基于定向扰动混合粒子群优化的筒盖故障诊断技术
2021-07-06 13:56吉大海芮光超张维义
舰船科学技术 2021年6期
吉大海,芮光超,张维义
(1.中国人民解放军91550 部队,辽宁 大连 116000;2.郑州机电工程研究所,河南 郑州 450015)
0 引 言
筒盖系统是潜艇导弹发射系统的重要组成部分。若是无法及时诊断并处理筒盖系统发生的故障,将会对人员、潜艇和海洋环境造成威胁。筒盖故障诊断系统能够提前发现筒盖系统的故障,降低严重事故发生的概率。因此筒盖的故障诊断系统的构建必不可缺。筒盖在运作过程中会产生很多不同的信号,其中振动信号是诊断故障的重要特征来源。本文利用故障诊断的相应方法,采集包括振动信号在内的多项特征,搭建筒盖的故障诊断系统。
随着信息技术的进步,故障诊断的方法也在一步步地发展,但基本流程却基本相似。首先是信号采集,在线检测设备状态特征的信息。接着是对检测到的原始信号使用数据处理方法将其转换成相应的特征量。然后是从特征量中分辨正常或者异常的状态。最后是根据获得的信息,准确判断出设备当前的状态是否正常。
1 本文解决方案
1.1 方案概述
在本文中,将筒盖的振动信号作为故障诊断特征,并以此特征反应出筒盖设备的相应状态,建立筒盖故障诊断系统。同时,按照分层评估、系统定位的方法,利用历史数据进行模型优化,利用实时在线数据进行筒盖的故障诊断。满足状态监测和故障诊断的要求,其基本过程如图1 所示。
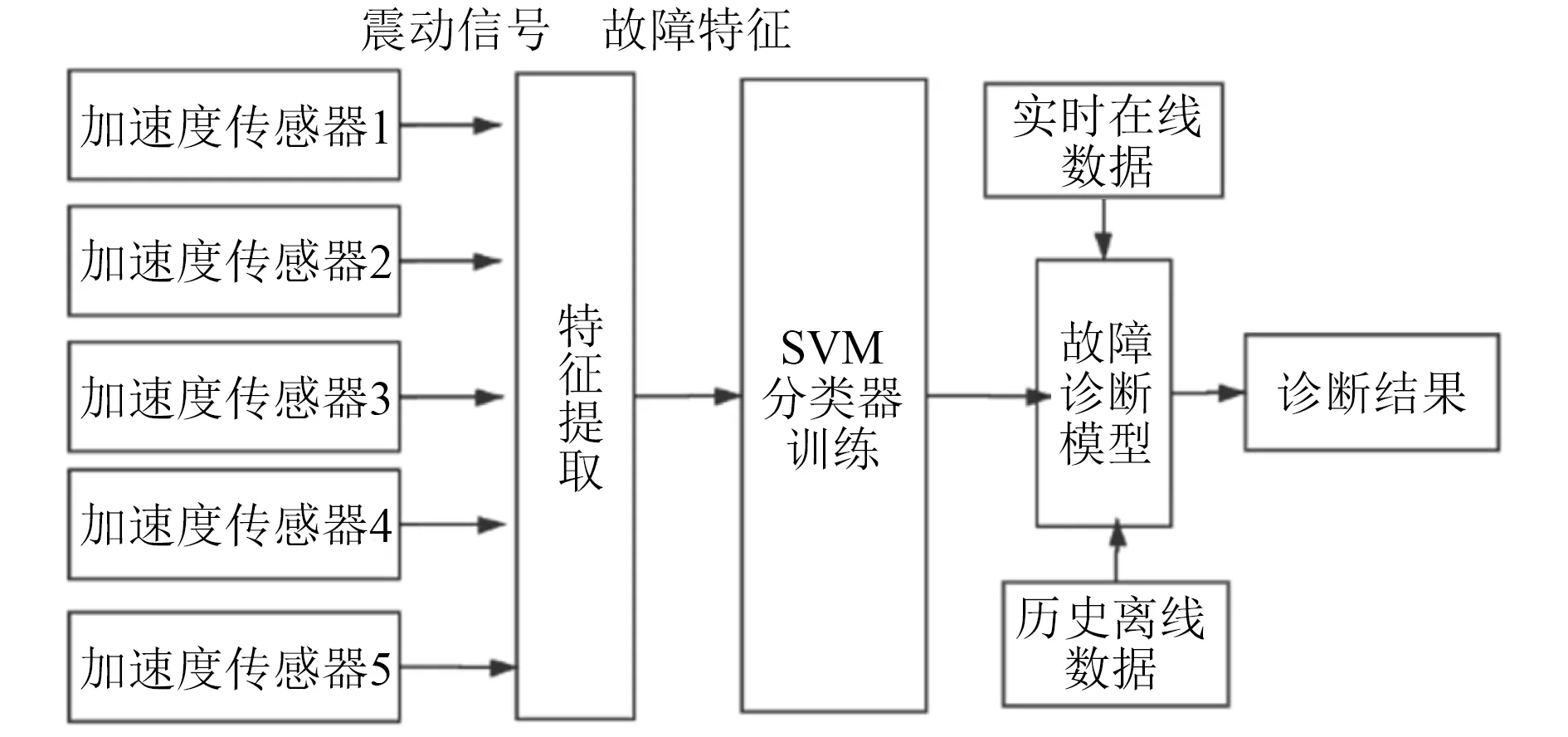
图1 筒盖系统故障诊断基本过程Fig.1 The basic process of fault diagnosis of cylinder cover system
1.2 特征提取方法
如图1 所示的筒盖系统,多加速度传感器采集的运行参数代表着与相对应故障的映射关系,并以此为基础实现故障诊断系统。同时,有关部件的状态也与筒盖运行过程中出现的振动信息有着联系,可以用来监测和诊断筒盖机械部件的运行状态。
1.2.1 基于特征频带能量值输入的故障特征提取
筒盖运动的冲击过程是非平稳的,在频域内它的能量呈现宽频带分布,因此振动信号的特征可以有相应频带的能量信息进行表示。筒盖与基座间通过8 个大型螺栓连接,当螺栓出现断裂或松动时,其产生的振动信号与正常状态相比会产生差异。因此,可以在筒盖基座的螺栓附近安装压电加速度传感器。
为了获取相应频带的能量值数据,需要分别在正常与螺丝松动的状态下采集相应的振动信号,并计算时域最大峰值、公共率在内的多个能量值,进行综合对比。
1.2.2 基于小波降噪及区间小波包分解的故障特征提取
小波变换通过变换就能让信号的某些特征变得易于处理,非常适用于探测筒盖的震动信号。小波包分解可以划分信号,让它们处于不同的频带里。设备的运行状态就可以利用这些信号的不同的能量表示进行分辨和表示。为了诊断螺栓松动故障,将筒盖振动信号利用小波包分解进行故障信息提取,同时利用参数平均法来提高特征向量的准确性。
试验研究表明,小波包分解方法将整个频率区间平分,分解了一些不重要或是无关的成分区间,而对影响结果好坏的成分之间的信号无法细致分解。
不同的筒盖振动信号的频率分布在不同的区域,因此为了进行细致的特征提取,需要使用到基于区间的小波包分解方法。
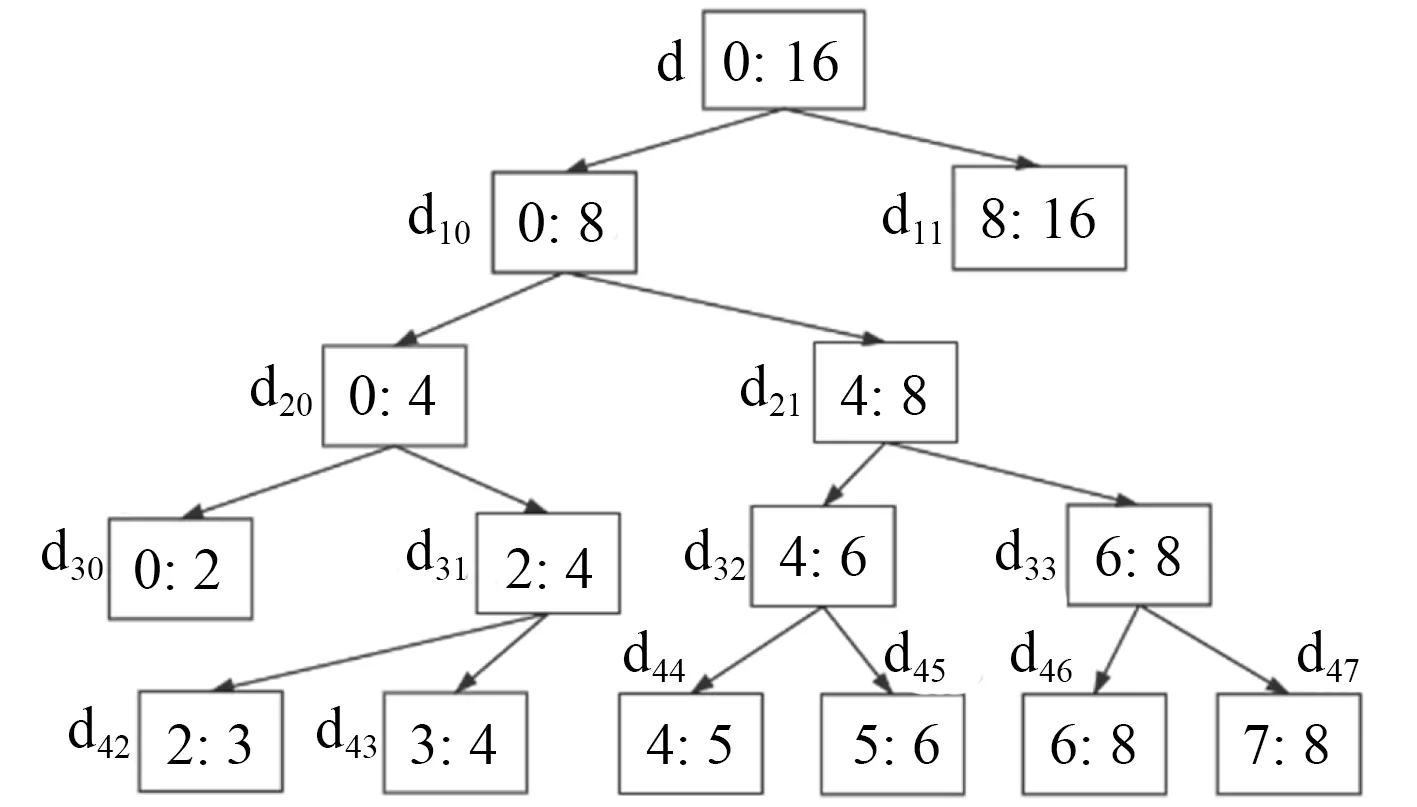
图2 基于区间的小波包分解(单位:KHz)Fig.2 Wavelet packet decomposition based on interval (unit:KHz)
筒盖振动信号经4 层分解后得到图3 中更为细致的8 个信号,能够明显地显示出不同振动信号的区别。
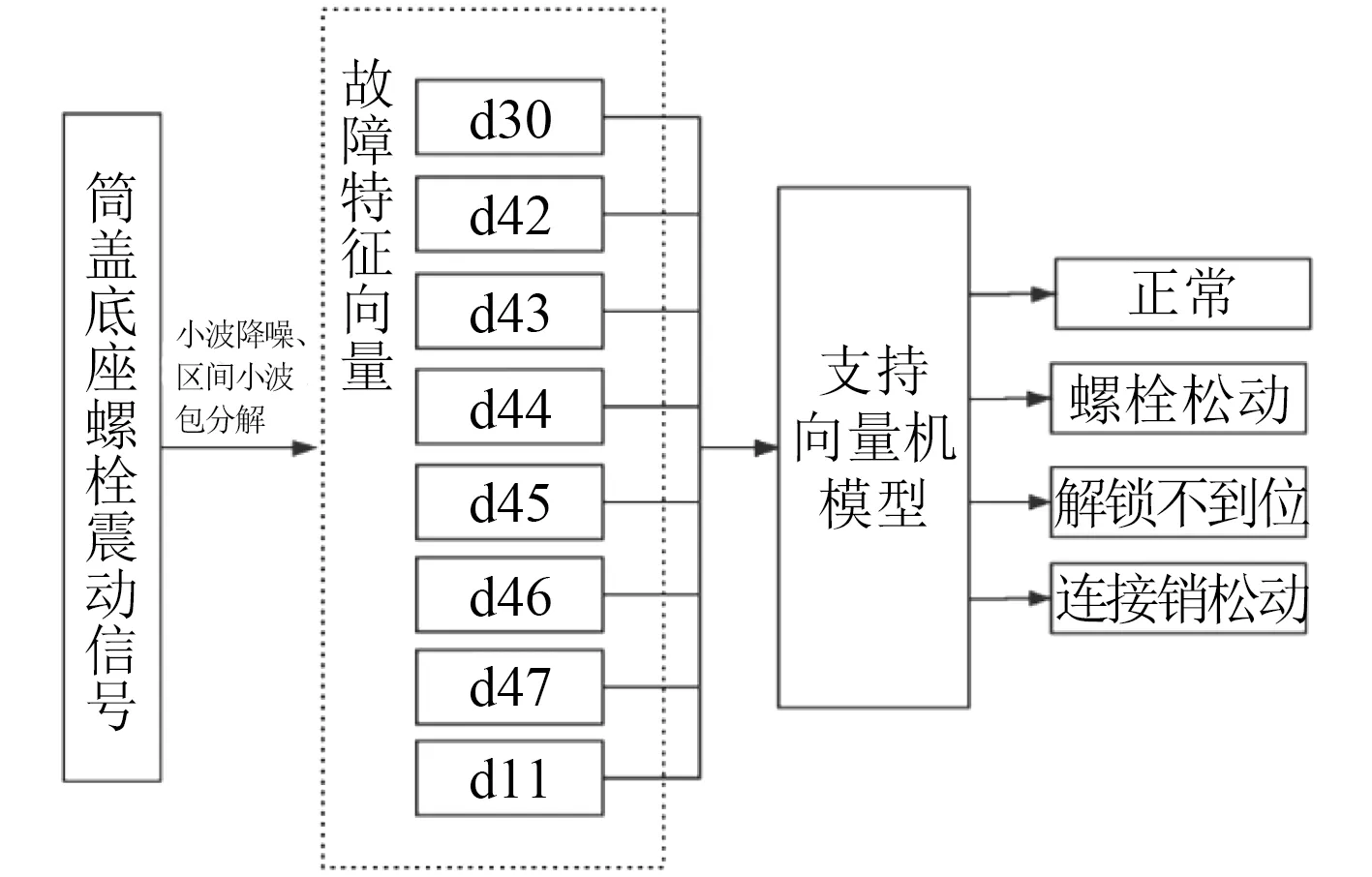
图3 基于区间小波包分解的筒盖系统故障诊断Fig.3 Fault diagnosis of cylinder cover system based on interval wavelet packet decomposition
筒盖故障的诊断一个较大的困难就来源于振动信号的大量噪声。信号中的突变或尖峰在小波变换面前无所遁形。因此其有很好的降噪效果。因此这里采用小波变换进行降噪。
1.2.3 基于筒盖系统运行状态参数的故障特征提取
对于复杂而又精密的筒盖系统来说,应考虑尽量多的可能影响筒盖故障状态的运行信号,通多这些信号检测筒盖系统更多的状态特征,是该故障诊断系统的判断更有说服力。
研究发现,针对筒盖系统不同的运行状态,筒盖系统的液压流量L(L/min)、压力P(kPa)、液压油温度T(℃)和液压杆位移S(mm)有不同的特征,正好符合我们的要求,因此将上述的诸多特征联合起来使用在本系统上。
1.3 诊断模型构建
整个故障诊断系统的构建过程中,关键问题之一就是如何建立一个最有的数学模型,使得故障特征向量和故障状态建立映射关系。泛化性能是问题的一个解决方法,支持向量机正适合建立这模型。
粒子群优化算法(PSO 算法)在支持向量机参数优化领域已经被普遍使用,同时,故障检测时也常常会使用到。HPSOP-PDT 算法在继承PSO 原有特性的前提上,改进了PSO 算法极易陷入局部最优的问题。为了达到更好的效果,可采取如下步骤进行分步优化:
1)用HPSOP-PDT 算法对CV_RBF_OVO 函数进行优化,选择最佳模型参数。
2)以正交表为基准,选取多个交叉验证优化函数,实施SVM 的结构和参数的优化。
在建模时,可以先实施步骤1,若交叉验证结果不理想,再实施步骤2。
面对不同的问题时,需要调整相对应的支持向量机的模型结构和参数。为了获得最佳的模型结构和参数,需要使用正确的选择方法,还要考虑其模型评价指标。
K 折交叉验证是常用于机器学习模型调优的方法,它会将原本的训练数据分为k份,每次取其中一份作为验证集,其他为训练集。总共进行k次实验,在所有测试结束之后,计算所有测试之后测试准确率的平均值,将其作为性能评价的结果。
2 实验过程
本次试验中分别针对基于特征频带能量值输入、小波降噪及区间小波包分解、筒盖系统运行状态参数的不同故障特征进行了试验,根据筒盖基座的振动信号分别提取故障特征,并利用预设模型结构的支持向量机和优化模型结构的支持向量机构建了故障诊断模型,验证故障诊断能力。
数据量过大将会导致支持向量机的结果出现较大的偏差,因此需将原始数据集归一化。首先将训练子集归一化,然后按相同的方法对测试子集归一化。
设数据集的某个特征量为X,将其划分为训练子集Xtr和 测试子集Xte,Xtr的 最大值为Xtrmax、最小值为Xtrmin,则Xtr的归一化数据为

而Xte的归一化数据为

2.1 基于特征频带能量值输入的故障诊断
为了监测筒盖的运动状态,可以提取筒盖基座振动信号,并计算相应的能够反映筒盖运动状态的特征向量。
首先,进行数据的划分和归一化,根据训练子集,使用HPSO-PDT 算法对CV_RBF_OVO 函数进行优化,得到的模型参数为:[C,γ]=[23.87,21.58]。取k等于10,进行交叉验证之后,可以得到结果为100%。同时,支持向量机对训练子集和测试子集的结果都达到100%。交叉验证方法保障了模型的泛化性,此支持向量机从分类结果和从鲁棒性来看均满足要求,没有必要再进行模型结构优化。
2.2 基于小波降噪及区间小波包分解的故障诊断
为了对相应故障进行诊断,对筒盖系统的四种状态(1-正常、2-螺栓松动、3-解锁不到位、4-连接销松动)分别获取20 组振动信号。对信号进行降噪处理,再提取特征向量,最后进行归一化处理,得到相应的数据集。
经过数据集的划分和归一化处理以及函数的优化之后,[C,γ]=[29.25,2-2.16]为最后得到的结果。取k等于10,进行交叉验证,得到结果为93.26%。支持向量机对训练和测试子集的正分率分别为100%和95.17%。从数据上看,虽然预测结果还不错,但是该支持向量机还能变得更好。
2.3 基于筒盖系统运行状态参数的故障诊断
通过信号采集系统采集液压流量L(L/min)、压力P(kPa)、液压油温度T(℃)和液压杆位移S(mm)作为故障特征向量,在筒盖不同的运行状态下(1-正常、2-油压过低、3-油温过高、4-行程过短)分别采集运行参数。进行数据的划分和归一化,得到相应的数据。由于数据量大,仅列出表1 部分数据。
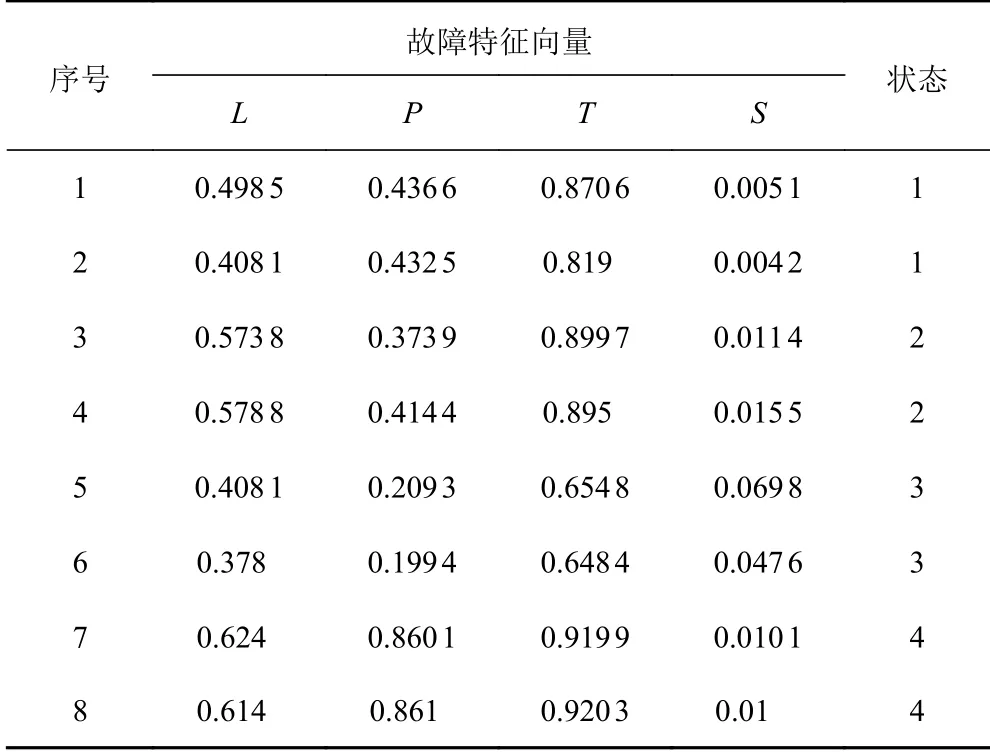
表1 筒盖系统状态归一化数据(部分)Tab.1 Normalized data of cylinder cover system state (partial)
使用同样的方法得到最优的模型参数为:[C,γ]=[212.4,27.32],取k等于10,进行交叉验证之后,可以得到结果为100%。支持向量机对训练和测试子集的正分率分别为100%和93.47%。分类效果理想,但还可以更进一步提高准确率。
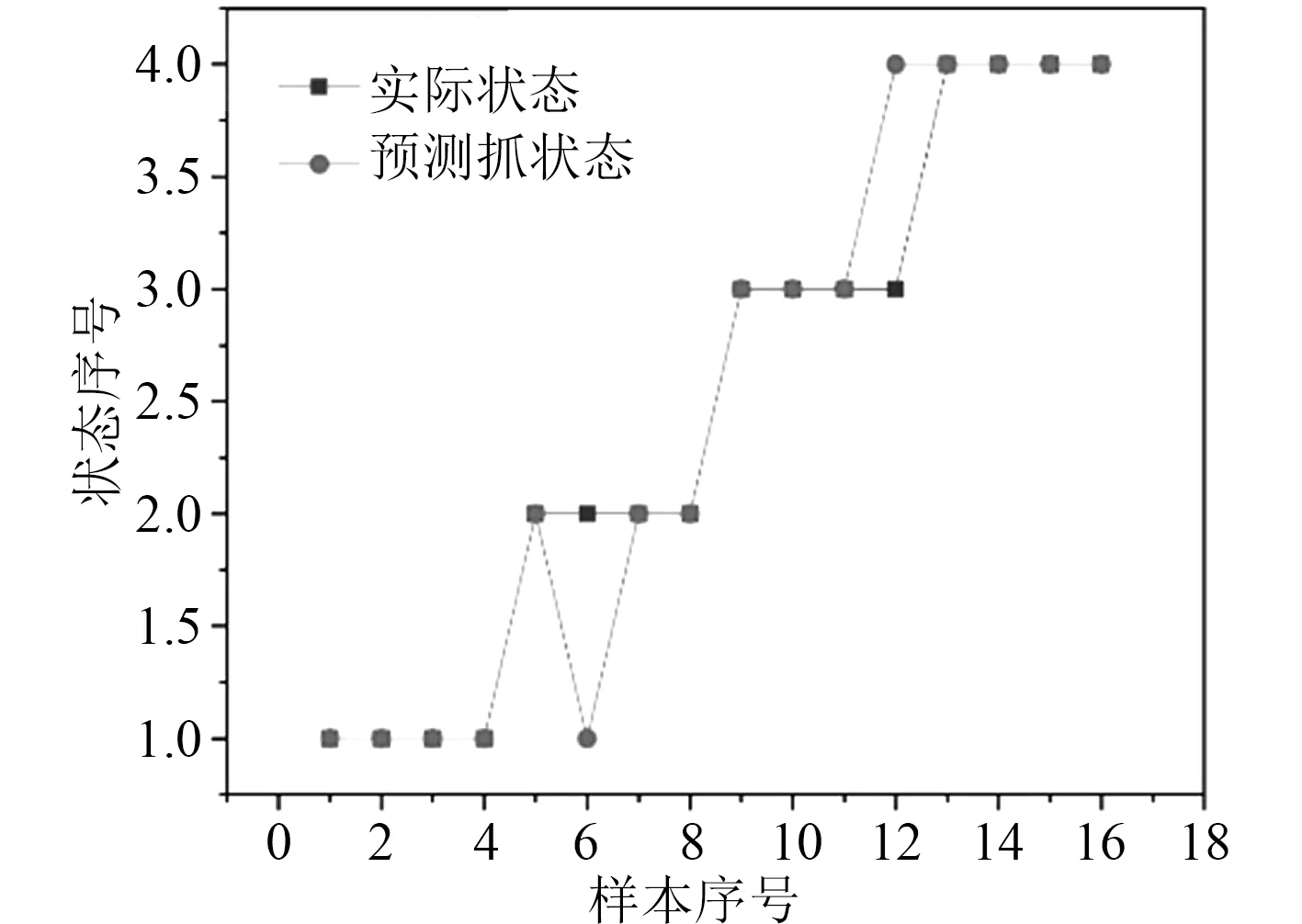
图4 测试机预测曲线(部分)Fig.4 Test machine prediction curve (partial)
3 结 语
本报告依据筒盖系统的故障诊断需求,开展了系统架构论证和具体的方案设计,进行了原理性试验。
对于筒盖系统,通过筒盖基座的振动信号可以观察到不同运行状态的差异,同时以振动数据为基础,借助时频域方法可以有效提取故障特征,建立筒盖系统故障特征向量。最后,以筒盖系统故障特征向量和故障现象为输入,训练出筒盖系统故障诊断模型,并通过交叉验证证明了模型的准确性。
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年9期)2022-05-20
建材发展导向(2022年3期)2022-04-19
天天爱科学(2020年6期)2020-09-10
领导文萃(2019年8期)2019-04-19
读友·少年文学(清雅版)(2018年12期)2018-04-04
中学生数理化·八年级物理人教版(2014年2期)2014-04-02
数字家庭(2009年3期)2009-06-23
中学生数理化·高二版(2008年9期)2008-06-17