结构动力学中若干问题辨析
2021-07-08 10:59潘旦光鲁文艳
高等建筑教育 2021年2期
潘旦光 鲁文艳

摘要:针对结构动力学教学过程中运动方程建立、运动方程求解的若干问题进行讨论,主要包括动力学和静力学刚度系数的区别,频响函数和脉冲响应函数的Fourier变换条件及对动力反应的影响,滞后阻尼体系的频响函数等问题。仅考虑集中质量平动自由度的体系,动力学刚度系数是指平动自由度产生单位位移而转动自由度放松情况下所受的力,静力凝聚方法和单位位移法所得刚度系数是相同的;无论是无阻尼体系还是有阻尼体系,频响函数和脉冲响应函数的Fourier变化关系都精确成立;时域特解包含稳态振动和伴生自由振动,而频域特解仅为体系的稳态解,两者之间的差别主要在振动的初始阶段,自振频率越低,差别越大。对于滞后阻尼体系,负频率的频响函数应为正频率频响函数的共轭函数。
关键词:刚度系数;静力凝聚;时域方法;频域方法;滞后阻尼
中图分类号: TU311.3;G642.3 文献标志码:A 文章编号:1005-2909(2021)02-0079-11
结构动力学是结构抗震抗风设计的基础,是土木工程专业非常重要的一门课程[1-3]。土木工程中大量的建筑为杆系结构,因此,结构动力学的教学内容以集中质量平面杆系结构的动力反应为主。下面对杆系结构中运动方程的建立和求解中易混淆的若干问题进行讨论。
在运动方程建立方面,平面杆系结构每个结点有3个自由度,包括2个平动自由度和1个转动自由度。在静力学位移法中通过附设刚臂和链杆得到体系的自由度[4],在动力学计算中常采用集中质量模型,且忽略质量的转动惯量,因此动力自由度仅包含平动自由度[5]。此时,以刚度法建立运动方程时动力自由度刚度系数的求解是计算的难点。事实上,动力学刚度系数和静力学刚度系数是有区别和联系的,为说明两者之间的联系,将通过静力凝聚[6]的方法说明动力学刚度系数是转动自由度放松下,动力平动自由度产生单位位移所需施加的力。
在运动方程的求解方面,为求体系的动力反应常用时域方法或频域方法。时域的计算方法很多,包括杜哈梅(Duhamel)积分法、中心差分法、Newmark法等直接积分法。时域法的核心是脉冲响应函数,而频域法的核心是频响函数。虽然大部分教材中论述了脉冲响应函数和频响函数互为Fourier变化对,但是,在证明时通常将时域积分上限和下限扩展到无穷大,
然后,令时域结果等于频域结果[7-8]。这易于造成时域解和频域解总是相等及脉冲响应函数和频响函数成为Fourier变换对仅适用于有阻尼体系的误解。事实上,由于伴生自由振动的存在,时域解与频域解有一定的差别。无论体系有无阻尼,脉冲响应函数和频响函数Fourier变化关系都是成立的。同时,随着大量材料耗能的实验结果与频率无关[9-10],此时,采用滞后阻尼模型更符合实验结果。但直接利用滞后阻尼建立的频响函数是关于频率的偶函数,将导致频域计算结果不正确。针对频域解和时域解的问题,首先从广义Fourier变换角度讨论脉冲响应函数和频响函数Fourier变化关系,然后,讨论频域解和时域解的差异,以及滞后阻尼模型的复系数动力方程表示方法。
一、静力学和动力学刚度系数的区别和联系
所谓的刚度系数是指产生单位位移所需施加的力。这个定义既适用于静力学刚度系数又适用于动力学刚度系数。求刚度系数时,首先用附加约束将所有自由度约束,然后,使待求自由度产生单位位移,求解所需施加的力。差别在于静力学刚度系数求解时,附加约束针对所有的平动自由度和转动自由度。对于忽略质量转动惯量的集中质量模型,动力自由度不包含转动自由度,因此,附加约束仅为约束平动自由度的附加链杆,即动力学刚度系数求解时,附加链杆产生单位位移时,杆端是存在转角的。因此,动力学刚度系数可采用静力学中的位移法进行计算[11],具体求解方法如下:
(1)在平动自由度相关位移处施加链杆约束;
(2)使链杆产生单位位移;
(3)用位移法或力法求解由超静定结构支座位移引起的结构内力,并画出弯矩图;
(4)根据结构弯矩图计算附加约束的支座反力,即为动力自由度的刚度系数。
以带集中质量的横梁刚度为有限值的刚架为例,说明动力学刚度系数的求解,如图1(a)所示。在忽略桿件轴向变形的情况下,该结构只有一个水平自由度。为求解体系的刚度系数,可在水平位移方向附设水平链杆,如图1(b)所示,并使水平链杆产生单位位移,此时附加链杆所受的力就是刚度系数。因此,通过支座位移下超静定结构的计算,可绘制单位位移下的弯矩图,如图1(c)所示,取横梁为隔离体,如图1(d)所示,得到该体系的刚度系数k=84EI5l3,
则体系的自由振动方程为
由上面的分析可知,刚度依然是产生单位位移所需施加的力,这和静力学的定义一样。但横梁刚度为有限值,图1(b)在产生单位水平位移的同时,节点B和C是存在角位移的。静力学中对每个角位移和线位移分别产生单位位移,其余自由度位移为零下求得刚度系数。动力学中,没有转动自由度相关的动力荷载,转动自由度可由平动自由度根据静力关系求解,而不作为独立自由度。这表明静力学和动力学的刚度系数本质是一样的,动力学中转动自由度可以采用静力方法由平动自由度求解,无需作为独立变量而在形成动力运动方程前将转动自由度凝聚。从这个角度看,集中质量的刚架体系,平动自由度的动力学刚度系数实际上就是静力学刚度系数采用静力凝聚法而得到的结果。因此,动力学刚度系数计算时,可以先采用静力学方法计算平动和转动的刚度矩阵,采用静力凝聚的方法将转动自由度凝聚后所得的刚度就是动力学刚度系数。根据这个思路,在求解图1的运动方程时,可先假定体系具有3个自由度:横梁的平动自由度u,B点、C点的转动自由度θ1和θ2,如图2所示。
则由位移法可得体系的静力学刚度矩阵
[K]=k11k12k13k21k22k23k31k32k33(2)
式中:刚度系数k11=24EIl3,k22=k33=8EIl,k12=k21=k13=k31=-6EIl2,k23=k32=2EIl。用u,θ1,θ2表示图1(a)体系的自由振动运动方程为
m00000000u¨θ¨1θ¨2+k11k12k13k21k22k23k31k32k33uθ1θ2=000 (3)
由于θ1,θ2不存在惯性力,采用静力凝聚法[7]可得
θ1θ2=-k22k23k32k33-1k21k31u(4)
將式(4)代入式(3)第一行的方程可得
mu¨+ku=0(5)
式(5)中
k=k11-k12k13k22k23k32k33-1k21k31(6)
将刚度系数代入式(6)可得k=84EI5l3,与式(1)中的刚度系数k相同。由式(4)可知,在得到u的时程后,可采用静力方法得到θ1和θ2的时程,即转动自由度存在但不独立。因此,从刚度系数的角度看,静力学和动力学是相同的,区别在于以集中质量杆系结构求解平动自由度的动力学刚度系数时,杆端的转动自由度是放松的,而求解平动自由度的静力学刚度系数时,转动自由度是约束的。
二、频响函数和脉冲响应函数的关系
在任意荷载f(t)作用下,单自由度粘滞阻尼体系的强迫振动方程可表示为
mu¨+2mωζu·+ku=f(t)(7)
式中:u,u·和u¨分别为位移、速度和加速度,m和k分别为体系的质量和刚度系数,ζ为体系的阻尼比,ω=k/m为体系的自振频率。
在零初始条件下,由杜哈梅积分可得式(7)的时域分析结果
u(t)=∫t0p(τ)h(t-τ)dτ(8)
式中:h(t)为脉冲响应函数。利用Fourier变换可得式(7)的频域解为
u(t)=12π∫+∞-∞H(θ)F(θ)eiθtdθ(9)
式中:F(θ)为f(t)的Fourier变化,H(θ)为频响函数。脉冲响应函数和频响函数为Fourier变换对。 即:
H(θ)=∫+∞-∞h(t)e-iθtdt
h(t)=12π∫+∞-∞H(θ)eiθtdθ(10)
为证明式(10)中的Fourier变换,结构动力学教材[7-8]通常将时域积分上限和下限扩展到无穷大,并令时域解和频域解相等,即:
u(t)=∫+∞-∞p(τ)h(t-τ)dτ=12π∫+∞-∞H(θ)F(θ)eiθtdθ (11)
在时域积分下限方面,由于t<0时,p(t)=0,因此,时域积分下限由0变为-∞不影响计算结果。在时域积分上限方面,克拉夫[7]认为积分的哑标大于积分上限时,脉冲响应函数为零,因此,积分上限由t改变为+∞不影响积分结果。而俞载道[8]则认为对于有阻尼体系,当时域积分上限为+∞时,初始条件的影响对体系的影响可忽略不计,体系进入稳态振动。这些解释易于产生以下两方面误解:(1)根据克拉夫的解释,易于误解时域解与频域解在任意时刻的位移反应都相等。(2)根据俞载道的解释,只有当体系存在阻尼时,瞬态振动的影响才能被消除,此时脉冲响应函数和频响函数互为Fourier变化对才成立。为此,从数学角度证明无阻尼体系(ζ=0)和有阻尼体系(ζ≠0)的脉冲响应函数和频响函数互为Fourier变换对的关系。
1.无阻尼体系
无阻尼体系的脉冲响应函数可表示为
h(t)=1mωsinωtt00t<0(12)
根据Fourier变换的定义,式(12)的Fourier变换可表示为
H(θ)=∫+∞-∞h(t)e-iθtdt=1mω∫+∞0e-iθtsinωtdt (13)
利用Laplace变换[12]
∫+∞0e-atsinbtdt=ba2+b2(14)
将a=iθ,b=ω代入式(14)可得
H(θ)=1m(ω2-θ2)(15)
式(15)所得结果就是无阻尼体系的频响函数,这表明,无阻尼体系的频响函数和脉冲响应函数互为Fourier变化对是成立的,无需利用阻尼消除瞬态反应。
2.有阻尼体系
有阻尼体系的脉冲响应函数可表示为
h(t)=1mωde-ζωtsinωdtt00t<0 (16)
式中:ωd=ω1-ζ2为有阻尼体系的自振频率。根据Fourier变换的定义,式(16)的Fourier变换可表示为
H(θ)=∫+∞-∞h(t)e-iθtdt=1mωd∫+∞0e-(ζω+iθ)tsinωdtdt(17)
将a=ζω+iθ,b=ωd代入式(14)可得
H(θ)=1m(ω2-θ2+i2ζωθ)(18)
式(18)所得结果就是有阻尼体系的频响函数。式(15)和式(18)由脉冲响应函数Fourier变换的定义直接计算得到,这表明无论体系是否存在阻尼,脉冲响应函数和频响函数都互为Fourier变换对,而无需引入其他条件。
三、时域解和频域解的差异
在非零初始条件下,任意荷载下式(7)的时域完全解可表示为
u(t)=e-ζωt(A1cosωdt+A2sinωdt)+∫t0 f(τ)h(t-τ)dτ (19)
u·(t)=-ζωe-ζωt(A1cosωdt+A2sinωdt)+ωde-ζωt(-A1sinωdt+A2cosωdt)+∫t0 f(τ)dh(t-τ)dtdτ(20)
在同样情况,频域的完全解可表示为
u(t)=e-ζωt(B1cosωdt+B2sinωdt)+12π∫+∞-∞H(θ)F(θ)eiθtdθ(21)
u·(t)=-ζωe-ζωt(B1cosωdt+B2sinωdt)+
ωde-ζωt(-B1sinωdt+B2cosωdt)+12π∫+∞-∞ iθH(θ)F(θ)eiθtdθ(22)
式(20)~式(22)是在相同初始条件下同一体系的位移和速度反应,因此,两者的计算结果必然完全相同。但是,方程中的待定常数是不同的。若已知体系的初始位移和初始速度为u(0)和u·(0),則由式(19)和式(21)可得
u(0)=A1=B1+12π∫+∞-∞ H(θ)F(θ)dθ(23)
由式(20)和式(22)可得
u·(0)=-ζωA1+ωdA2=-ζωB1+ωdB2+12π∫+∞-∞ iθH(θ)F(θ)dθ(24)
A1和A2表示由初始条件所引起的自由振动,当体系为零初始条件时,A1和A2都等于零。事实上,体系的瞬态振动既包括由初始条件所引起的自由振动,还包括受强迫振动荷载引起的伴生自由振动[11]。而式(9)频域解的计算结果仅包含稳态振动,因此,频域完全解中的待定常数B1和B2包括自由振动和伴生自由振动的影响。从这个角度看,A1和A2实际上仅反映了体系自由振动。两种求解方法待定系数的差别在于伴生自由振动,即:
A1-B1=12π∫+∞-∞H(θ)F(θ)dθ(25)
A2-B2=12πωd∫+∞-∞(ζω+iθ)H(θ)F(θ)dθ (26)
由此可知,对于有阻尼体系,当t→+∞时,瞬态振动的影响可忽略不计,式(11)成立。对于无阻尼体系和有阻尼体系的初始阶段,式(11)是不成立的。因此,式(11)仅在有阻尼体系t→+∞时才成立,而不适用于无阻尼体系,则以此为基础进行频响函数和脉冲响应函数的证明不是很严密。
为加强对时域解和频域解差别的理解,下面分别用时域方法和频域方法计算简谐荷载和地震作用下单自由度体系的解。
算例1:分别用时域方法和频域方法计算无阻尼单自由度体系在简谐荷载f(t)=f0sinθ1t作用下的特解。
(1)时域解
根据式(12)的脉冲响应函数,由式(8)可得
u(t)=f0mω∫t0sinθ1τsin[ω(t-τ)]dτ=
-f0kθ1/ω1-θ21/ω2sinωt+f0k11-θ21/ω2sinθ1t(27)
(2)频域解
首先计算荷载的Fourier变换
F(θ)=f0∫+∞-∞sinθ1te-iθtdt=iπf0[δ(θ+θ1)-δ(θ-θ1)](28)
式中:δ为单位脉冲函数。将式(28)和式(15)代入(9),可得
u(t)=f0i2∫+∞-∞H(θ)[δ(θ+θ1)-δ(θ-θ1)]eiθtdθ=f0k11-θ21/ω2sinθ1t (29)
对比式(27)和式(29)可知,时域解比频域解多一项与自振频率相关的函数-f0kθ1/ω1-θ21/ω2sinωt。这项是体系的伴生自由振动,而频域解仅包含稳态振动,无阻尼体系的时域解和频域解并不相同。
算例2:分别用时域方法和频域方法计算有阻尼单自由度体系在简谐荷载f(t)=f0sinθ1t作用下的特解。
(1)时域解
根据式(16)的脉冲响应函数,有阻尼体系的杜哈梅积分为
u(t)=f0mωd∫t0e-ζω(t-τ)sinθ1τsin[ωd(t-τ)]dτ=
-e-ζωt(ζωD+θ1Cωdsinωdt+Dcosωdt)+Csinθ1t+Dcosθ1t(30)
式中:C=f0mω21-v2(1-v2)2+(2ζv)2,D=f0mω2-2ζv(1-v2)2+(2ζv)2,v=θ1/ω。
(2)频域解
荷载的Fourier变换如式(28)所示,将式(28)和式(18)代入(9),整理后可得
u(t)=f0i2∫+∞-∞H(θ)[δ(θ+θ1)-δ(θ-θ1)]eiθtdθ=Csinθ1t+Dcosθ1t (31)
式(30)和式(31)再一次表明时域解中包含伴生自由振动,而频域解仅包含稳态振动。对于有阻尼体系,时域积分上限趋向于无穷大时伴生自由振动趋向于零,时域解的稳态振动解等于频域解。
算例3:地震反应分析
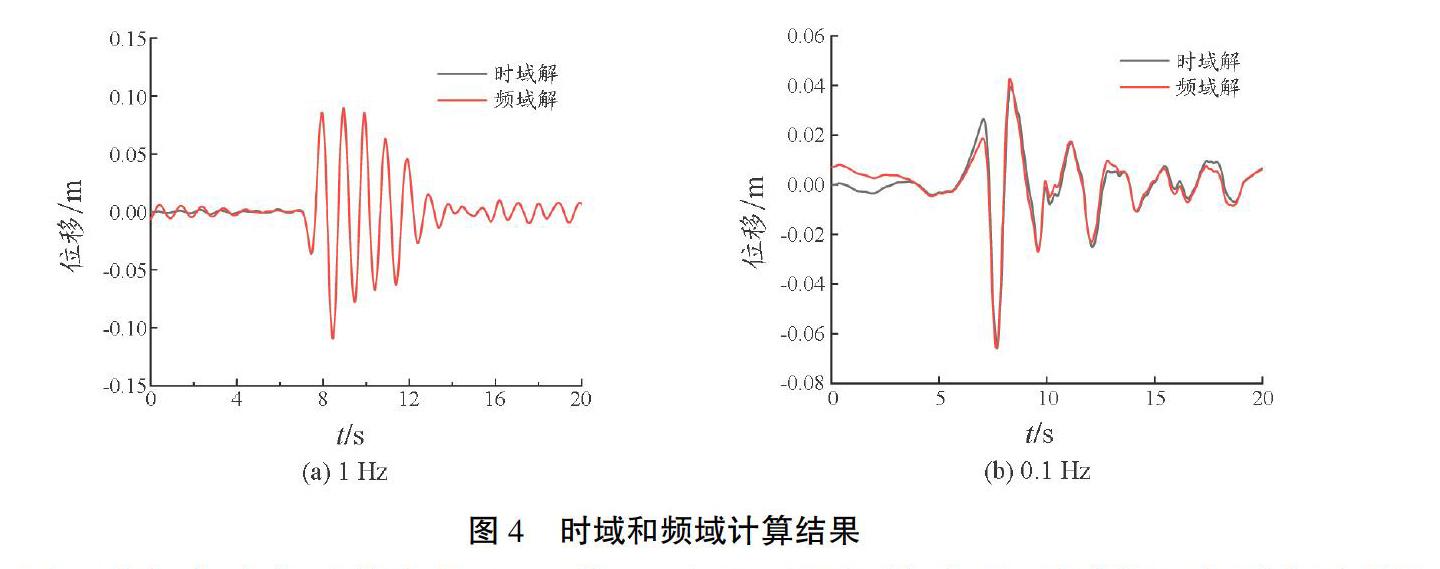
图3所示天津波为1976年11月25日在天津医院台站所采集的地震波,地震波的采样时间间隔为0.01 s,计算时长为20.48 s。已知体系的阻尼比ζ=0.05,初始速度和初始位移为零,则天津波地震输入作用下自振频率分别为1 Hz和0.1 Hz体系的时域解和频域解如图4所示。
由图4可知,自振频率相对较高的1 Hz体系,在地震的初始阶段,时域解和频域解有明显的差别,但6 s后,时域解和频域解基本重合;而自振频率很低的0.1 Hz体系,在整个地震持时范围内,时域解和频域解都有明显差别。为分析自振频率导致时域解和频域解差别的原因,将地震作用的等效荷载f(t)=-mu¨g(t)进行离散Fourier变换,即
f(t)=N/2j=0ajcosθjt+N/2-1j=1bjsinθjt(32)
式中:N为时间的等分点数,θj=2πj/NΔts (j=0, 1, 2,…, N/2),Δts是采样时间间隔,tn=nΔts (n=0,1,2,…,N-1),
a0=1NN-1n=0f(tn),aN/2=1NN-1n=0f(tn)cos(θN/2tn)。
当j=1,2,…,N/2-1时,
aj=2NN-1n=0f(tn)cos(θjtn),bj=2NN-1n=0f(tn)sin(θjtn)。
对于每项简谐荷载,时域解都包括伴生自由振动和稳态振动,而频域解仅有稳态振动。即体系的时域解为
u(t)=-e-ζωtN/2j=0(Acjsinωdt+Bcjcosωdt)-
e-ζωtN/2-1j=1(Asjsinωdt+Bsjcosωdt)+
N/2j=0(Ccjsinθjt+Dcjcosθjt)+
N/2-1j=1(Csjsinθjt+Dsjcosθjt)(33)
体系的频域解为
u(t)=N/2j=0(Ccjsinθjt+Dcjcosθjt)+N/2-1j=1(Csjsinθjt+Dsjcosθjt)(34)
式中:
Acj=ζωDcj+θjCcjωd,Bcj=Dcj,
Asj=ζωDsj+θjCsjωd,Bsj=Dsj,
Ccj=ajk2ζvj(1-v2j)2+(2ζvj)2,
Dcj=ajk1-v2j(1-v2j)2+(2ζvj)2,
Csj=bjk1-v2j(1-v2j)2+(2ζvj)2,
Dsj=bjk-2ζvj(1-v2j)2+(2ζvj)2。
式(33)右边的第一和第二项为不同激振频率伴生自由振动引起的瞬态振动,式(34)频域解中没有伴生自由振动而只有稳态振动。由于瞬态振动是以e-ζωt衰减,当阻尼比一定时,瞬态振动衰减与体系的自振频率有关,自振频率越高,衰减越快。因此,1 Hz体系经过6个自振周期后的瞬态振动和稳态振动相比可以忽略不计。而0.1 Hz体系在20 s的时间内仅为2个自振周期,对于阻尼比为0.05的体系,瞬态振动仅衰减了0.47,整个振动持时内时域分析和频域分析都有明显差别。因此,对于长周期体系,由频域分析得到体系的稳态解,可能低估结构的反应。
四、滞后阻尼体系的频响函数
式(7)中的粘滞阻尼体系,阻尼力与速度成正比,具有计算简便的特点而得到广泛应用。粘滞阻尼的耗能与频率相关,但很多材料的耗能与频率无关,此时采用阻尼力与位移成正比、相位差π/2的滞后阻尼模型更符合实验结果[5]。
fd=-iηku(35)
式中: fd为阻尼力,i=-1为纯虚数,k为刚度系数,η为滞后阻尼系数。在任意荷载f(t)作用下,滞后阻尼体系的运动方程为[13]
mu¨+k(1+iη)u=f(t)(36)
式中:u为复位移反应,u¨为复加速度反应。令f(t)=eiθt,所得体系的反应即为体系的频响函数
H(θ)=1-θ2m+k(1+iη)(37)
显然,式(37)是关于θ的偶函数,即
H(θ)=H(-θ)(38)
式(38)表明负频率和正频率的频响函数是不共轭的。由于荷载的Fourier变换会出现数学上的负频率。为使位移频域解Fourier逆变化后的时域解实部正确,正负激振频率下的频响函数应为共轭复数。因此,为确保滞后阻尼体系频域解的正确性,应将式(37)的频响函数[14]更改为
H(θ)=1-θ2m+k(1+isgn(θ)η)(39)
式中:sgn为符号函数,当θ>0时,sgn(θ)=1;当θ<0时,sgn(θ)=-1。下面以f(t)=cosθ1t(θ1>0)为例,讨论式(39)的必要性。已知cosθ1t的广义Fourier变换为
∫+∞-∞cosθ1t·e-iθtdt=πδ(θ+θ1)+δ(θ-θ1) (40)
若以式(37)为频响函数,则体系的位移解为
u=121-θ21m+(1+iη)keiθ1t+121-θ21m+(1+iη)ke-iθ1t=cosθ1t-θ21m+(1+iη)k(41)
若以式(39)为频响函数,则体系的位移解为
u=121-θ21m+(1+iη)keiθ1t+121-θ21m+(1-iη)ke-iθ1t=(k-θ21m)cosθ1t+ηksinθ1t(k-θ21m)2+(ηk)2(42)
对于复系数的微分方程,f(t)=cosθ1t下方程的解等于f(t)=eiθ1t下方程解的实部[15]。在f(t)=eiθ1t下方程的复反应为
u=1-θ21m+(1+iη)keiθ1t(43)
显然,式(42)和式(43)的实部相等,而式(41)并不等于式(43)的实部,因此,对滞后阻尼体系进行频域分析时,应在滞后阻尼中考虑激振频率符号的影响,以使负频率和正频率的频响函数互为共轭复数。
五、结语
1)动力学和静力学刚度系数从原理上是相同的。对于忽略质量转动惯量的集中质量模型,动力学刚度系数是指平动自由度产生单位位移而转动自由度放松下所受的力。动力学刚度系数也可直接利用静力学刚度矩阵,采用静力凝聚的方法计算。在动力学中,转动自由度并非独立变量,利用静力凝聚方法可由平动自由度反应时程计算转动自由度反应时程。
2)无论是无阻尼体系还是有阻尼体系,频响函数是脉冲响应函数的Fourier变化都精确成立。时域特解包含稳态振动和伴生自由振动,而频域特解仅为体系的稳态解,两者之间的差别主要在振动的初始阶段,自振频率越低,瞬态振动的持续时间越长,此时频域解在较长的时程内存在误差。
3)對于滞后阻尼体系,在进行频域分析时,频响函数应在滞后阻尼中考虑激振频率符号的影响,以使负频率和正频率的频响函数互为共轭复数。参考文献:
[1]
陈清军,李文婷.结构动力学课程多元化教学方法探讨[J].高等建筑教育,2015,24(2):47-52.
[2]鲁正,翁渝峰.中外土木工程防灾专业结构动力学课程比较研究[J].高等建筑教育,2018,27(4):13-17.
[3]潘旦光,丁民涛. 结构力学抽象理论实物化教学方法研究[J].高等建筑教育,2018,27(2):57-60.
[4]龙驭球,包世华,袁驷. 结构力学(I)[M]. 4版.北京:高等教育出版社,2018.
[5]Chopra A K. Dynamics of Structures: Theory and Applications to Earthquake Engineering[M].New Jersey: Englewood Cliffs, Prentice-Hall, 1995.
[6]Cammarata A, Sinatra R, MADDO P D. Static condensation method for the reduced dynamic modeling of mechanisms and structures[J]. Archive of Applied Mechanics, 2019, 89(10):2033-2051.
[7]R.克拉夫,J.彭津.结构动力学[M].王光远,译. 北京:高等教育出版社,2006.
[8]俞载道.结构动力学基础[M].上海:同济大学出版社,1987.
[9]Zhou L, Su Y S. Cyclic loading test on beam-to-column connections connecting SRRAC beams to RACFST columns [J]. International Journal of Civil Engineering,2018, 16(11): 1533–1548.
[10]Sheng M P, Guo Z W, Qin Q, et al. Vibration characteristics of a sandwich plate with viscoelastic periodic cores [J]. Composite Structures,2018, 206: 54–69.
[11]潘旦光.结构力学(下)[M].北京:清华大学出版社,2016.
[12]桂子鹏,康盛亮.数学物理方程[M].上海:同济大学出版社,1987.
[13]Ribeiro A M R, Maia N, Silva J M. Free and forced vibrations with viscous and hysteretic damping: a different perspective[C]//Proc. MZD-5th Int. Conf. Mechanics and Materials in Design, 2006.
[14]Chen J T, You D W. An integral-differential equation approach for the free vibration of a SDOF system with hysteretic damping [J]. Advances in Engineering Software, 1999, 30(1): 43-48.
[15]何钟怡. 复本构理论中的对偶原则[J]. 固体力学学报,1994(2):177-180.
Analysis of several problems in structural dynamics
PAN Danguanga,b,LU Wenyana
(a.Department of Civil Engineering; b.Beijing Key Laboratory of Urban Underground
Space Engineering, University of Science and Technology
Beijing, Beijing 100083,P. R. China)
Abstract:
To discuss several problems in the process of establishing and solving equations of motion in structural dynamics teaching. It mainly includes the difference of stiffness coefficients between dynamic and static mechanics as well as their relationship by the static condensation, the Fourier transformation condition from impulse response function to frequency response function and their effect on dynamic response, the frequency response function of the hysteretic damping system. For the lumped-mass system with only translational degree of freedom, the stiffness in dynamics is the force required along DOF due to unit displacement at translational DOF and relaxation of rotational DOFs, and the stiffness coefficients obtained by the static condensation method and the unit displacement method are identical; Whether a system with damping or not, the Fourier transformation relationship between the frequency response function and the impulse response function is accurate; the particular solution includes steady-state vibration and free adjoint vibration in the time domain, however, only the steady-state vibration in the frequency domain. Their difference is evident for the initial stage of vibration. The difference is more noticeable for small natural frequency. For a system with hysteretic damping, the frequency response function of the negative frequency should be the conjugate function of that of the corresponding positive frequency.
Key words:
stiffness coefficients; static condensation; time domain method; frequency domain method; hysteretic damping
(責任编辑 周 沫)