
2.2 激光测距传感器设计
1)硬件设计。激光传感器采用相位法激光测距技术,通过激光传感器发射无线电波段频率的激光进行幅度调制,并将正弦调制光往返测距仪与目标物间距离所产生的相位差测定[22],根据调制光的波长和频率,计算出激光的飞行时间,再计算出待测的距离[23]。根据激光测距传感器测距原理,本文选用32位存储器接口和三段流水线架构的STM8S207作为主控芯片,主控芯片通过控制电源模块来达到对系统功耗的降低,并将处理好激光测距传感器测量数据发送到监控主机。
2) 标定方法。由于本文的设计装置安装在户外环境,太阳光照强度的变化容易对激光测距传感器的测距结果造成影响,带来误差。为了减小因光照强度影响带来的误差,本文设计的激光测距传感器通过监测补偿法来降低太阳光照强度的影响[20],具体实施手段如下:
选定时间为2020年12月23日7:00—19:00,在西安工程大学110 kV猫头塔处测量激光测距传感器到激光测距标靶之间距离,当天天气多云/晴天,气温为-2 ℃~9 ℃。为保证激光测距传感器的测距误差达到最小,通过在不同标准距离下的多次测量来观察测量误差的变化范围,从而选取合适的方法来消除测量误差。具体操作是以1 m、2 m和3 m为标准距离,每1 h测1次激光测距传感器到激光标靶之间距离并记录光照强度,为避免测量误差每次测量3次,如表1所示。

表 1 不同时间下激光测距传感器测量数据Tab.1 Measurement data of laser range sensor at different time
从表1可以看出,数据波动范围最大时刻为9:00—15:00,而引起误差的原因不仅仅是太阳光照强度,还有可能是激光测距传感器摆放位置,为了减小误差对最终监测结果的影响,可以通过最小二乘法对误差参数进行拟合。
环境误差和激光测距传感器关系式可表示为
bi=a0+a1xi1+…+bnxin+ei
(1)

(2)
则
(3)
为了使残差最小,由微分的极值原理,ai应满足:
(4)
求解式(2)可以得到回归系数{a}。代入式(1)即可得工作温度和电容的标定曲线。最后在软件程序中就可以实现测量误差对测量距离的监测补偿。
2.3 监测主机设计
监测主机由主控制器和供电单元组成,由于监测主机作为数据处理的中心,对数据处理时效性具有很高的要求,因此主控芯片选用了基于Arm©Cortex©-M4的32位RISC内核STM32L433VCT6,其工作频率高达80 Hz,且具有单精度浮点单元(FPU),支持所有Arm©单精度数据处理指令和数据类型[24]。此外,为了保证监测主机能够长期有效稳定运行,通过供电单元中的太阳能电池和蓄电池组合为其供电[25]。
监测主机程序设计时需要考虑环境因素对装置可靠性的影响,此外边缘节点还要实现与供电单元、激光测距传感器以及监控中心之间的多任务切换,因此本文采用基于STM32L433VCT6及嵌入式RT-Thread实时嵌入式操作系统的设计方案,在完成各种功能的前提下,提高系统稳定性及运行速率,并降低系统的整体功耗,具体程序设计流程如图3所示。

图 3 监测主机程序流程Fig.3 Monitoring host program flow
图3为监测主机软件设计工作流程图,为了保证监测主机与监控中心通信时序同步且通信正常,在监测主机上电初始化后,监测主机会向监控中心发送请求校时指令,若校时指令得不到回复说明校时失败,监测主机则继续向监控中心发送请求,若连续3次请求校时仍然失败,证明监测主机与监控中心存在通信故障,需要技术人员进行维修。
若双方校时成功,计时器将被打开,装置自动进入低功耗模式。当监测主机接收到了来自监控中心的请求数据命令或计时器满4 h,边缘节点会向电源控制器下发开启传感器电源的命令,传感器电源打开后,激光测距传感器就会采集与激光测距标靶之间的距离。监测主机根据上述杆塔沉降计算方法计算出杆塔沉降值。将杆塔沉降值进行打包并发送给监控中心,流程结束后,监测装置进入低功耗模式等待下一次请求命令或下个计时周期。假如监测主机处理出来的数据为异常数据,为了防止外部环境造成的干扰,监测主机将再次发出命令激活传感器进行数据采集,若第2次测量的结果仍然超过所设定的阈值,则监测主机会产生一个预警信号并随数据一起打包发送给监控中心,反之则认为是外界环境对传感器采集数据造成的干扰。
3 实验及数据分析
3.1 实验平台搭建
根据杆塔沉降量监测方法,设计出杆塔沉降监测装置,在西安工程大学110 kV输电杆塔上安装了这套监测装置,对系统的性能进行测试,如图4所示。
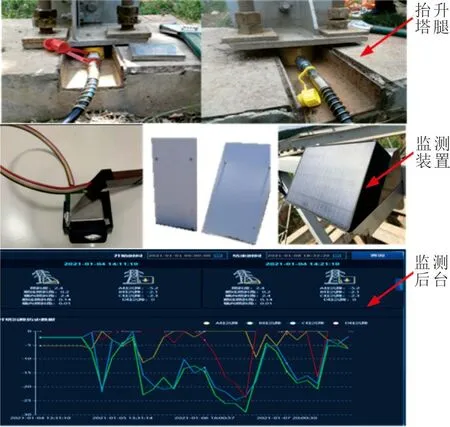
图 4 杆塔沉降系统测试平台Fig.4 Test platform for tower settlement system
通过液压千斤顶将塔腿以5 mm/次的幅度进行抬升来模拟杆塔沉降情况,由于实验平台的限制,最多只能够抬升70 mm。竖直反射板和倾斜反射板安装在塔腿底部位置,激光测距传感器布置在距离激光测距标靶2 m,实时采集与激光测距标靶之间的距离,进而计算出杆塔的沉降值。
3.2 数据分析
为了验证基于激光测距法的杆塔沉降监测系统的准确性,同时利用电子经纬仪对杆塔的沉降值进行观测,监测数据如图5所示。

图 5 监测数据Fig.5 Monitoring data
从图5可以看出,基于激光测距法的杆塔沉降监测系统测试结果与电子经纬仪观测到的结果基本相同,证明基于激光测距法的煤矿采空区杆塔沉降监测系统可以运用于煤矿采空区杆塔沉降监测。相较于当前的输电杆塔沉降在线监测系统,基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统具有可直接将杆塔沉降值量化,测量精度高,数据处理快捷及安装操作简单的优点。
1) 基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统,相较于基于倾角传感器的输电杆塔倾斜度监测系统,激光测距法能够对杆塔的沉降量直接测量和分析,计算时也不需要知道杆塔高度,故而不存在受参数限制的问题。
2) 基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统具有测量精度高,数据处理简单实施。基于北斗差分定位的杆塔沉降监测系统需要对杆塔坐标进行多次转换之后计算出杆塔的沉降信息,且误差在±4.5 cm左右。相较于上述监测手段,基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统只需要通过几何运算就可以获得杆塔的沉降值,数据处理方式简单快捷,且误差在±2 mm以内。
3) 基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统安装操作非常方便,布置时只需将激光测距标靶布置在杆塔塔腿底部,激光测距传感器布置在距离激光测距标靶3 m内即可。而基于倾角传感器的输电杆塔倾斜度监测系统需要将传感器布置在杆塔顶部和杆塔高度的2/3处,安装难度大,并且基于北斗差分定位的输电杆塔沉降监测系统需要建立基站,在杆塔顶部和底部安装监测站,工程量非常大且费用昂贵。
4 结 论
1) 基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统,通过激光测距传感器与激光测距标靶之间距离的变化来反映杆塔的沉降量,得出杆塔塔腿沉降情况。
2) 实验数据表明,基于激光测距传感器的煤矿采空区输电线路杆塔沉降在线监测系统测量误差最大为2 mm,与其他监测方法相比,系统结构更为简单、精度更高。
3) 利用该系统得到的杆塔塔腿沉降数据来分析杆塔运行情况,为采空区输电线路安全运行提供了理论依据和参考。
猜你喜欢
交通世界(2022年27期)2022-10-17
有色金属(矿山部分)(2022年2期)2022-07-13
卫星应用(2022年1期)2022-03-09
新疆钢铁(2021年1期)2021-10-14
机电信息(2020年12期)2020-06-29
建筑建材装饰(2017年7期)2017-07-04
电脑知识与技术(2016年7期)2016-05-19
中国高新技术企业(2015年25期)2015-07-24
科技与创新(2015年9期)2015-06-02
中国高新技术企业(2015年12期)2015-03-31
