
多功能助力起立器的设计
2021-07-02 06:41曹轶萌解治琦王筱彤李羿霏
机械制造 2021年4期
□ 曹轶萌 □ 解治琦 □ 王筱彤 □ 李羿霏 □ 许 虹
华东理工大学 机械与动力工程学院 上海 201499
1 设计背景
人口老龄化现象在全世界范围内都比较普遍,老龄化现象引发很多问题。根据《世界人口展望2019》预测数据,结合现有数据修正,2020年我国60岁及以上人口为2.56亿人。此后一段时期内,老年人口以年均1 000万人的规模增长,至2026年突破3亿人,达到3.12亿人,至2034年突破4亿人,达到4.06亿人。2020年至2035年的15 a间,共将增长1.5亿人 。
随着年龄的增长,老年人在生理机能上出现很多障碍和病变,如活动能力降低、行动缓慢、平衡能力减弱。许多老年人在弯腰、站起时比较费力,起落困难且容易滑倒。
现今国内市场的助老产品还存在许多不足之处,笔者运用创新思维设计了一款多功能助力起立器,可以方便老年人的生活,用于养老院、社区等老年人集中的场所,能够为老年人服务。
2 设计过程
多功能助力起立器以人机工程学理论作为设计支撑。在设计前,笔者搜集了大量相关文献资料,奠定了理论研究基础。在实践部分,笔者采用调查问卷、访谈法、观察法了解老年人的实际需求,结合设计理念进行完善与重新设计。主要设计过程如下:
(1) 查阅相关文献,多方搜集资料,了解国内老龄化与空巢问题现状,掌握年龄增长对老年人生理和心理造成的影响;
(2) 分析市场上现有的老年人助行器,总结优缺点,寻求设计思路;
(3) 明确用户人群,主要针对有活动能力但虚弱无力、存在轻度运动障碍的老年人群体;
(4) 运用问卷调查和用户访谈的方法,进行用户研究,明确老年人群体对多功能助力起立器性能的期待点;
(5) 制订设计方案,完成可行性分析报告,并以此为依据进行设计实践。
3 同类产品比较与改进
产品的改进是一个持续的、永无止境的过程,应该给予足够的重视。
市场上常见的普通助行器如图1所示,优点是结构简单,有支撑结构,可以确保稳固性,缺点是活动性较差,不利于老年人的挪动。普通助行器完全依靠用户自身力量操控器材,用户人群受到限制,并且功能过于单一,无法满足用户的实际需求。
在普通助行器基础上改进设计的滑行助行器如图2所示,优点是不存在复杂的操作,增加了辅助轮,提高了活动性,缺点与普通助行器一样,在使用时需要用户弯腰,质心比较低,不省力。
经过进一步改进设计的辅助行走器如图3所示,优点是增加了支撑臂托,提高了质心,无需用户弯腰,非常省力,可以适用于下肢力量不足、承受不了自身体重而无法完成独立行走动作的用户群体。

▲图1 普通助行器

▲图2 滑行助行器

▲图3 辅助行走器
考虑到老年人的身体较虚弱,在行走过程中身体可能会处于疲惫状态,所以进一步改进,设计得到可坐式助行器,如图4所示。其优点是助行器上设有手闸用以控制速度,有座椅结构,方便用户休息。
但是,上述老年人助行器都没有解决老年人起立困难的问题,功能单一,设计方面还存在许多需要改进的地方。笔者在分析对比后,运用创新性思维设计了一款多功能助力起立器,以满足市场需求。
4 总体结构
多功能助力起立器外观如图5所示,可实现的功能是通过可控自动升降扶手托住老年人的腋下,助力老年人完成起立动作。多功能助力起立器底板上安装有固定扶手,给予老年人支撑点。右侧固定扶手前端可转动,通过键连接和销连接带动齿轮机构与底板下的多连杆机构工作,实现可控转向功能。底板前端安装有调速电机,通过皮带传动驱动后轮前进,利用单片机实现调速功能。左侧固定扶手下部安装刹车装置,方便用户及时制动,确保安全性,防止意外发生。多功能助力起立器主体上安装折叠座椅,老年人疲惫时可以坐下休息,在节省空间的同时满足用户需求。

▲图4 可坐式助行器

▲图5 多功能助力起立器外观
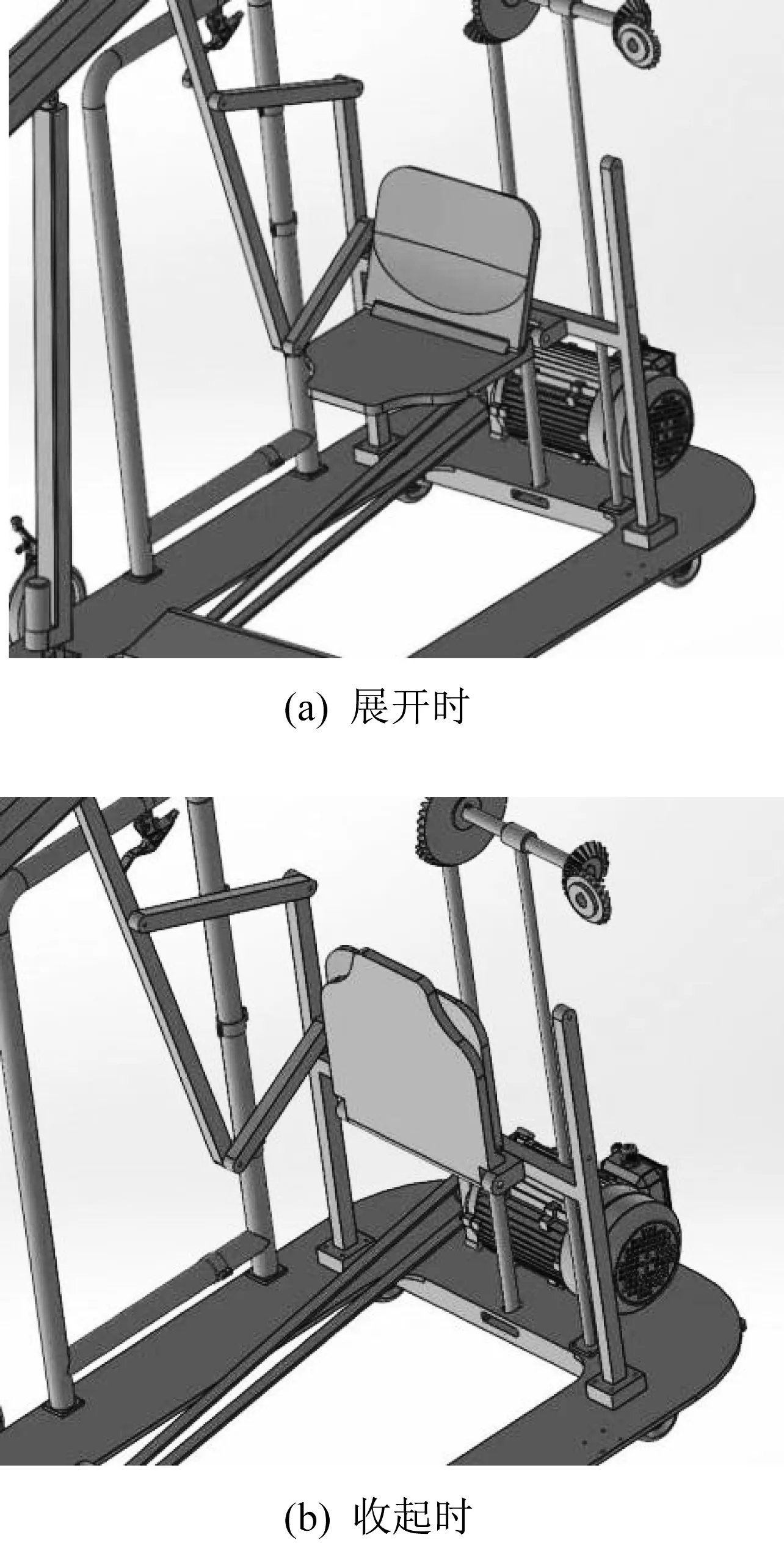
5 自动升降扶手
自动升降扶手包括电动推杆和带动电动推杆按预定轨迹实现转动的多连杆机构。
5.1 多连杆机构
多连杆机构包括铰接杆、连杆、固定销。在底板的左右两侧各固定一个铰接杆,每一个铰接杆上铰接有曲柄和摇杆,铰接杆结构如图6所示。
铰接点2离底板的距离为364 mm,连杆长度,即铰接点3与铰接点4之间的距离为465 mm,摇杆长度为311 mm,曲柄长度为220 mm,铰接点1与铰接点2之间的距离为230 mm。
5.2 电动推杆
电动推杆的活动端通过一个铰接点在自动升降扶手上的指定位置处铰接,电动推杆的固定端通过支架安装在底板上。
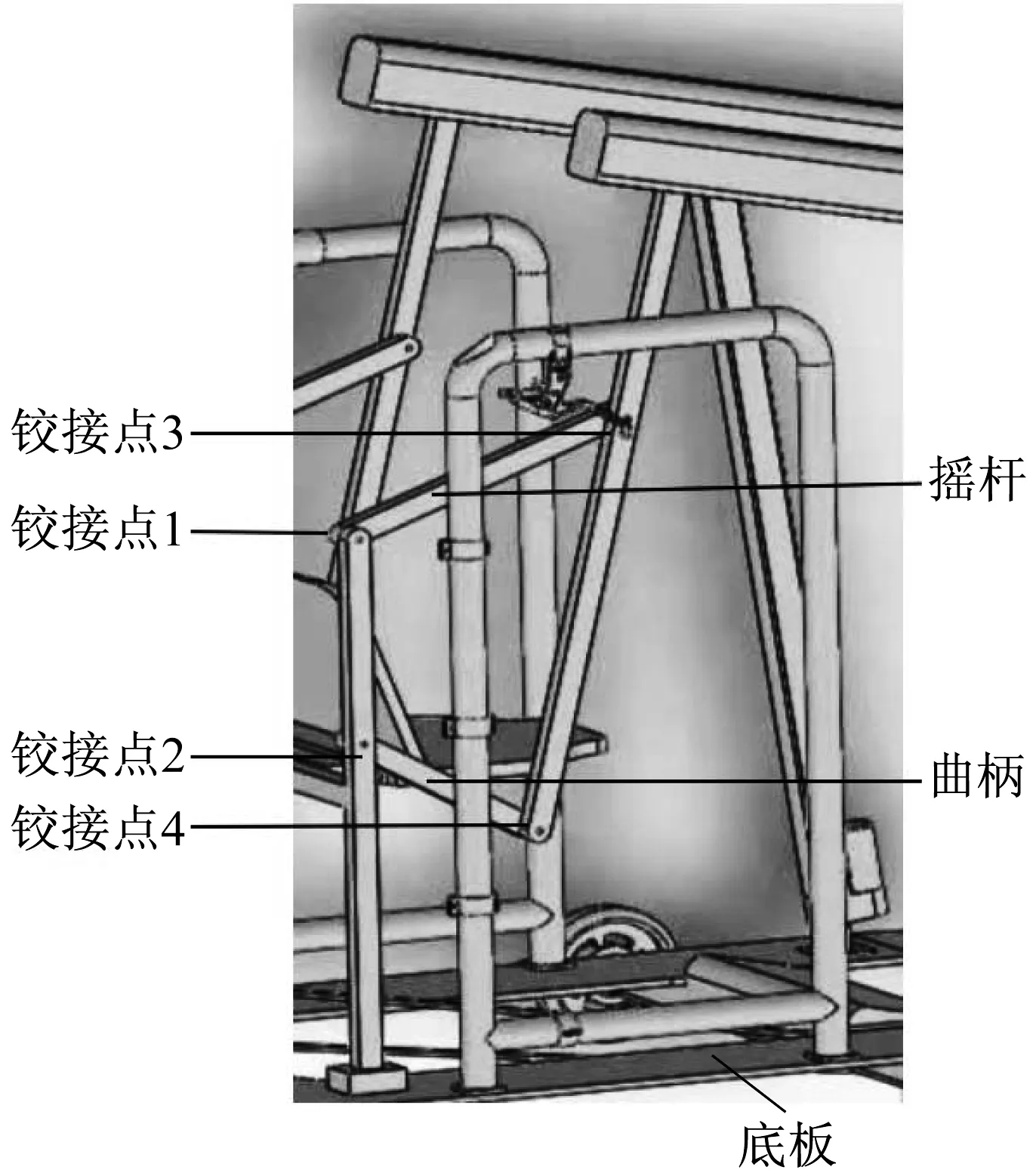
▲图6 铰接杆结构
电动推杆在完全收缩状态时,收缩距离为900~905.75 mm,并且自动升降扶手与水平面之间的夹角为0°。电动推杆在完全伸展状态时,伸展距离为1 300~1 303.75 mm,并且自动升降扶手与水平面之间的夹角为30°。
电动推杆连接有一个控制器,控制器安装于任意一个固定扶手上。铰接杆与电动推杆固定端支架之间的距离为750 mm。
6 可控转向机构
可控转向机构包括安装在固定扶手前端的第一转轴、齿轮机构及安装在底板前端的转向机构。
6.1 第一转轴
底板的左右两侧通过固定支架各安装一个固定扶手,固定扶手长464 mm,两个固定扶手之间的距离为616 mm。右侧固定扶手前端20 mm处通过键连接第一转轴,用户转动该转轴即可实现前轮转向功能。
6.2 齿轮机构
齿轮机构如图7所示。第一齿轮与第一转轴通过键连接第一齿轮与第二齿轮啮合传动,传动比为1∶2。第二齿轮通过键连接第二转轴,第二转轴安装在支撑托架上,可保持稳定,支撑托架安装在底板上。第二转轴通过键连接第三齿轮,第三齿轮与第四齿轮啮合传动,传动比为1∶1。第四齿轮通过键连接第三转轴,第三转轴固定在转向机构上。
6.3 转向机构
转向机构是一个多连杆框架,未转动变形时为长方形,长为450 mm,宽为180 mm。各连杆通过销连接在一起,其中第一连杆和第二连杆分别和两个前轮固定连接在一起,实现同步转动。通过扶手前端第一转轴的转动带动齿轮机构转动,从而带动第三转轴转动,使长方形的多连杆框架变形为平行四边形,使前轮实现转向。转向机构如图8所示。

▲图8 转向机构
7 其它结构
7.1 驱动调速装置
驱动调速装置由电机和皮带轮机构组成,如图9所示。电机通过固定支架安装在底板上,通过皮带轮驱动后轮前进。电机由单片机进行控制,可以实现调速功能。
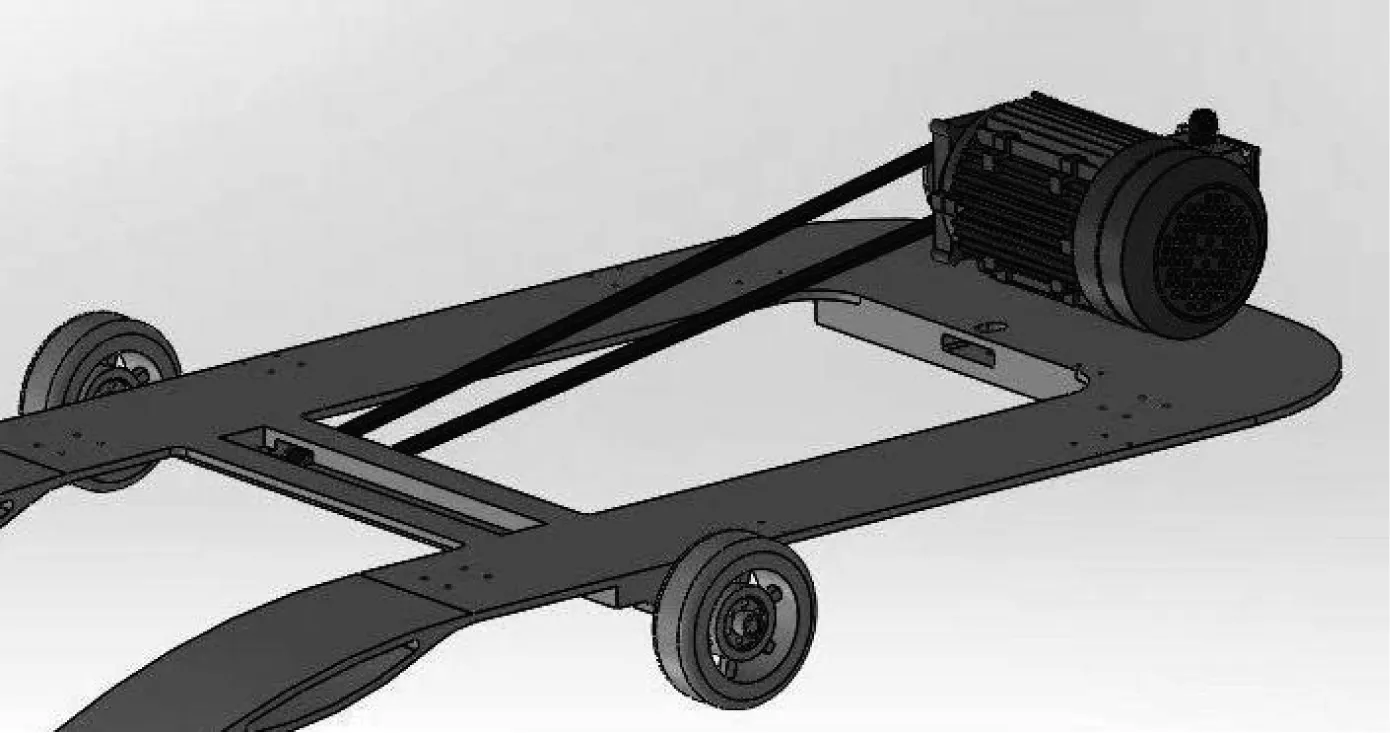
▲图9 驱动调速装置
7.2 刹车装置
刹车把手安装在固定扶手下方,用户可以通过握紧刹车把手控制滚动轮,起到减缓滑移,保护用户安全的作用。
7.3 折叠座椅
底板上安装折叠座椅,用户疲惫时可以坐下休息,在节省空间的同时提高使用的便捷性,满足用户需求。折叠座椅如图10所示。
▲图10 折叠座椅
7.4 防倾倒支座
考虑到用户起立过程中施加至多功能助力起立器升降扶手的压力较大,存在侧翻等安全隐患,设计了防倾倒支座,如图11所示。
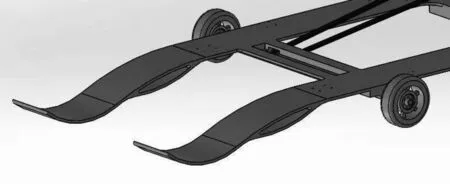
▲图11 防倾倒支座
8 创新点
多功能助力起立器的机械结构灵活巧妙,用最简单的设计达到效益最大化。
多连杆机构带动自动升降扶手平稳地按特定运动轨迹实现高度和倾斜角度的变化,帮助用户完成起立动作。
可控转向机构采用多连杆框架,通过第一转轴的转动带动齿轮机构转动,进而带动第三转轴转动,使长方形多连杆框架变形为平行四边形,进而使前轮实现转向。
多功能助力起立器集多种功能于一体,包括助力起立、驱动前进、改变速度、轻松转向、坐立一体等,提升了产品的性价比,更能满足用户需求。
多功能助力起立器可以在不同的空间环境中使用,使用户在家中卧室、厨房、卫生间等地点实现轻松移动,更能够方便用户在户外运动,适应性强。
9 结束语
在全球步入老龄化的社会背景下,解决老年人行动不便的问题具有重要的社会意义。笔者设计的多功能助力起立器弥补了传统助行器的不足,为开发、设计新型助行器提供了新的途径和方向,具有市场前景。
猜你喜欢
保健与生活(2022年14期)2022-07-06
中老年保健(2021年10期)2021-08-24
上海大中型电机(2021年1期)2021-06-09
中国质量与标准导报(2019年1期)2019-09-10
山东冶金(2019年2期)2019-05-11
长寿(2019年2期)2019-01-27
设备管理与维修(2018年15期)2018-11-08
设备管理与维修(2018年8期)2018-08-13
中国核电(2017年1期)2017-05-17
电脑爱好者(2016年23期)2017-01-05
