
三轴体感云台VR交互控制系统
2021-07-02 12:22程杰王俊博王鉴威孙婷唐海莉韩瑜满朝阳
电子测试 2021年11期
程杰,王俊博,王鉴威,孙婷,唐海莉,韩瑜,满朝阳
(北京信息科技大学,北京,100192)
0 引言
目前,市场上销售较广的云台为两轴云台,已满足固定摄像设备、扩大监控范围的功能。但随着图像采集需求日渐多样化,普通两轴云台的缺点也逐渐显露:延迟时间过长、画面抖动较大,无法达到体感控制与人机交互等热点需求的标准。本系统采用的三轴机械云台能根据云台姿态实时调整补偿,消除画面抖动,相较传统技术大大提升画面观感,足以支持搭载平台进行高难度动作而采集到的图像清晰[1]。
本系统由三大模块组成:包括陀螺仪、单片机、云台在内的数据采集与处理模块;无线传输模块;包括摄像头、双目VR眼镜在内的图像采集与显示模块。
1 系统性能目标
本系统将传统的云台控制模式与体感控制结合,旨在实现及完善体感控制的功能,来达到人机交互的目的。通过陀螺仪采集VR眼镜的转动数据,将数据传输给云台联动机械结构,云台装载的摄像头获取图像并传回VR眼镜,实现实时控制。同时,增加复位按键,使摄像头初始化与人方向一致。
在已有传统技术的基础上,将角度分辨率(即指向精度)提高至0.01弧度(换算成角度即0.6度),那么就可以在一百米的距离处实现一米的分辨率;提高清晰度,实现7公里内清晰度达到1080p;降低延迟时间,使其控制在1s以内。
2 系统整体设计
本系统由数据采集与处理模块、无线传输模块、图像采集与显示模块组成,其中数据采集与处理模块由陀螺仪、单片机、云台组成;无线传输模块初步采用蓝牙模块实现,但不局限与蓝牙模块;图像采集与显示模块由摄像头实现图像采集功能,VR眼镜实现图像显示功能。
体验者佩戴VR眼镜,通过复位按键使摄像头方向与人体一致,随后体验者转动视角,陀螺仪采集转动数据,传输至单片机,经过无线传输,把转动数据传输至另一台单片机,单片机控制云台转动相应角度,加装在云台上的摄像头采集图像,经过图像传输模块传递回VR眼镜,可实现体验者与摄像头的人机交互。
3 子模块
3.1 数据采集与处理模块
VR眼镜经佩戴者转动进而产生三个方向的角度数据,本系统采用陀螺仪模块加装在VR眼镜上进行数据测量采集的方式,数据以高精度三轴姿态角度输出,即翻滚角、俯仰角、航向角。陀螺仪模块如图1所示。
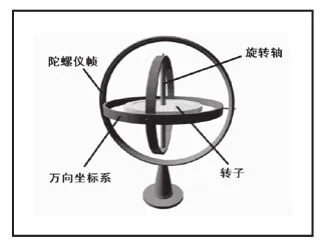
图1 陀螺仪模块
陀螺仪采集数据后,将数据传输至单片机,单片机通过数据处理、无线传输到云台所在 结构,云台根据所测得的三个方向的角度进行相应旋转,以达到人机交互的目的。为满足需要,本次设计所采用的云台系配备大扭矩
3.2 无线传输模块
本次设计的VR交互系统需要在云台模块与VR眼镜模块之间具有一定距离的情况下实现视频信号与头部转动信号的实时传输与处理,于是,本设计需要使用到一款满足远距离情况下低延迟大带宽的信号传输模块[2]。
为此,本次设计的VR交互系统采用了TS835无线传输模块,该模块采用的是5.8G信号传输系统,可以满足该设备的设计需求使用。同时其工作速率可达4Mbps,可以满足视频与陀螺仪数据的传输要求。
为满足数据传输,本次设计的VR眼镜端搭载的陀螺仪将采集到的头部转动的角度信息传输到云台端的单片机中。
同时,VR交互系统在云台端产生的视频数据数据通过单片机进行初步的处理之后就会经过NRF24L01信号传输模块输入到VR眼镜端的单片机中,进而通过单片机实现对云台角度的控制。
最终便可以实现在超低延迟下,VR眼镜实时跟随头部转动方向并看到实时画面。
3.3 图像采集与显示模块
本次设计的VR交互系统的核心就在于将云台上搭载的摄像头拍摄的画面实时传输到VR眼镜的显示端中,最终被眼睛所采集。
为此,我们选择了高清运动相机一枚,并将其搭载到三轴云台上,其具有很好的视频防抖功能,通过与云台控制算法的配合,可以很好地防止图像在采集过程中出现的抖动,同时该相机为数据传输模块输出1080P的高清视频,可以通过图传传输到VR眼镜端。
头戴VR系统中的视频显示模块是由两个独立的显示屏和两套独立的目镜光学系统组成,每块屏幕的分辨率达到1280*960,视角范围是46°。采用OLED显示屏可以有更鲜艳的色彩和更高的对比度。摄像头捕获的视屏可以在快速的明暗对比之下拥有更大强大的细节,这样就大大增强了该VR云台交互设备的使用场景,尤其是在视频快速移动的场景中有着更强的应用能力。同时两套独立的光学系统分别服务于使用者的左眼和右眼,通过瞳距的调节可以满足大多数使用者的正常使用需求。其中+200(远视)至-600(近视)的屈光度调节范围可以让有视力障碍的使用者暂时的放下沉重的眼镜片。
下图便是VR眼镜中的目镜模块搭载的凸透镜,通过利用凸透镜的汇聚功能来实现VR眼镜将焦点汇于双目,以达到较强的沉浸感。
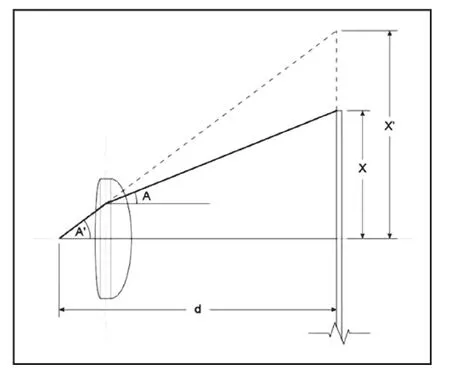
图2 VR眼镜中的目镜模块搭载的凸透镜
3.4 系统的程序设计
①定义串口及所要发送字符,并添加舵机控制函数;
②传送数据给匿名四轴上位机软件(包括8位功能字、8位数据缓存区、8位有效数据个数);
③系统复制数据,经过计算校验和,将数据发送到串口;
④发送数据为加速度传感器数据和陀螺仪数据:x,y,z三个方向上的加速度值及x,y,z三个方向上的陀螺仪值;
⑤通过串口上报结算后的姿态数据给电脑,即x,y,z三个方向的角度:横滚角、俯仰角、航向角;
⑥一系列初始化操作:串口初始化、延时初始化、USMART初始化、初始化按键及陀螺仪模块MPU6050;
⑦得到加速度传感器数据及陀螺仪数据;
⑧不断地把传感器得到的角度值传入舵机控制函数来控制舵机转动的角度。
4 结论
本系统将三轴云台控制模式与VR技术结合起来,让使用者获得优良的人机交互感和沉浸式体验感,降低其工作量和操作难度,提高使用者对图像接收处理的工作效率。在5G技术即将推行的当下,对机载云台技术和VR技术做出的每一步尝试和实践都可能在将来的军事、航空、建筑等多个领域有着重要意义。
猜你喜欢
现代装饰(2022年6期)2022-12-17
现代装饰(2022年6期)2022-12-17
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
摄影之友(影像视觉)(2020年2期)2021-01-14
电子制作(2019年23期)2019-02-23
百科探秘·航空航天(2017年9期)2017-12-31
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年7期)2016-08-21
