基于空地激光点云的隧道滑坡应急监测
2021-07-05 09:38李俊峰
地理空间信息 2021年6期
李俊峰,汪 璐,邓 非,陈 屹,程 前
(1.宁波市测绘设计研究院,浙江 宁波 315042;2.宁波市阿拉图数字科技有限公司,浙江 宁波 315042;3.武汉大学,湖北 武汉 430072)
2019第9 号台风“利奇马”在浙东沿海登陆,给宁波带来了严重影响,市内多地发生内涝、地质滑坡、泥石流等严重灾害。为迅速了解灾情,在宁波市自然资源和规划局的领导下,宁波市测绘设计研究院充分发挥专业优势,迅速派出车载移动测量组,赶赴鄞州角洞岙隧道受灾点,开展灾后应急测绘监测作业。对角洞岙隧道(如图1所示)进行滑坡监测,即运用三维激光扫描技术获取滑坡点三维点云数据,监测滑坡点形态,并与2015年我院就通过直升机获取的机载激光点云做比对,估算滑坡方量。并迅速上报市局指挥组,为相关区域灾后救援、灾后重建提供了精确的监测数据,同时,可记录滑坡对隧道和洞口的挤压变形的原始数据,作为日后检测或维护的依据,并为日后地质灾害监测积累了宝贵的第一手测绘资料。

图1 角洞岙灾害现场图
1 数据采集设备
角洞岙隧道滑坡监测采用的是世界上最大的激光扫描仪生产厂家——奥地利RIEGL公司生产的RIEGL VZ-400三维激光扫描仪(如图2所示),其主要参数如表1所示。

表1 RIEGL VZ-400三维激光扫描仪主要参数

图2 RIEGL VZ-400三维激光扫描仪
三维激光扫描测量的方法就是大面积高分辨率地快速获取被测对象表面的三维坐标数据。地面三维激光扫描和全站仪的测量原理相同,都是以仪器中心为坐标原点,通过测角和测距获取地面目标相对于坐标原点的三维坐标。不同的是地面三维激光扫描技术采用全自动高密度的面数据获取方式,它不仅获得点云的三维空间信息,同时获得地物目标的反射强度信息,从而实现对地物表面信息的高密度数据采集。主要特点如下:
1)使用简单、扫描快速、操作安全、应用范围广泛。
2)数据非常详细,点云影像清晰,高程可分层设色。
3)精确高速的数据捕获,减少数据采集和分析的回转次数。
4)对扫描区域进行的远程、高速扫描,使效率最大化。
5)一次扫描后可以在点云模型上进行反复的“模型测绘”。
2 外业数据采集
1)首先踏勘测区,结合实际,选择合理的控制点。(选点需注意:第一,选点时确保两点之间尽可能通视,有一定的重叠区域;第二,选择地理位置较高视野广阔的点,这样获取的数据也就越多)本次重点测量范围内所选 3 个控制点。
2)数据获取。架设三脚架,对中整平扫描仪,量取并记录仪器高,打开内置 GPS 实时定位,连接笔记本电脑操控扫描;此次滑坡共扫描 3 站,平均每站扫描用时为 5 min扫描视场角为全景360°×100°扫描,扫描半径为超长距离 350 m,点云在滑坡处的分辨率为2 cm 且排列整齐,满足监测需求。
3)待每站扫描结束后,利用 GPS-TK 获取每一个控制点的三维绝对坐标值。
3 内业数据处理
1)激光点云拼接。激光点云拼接的过程,实质是将点云的坐标系统由扫描仪自身坐标系转换为绝对坐标系。由于RIEGL VZ-400每一次扫描的数据都是使用其自身所设定的扫描仪坐标系统SOCS,所以需要利用每一站的后视靶标来将点云坐标转换为绝对坐标,相当于空间后方交会,从而将所有点云均置于统一的地理坐标系下,拼接采用的是RIEGL自带的处理软件RISCAN PRO。拼接完成后采用软件自带的MSA平差模块对点云数据进行整体平差,拼接后的滑坡区域点云如图3所示。
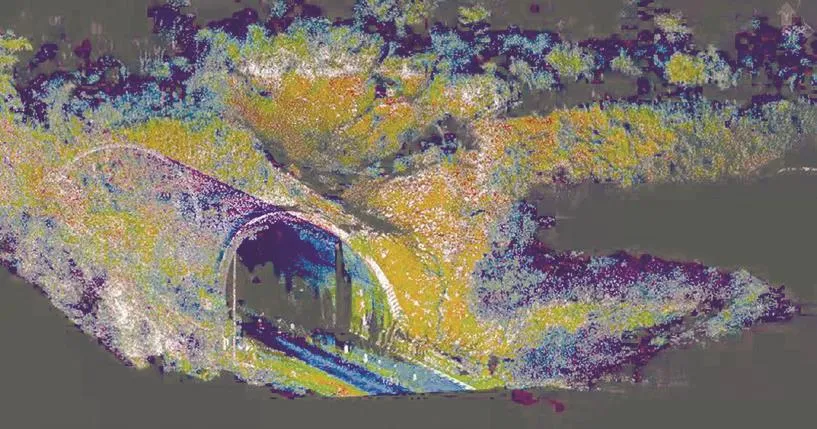
图3 拼接后的滑坡区域点云
2)点云裁切、噪声剔除。在点云数据获取过程中,因为采用的是360°全方位扫描,所以不可避免地产生了较多冗余数据以及由其他原因产生的噪声数据等,因而需要对点云数据进行裁切并剔除噪声点。将激光扫描数据逐站导入处理软件,通过软件的矩形、多边形选择点云等功能选中冗余及噪声数据。
3)点云滤波。为了得到真实的地表数据,需要进行点云的地表点和非地表点分离删除,也即点云数据的滤波。在创建一个光栅矩阵模型并覆盖整个测区后,根据栅格网设置密度的节点寻找到该有效节点Z值最低的点数据,通过这点再建立一个粗略的地形模型,用于分离地表及非地表点,地面点云如图4所示。
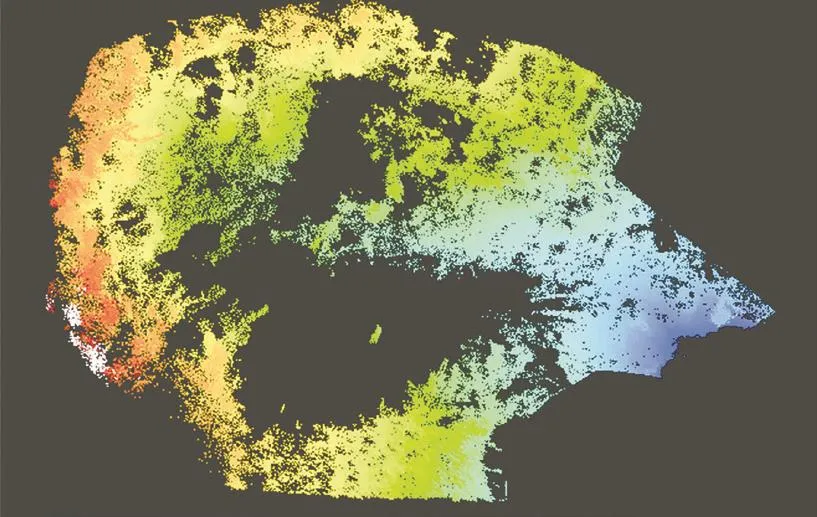
图4 滤除地表附着物后的地面激光点云
4)将2015年通过直升机载体扫描获取的机载点云与本次地面扫描获取的点云数据叠加,效果如图5所示,其中,红色区域为机载点云,白色为地面激光点云,二者之间的空洞区域即为滑坡。
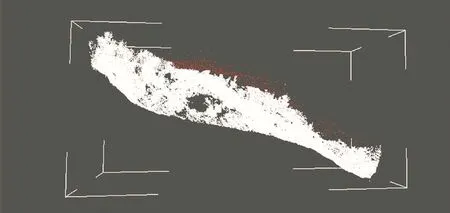
图5 机载与地面点云叠加显示效果
5)以两者最低面下移1 m为方量计算基准面,基于机载点云计算得到方量为2 444.590 m3,并创建边坡三维模型(如图6所示)。
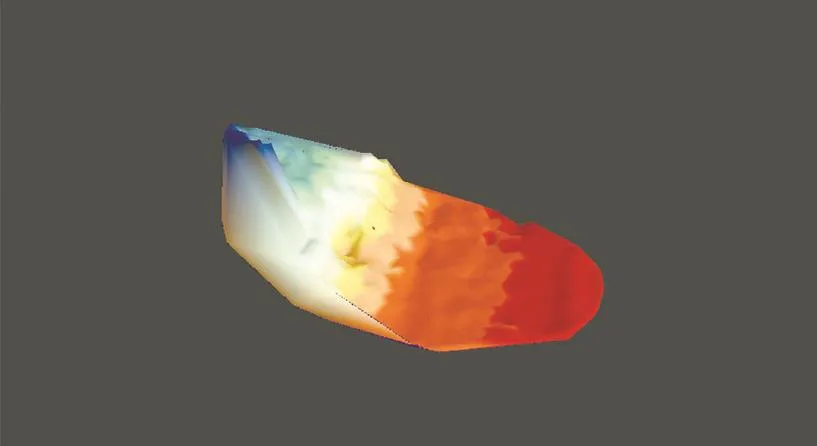
图6 基于机载点云的三维模型
6)保持方量计算基准面不变的情况下,基于地面点云计算得到的方量为5 284.953,并创建边坡三维模型(如图7所示)。
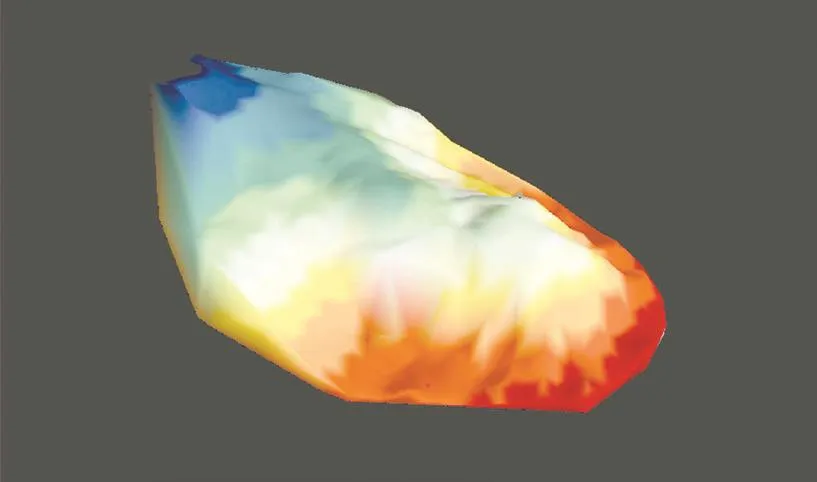
图7 基于地面点云的三维模型
7)将二者方量求差即可得到滑坡量为:2 840.363 m3。
4 监测分析
外业采集时间:外业数据采集共计用时 1h。
内业数据处理:用时3h。
综合比较:采用 Riegl VZ-400 静态三维激光扫描仪测量滑坡,从外业数据采集到内业数据处理及成果输出都比传统测绘方法高效。
优点一:数据采集时间短
传统基于点采集的测绘方法需要投入大量的人力资源用于滑坡测绘,外业数据采集过程较长,从而延长了下一步救灾计划的实施,很可能会再次发生灾害,造成更大的经济损失及人员伤亡。激光扫描仪的应用有效的节省了大量的人力、物力、财力的投入,大大缩短了外业工作时间,节省了项目经费的支出,而且高精度的测绘能给灾害应急提供更加准确的数据成果。
优点二:内业数据处理快
强大的后处理软件能快速完成数据拼接、植被剔除、等高线生成、DEM 成图等。在紧迫的救灾时间内,为救灾工程队提供高精度的数据成果,制定出一系列救灾应急方案。
5 结 语
针对本次台风应急测绘总结经验如下:
1)采用机载激光雷达采集并制作覆盖全市域的高精度地表模型。
2)采用地面激光扫描仪快速获取灾害点的高精度地表模型,结合机载点云成果即可快速估算滑坡量。
3)建议在全市范围内选取地质灾害隐患点,利用三维激光雷达扫描仪获取滑坡灾害现场的绝对坐标值点云数据,通过点云后处理软件制作三维滑坡模拟实验模型数据,进而对灾害现场范围内还未发生滑坡的山体进行坡模拟实验,这样一旦发生滑坡,可第一时间提供第一手资料,便于及时开展救援抢修工作。
猜你喜欢
河北地质(2021年1期)2021-07-21
西部交通科技(2021年9期)2021-01-11
模具制造(2019年3期)2019-06-06
智能建筑与智慧城市(2018年11期)2018-11-28
中国资源综合利用(2017年2期)2018-01-22
北方交通(2016年12期)2017-01-15
水利科技与经济(2016年6期)2016-04-22
中国房地产业(2016年2期)2016-03-01
山东青年(2016年3期)2016-02-28
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27