基于优先队列回溯算法的电子航道图航路规划设计
2021-07-11 10:59马志云施俊羽
中国水运 2021年3期
马志云 施俊羽


摘 要:电子航道图航路规划是指长江航道中的船舶利用自然水深航行,对于不吃水船舶要结合航道实际情况和船舶航行基础,对航路进行合理规划。本文利用优先队列回溯算法,设计电子航道图航路规划。从实验结果可以看出,此算法能够对航道进行快速、精准、合理的规划,运行速度快,航道规划需求得到满足,具有较强实用性。
关键词:优先队列回朔算法;电子航道图;航路规划
中图分类号:U612.2 文献标识码:A 文章编号:1006—7973(2021)03-0072-03
航运作为国民经济基础产业,在服务性行业和综合运输体系中具有重要地位,其占地少、能耗比较小、成本低、运能比较大,促进了航运的发展。在科学技术和信息技术不断发展的过程中,航运以数字航运、智能航运作为主要发展目标。在大型化、信息化船舶数量的现代航运技术不断发展和使用的过程中,电子航道要求权威、精准、丰富的支持。所以,为了促进航运发展,满足社会需求,要求实现电子航道图航路的规划设计[1]。
1航道规划中的问题
航路规划目的就是以船舶在长江中的吃水进行航路的合理规划,使船舶在长江中能够顺利航行,并且对长江航道最大通行量进行保证,提高经济效益。通过几何观点分析,问题主要包括:C指约束集,S指资源集,E指需求集,最终目标为需求集中全部元素处于集合S中,从而使映射满足约束集[2]。
结合实际情况,需求集是指船舶集E={1,2,3,....},通过此编号能够实现传播具体信息的提取,比如传播长度、宽度、载重量、航速等。
资源集指的是长江断面集S={1,2,3,...},元素指的是断面编号,从而得到断面基本信息,包括断面分叉、断面测点深度等信息。主要硬约束包括:
其一,航路水深。在航路水深规划过程中,要求大于船舶吃水,确定在规划航路中船舶能够安全的运行;
其二,航路宽度。使航路宽度设置为船舶宽度的2.0B-4.5B,在行驶过程中,船舶会受到水流、风向的影响,轨迹无法平行与航路,那么导航中的船舶左右摆动;
其三,航路底边和船舶富裕间距。为了避免由于岸吸导致船舶存在搁浅的问题,要求保此河底一定的距离[3]。
2航路规划算法
2.1优先队列
优先队列指的是以临近排序思想作为基础,实现数据集排序,对比小范围记录,将重复记录精准提取。通过所抽取的字段实现关键字创建,之后排序,并且寻找数据库中固定范围中队列匹配记录[4]。
2.2创建环境模型
在规划航路前,要先在内部世界模型中实现环境障碍物表示模型的创建,使规划航路时搜索量得到降低。现代国内外对环境建模方法进行研究,包括拓扑图法、可视图法、单元数法等,本文使用栅格法实现建模。此方法主要原理就是使船舶工作空间划分多个小栅格,每个小栅格接近周围栅格,创建栅格地图。内河水域通航环境对比海洋环境,影响因素比较复杂[5]。所以,利用优化队列回溯算法规划全局路径,通过电子航道图得出船舶工作过程中环境信息,通过栅格对船舶工作空间进行划分,创建栅格地图,使船舶运动轨迹与环境中信息在栅格地图中进行存储,包括不完全可行、完全不可行、完全可行的栅格。先使不完全可行栅格在完全不可行栅格中创建,障碍栅格为安全可行栅格,表示为涂黑的方块。船舶起始位置栅格值得就是起始栅格和船舶目标位置栅格,最后对栅格环境编号进行划分[6]。
模型创建后进行存储,利用行列划分矩阵存储的方法实现栅格存储,创建数组与栅格的关系,图1为栅格环境模型。对建模复杂性进行考虑,使船舶在栅格运行过程中定义八种,详见图2。电子航道图能够提供给船舶全局环境的信息来源,通过以上创建的环境模型,对电子航道图进行栅格化,使电子航道划分的栅格具有相同的大小,利用栅格地图标记值存储环境信息[7]。
2.3算法描述
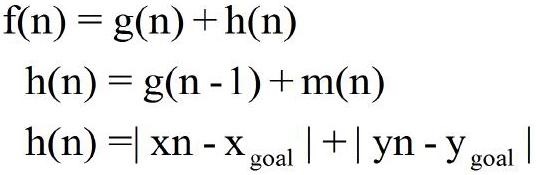
利用节点到目标节点的初始节点最小代价途径估计模型表示为:
公式中的g(n)指的是前个节点到目前节点需要的代价和,m(n)为前个节点在目前节点运动所花费的代价,h(n)为实际环境节点n到目标节点的曼哈顿距离,(xn,yn)指的是节点n坐标值,(xgoal,ygoal)指的是目标节点坐标值。
3实验效果和分析
先导入原始数据,用户要输入航道水深、航宽、弯曲半径,计算机以实际需求计算航道,使用户输入参数得到满足。使航标点在已经规划航道中添加,对规划河道利用优先队列回溯算法正确规划航道,满足航道宽度需求,并且能够缩小挖凿区域。
另外,针对不规则航道区域,对测试算法精准性进行分析,观察自动规划与实际规划的航道是否相同。在不规则河道中,通过本算法规划。两条航道通航,通过算法对使用哪一条进行选择。标注航道,将航标点进行显示。针对不规则河道,尤其是分叉河道,人为观察是无法对具体通航区域进行判断的。通過本文算法,左右航道都能够通航,但是要利用具体计算选择哪条航道最优,选择合适算法与结果精准性具有密切关系,图3为航道规划的环境模型。
4电子航海图规划的建议
我国内河电子航道图规划现状会影响到我国内河航运的发展,为了促进我国内河航运健康发展,针对电子航海图规划提出以下建议:
其一,统筹规划。目前,缺乏电子航海图航路规划的统一规划,在技术方面并没有政策支持,生产力量分散,缺乏完善管理。所以,要创建强有力协调领导小组,使管理与规划得到加强。与我国内河航运具体情况结合,实现满足航路规划发展、使用和发布的标准制定;
其二,创建资源整合平台。以我国目前电子航道图自成体系情况,创建电子航道图生产与服务平台,从而实现资源共享,统一发布信息。不仅能够避免资源浪费与重复开发,还能够强化管理,提高对外服务能力;
其三,加強合作。对电子航道图航路规划的标准进行研发与制定,与国际区域之间的合作得到加强,积极地参与到国际内河电子航道图协调小组相应会议中,并且及时掌握电子航道图的发展,有效促进我国航路规划的发展[8]。
5结束语
目前,我国内河航运在不断的发展,但是因为内河航运发展比较晚,相应的标准研发也比较晚。所以,就要针对我国内河航运的问题与国内内河航运具体情况,使用智能化航运和电子化航运,设计电子航道图航路规划,对相应的标准进行完善,促进我国内河航运快速健康的发展。
参考文献:
[1]王兰, 张龙信, 满君丰,等. 异构计算环境下基于优先队列划分的调度算法[J]. 小型微型计算机系统, 2020, 041(002):303-309.
[2]杨传印, 黄玮, 薛少聪,等. 基于优先队列的时变网络最短路径算法[J]. 计算机应用研究, 2019, 36(05):129-134.
[3]易黎. 一种基于给定目标节点的个性化PageRank算法设计[J]. 计算技术与自动化, 2020, 039(001):101-105.
[4]陈志轩. 工业无线网络TSN实时优先队列调度算法研究[J]. 软件工程与应用, 2019, 8(6):8.
[5]万平. 基于A-star算法的航路规划算法设计与仿真研究[J]. 中国水运.航道科技, 2018, 000(004):P.58-65.
[6]胡阳, 张谧, 王玲,等. 人工智能用于船舶航线优化的有效方案[J]. 科技创新导报, 2019, v.16;No.503(35):143+145.
[7] Lu Xuan Xuan, Zhao Rui, Zhao Zhiming, et al. Research and Application of Optimization of Electronic Channel Map Making Based on Maritime Charting [J]. China Water Transport (first half month),2018000(010):32-35.
[8] Xu Ning, Zhao Zhiming, Lu Xuanxuan, et al. J]. on Construction of Electronic Navigation Map and Safety Management Platform for Inland Waterways Henan Science and Technology ,2019000(010):24-26.