
电动力农机直流调速控制器的设计与试验
2021-07-02 01:49陆奇志曹阳明
新疆农机化 2021年3期
聂 伟,陆奇志,曹阳明,尹 倩
(新疆交通职业技术学院汽车工程学院,新疆乌鲁木齐830052)
0 引言
随着化石能源枯竭造成的油价上涨与国际对环境污染问题的关注,内燃机驱动逐步被电力驱动所替代。为了顺应时代的发展,电动农机逐渐成为未来的发展趋势。传统农机动力源为柴油内燃机,除排放碳氧化物与氮氧化物造成大气污染,也会因为油污问题污染土地进而影响粮食品质[1]。
目前主要限制电动农机发展的因素为电池耐久度与使用寿命,随新能源汽车的普及该问题在未来有望被解决。电动农机具有能量利用率高,输出扭矩大,零污染排放且容易小型化的优点[2],当前主要应用于小型农具的设计,如除草机、施药设备、温室大棚耕种机械、排灌与畜牧机械等[3]。
本文设计了一种直流电机调速控制器,调速方式为脉冲宽度调制(PWM)调节电机电枢的供电电压[4],可用于电动力农用机械调速控制[5],如小型收割机转向系统[6]、小型田间运输设备的驱动控制[7]、施肥与除草机的电力驱动控制等[8],具有成本造价低廉,可与电脑通信的特点。
1 系统硬件设计
控制器硬件设计流程如图1,涉及到单片机,上位机通讯,工作状态指示,温度检测与功率驱动。由上位机串口发送控制指令,下位机收到指令后将工作状况示反馈到上位机。可多个并联控制,在需求直流电机的控制场合进行工作,用于农机装备的直流调速控制,并具有正反转的控制功能。

图1 硬件设计流程
1.1 控制芯片
控制器方案中单片机选型很重要,硬件开销需求为几路PWM 控制信号,串口通信,普通I/O 口。由于51单片机不具有独立PWM 模块需要用I/O 口模拟占用CPU 资源,所以选择ATMEL 公司Atmega16 芯片。该芯片具有独立PWM 资源,可输出2 路8 位PWM 信号和1 路16 位PWM 信号,可以满足本文设计需求。图2是Atmega16 的最小系统,编程下载接口采用ISP[9-10]。

图2 Atmega16 最小系统
下表为单片机资源分配,部分功能需配置单片机Atmega16 熔丝位,I/O 分配依据为电路设计和程序设计提供便捷。

表1 片上资源分配
1.2 功率驱动
考虑长久工作稳定性,选取BTS7960 半桥驱动作为功率芯片。BTS7960 内部为P 沟道高电位场效应晶体管与N 沟道低电位场效应晶体管,结合一个驱动芯片形成完全整合高电位半桥。由于电气性能限制,输入电压必须小于27 V,同时极限承载电流为43 A。
控制器设计目标是实现两路全桥控制,按照传统BTS7960 驱动方式将使用四路PWM 信号,单片机资源将不足以支撑控制需求[11-12],本文使用一种改进驱动方式,考虑到芯片具有使能端,可以利用选通方法来控制芯片输出。其工作顺序是:当使能端为高电平,输入端有信号才会接通。所以可用单片机普通I/O 口作为芯片选通端接入到芯片输入端IN,将PWM 信号一直加载在芯片使能端。图3 即为改进控制电路。
BTS7960 使能端一直有PWM 信号,等价为两功率桥,均收到PWM 信号,但因输入端IN 低电平,所以芯片不工作。此时利用普通I/O 口作为输出端,置高一路芯片输入端即可工作[13]。该控制方式节约单片机内部资源达到同样控制效果,可简化程序,减轻单片机负载,提高代码效率。

图3 BTS7960 改进控制电路
1.3 串口通信
RS232 是个人计算机上的通讯接口之一,在串行通讯时,要求通讯双方都采用一个标准接口,使不同的设备可以方便地连接起来进行通讯。单片机采用TTL电平,即+5 V 为逻辑“1”,0 V 为逻辑”“0,RS232 定义电平+12 V 为逻辑”“0,-12 V 为逻辑”“1,所以需要电平转换芯片,在此选用MAX232。图4 是基于此的电路,外接5 个电容为内部电荷泵的储能器。Atmega16 具有一路USART,芯片提供两路电平转换,使用时可任意选择[14]。

图4 串口通信电路
1.4 温度控制
由于系统工作时产生大量热量,需要对其进行温度监控。采用PWM 风扇进行散热,若用单片机对其进行控制就必须要增加一个电机控制芯片。此处选择L9110S驱动芯片,图5 为L9110S 驱动控制电路。其中OA 和OB 是芯片的选通控制引脚,IB 和IA 是连接风扇的两个引脚,选通OA 和OB 就可以改变输出的逻辑。
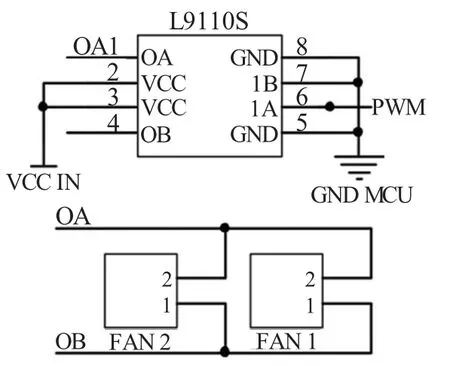
图5 风扇控制驱动电路
DS18B20 是美信公司的三脚TQ92 封装温度传感器,I/O 定义分别是GND、DQ 和VDD。采用单总线协议通信,自带A/D 转换器。采集模拟信号后通过A/D 转换器转换成数字信号形成对应数值,编程可以实现最高12 位温度存储值,在寄存器中以补码的格式储存。由于只有一条通信线,接收和发送占用单片机一个I/O口,所以硬件电路简单,便于嵌入。但正是由于使用一条信号线来收发,所以在控制上需要注意工作接收时高阻输入,发送时开漏输出,但传感器不具有输出高电平能力,所以需要在DQ 端接上拉电阻[15]。
1.5 电路与程序
PCB采用AltiumDesigner13进行设计,双层板布局,所有和功率芯片通信的I/O 端口都进行了地线隔离,稳压滤波,保险设计。大电流承载处加粗布线阻焊开窗加焊,防止绝缘击穿[16]。驱动功率供电和控制芯片供电必须进行隔离,所以使用双电源设计。控制芯片使用12 V 电源供电并用L7805 进行5 V 稳压。
程序使用ICCAVR 进行编译设计,程序设计流程如图6。串口调试工具为格西烽火,该工具可以创建激励表,自动向下位机发送预先设置好的字符串。

图6 程序流程图
Atmega16控制器初始化USART。数据寄存器UDR,控制和状态寄存器UCSR,波特率寄存器UBRRL,UBRRH。UDR是USART发送和接收的公用寄存器,写入UDR 时通过UDR 发送,读取UDR 时返回UDR 的内容。通过控制三个状态寄存器UCSRx 可以配置串口的通信模式,数据帧的位数,起始停止位等。UBRRH 和UBRRL 合并为16 位的寄存器UBRR,前者为UBRR的高8位,后者为低8 位。此寄存器用来确定通信时的波特率。在异步模式下波特率的计算公式如下:

已知硬件时钟频率fosc 为8Mhz,为了整体通信速度波特率选用19200。将计算得到UBRR 数值高八位赋值UBRRH,低八位赋值UBRRL 则可以实现波特率的设置,需要注意的是只有先写入高八位,后写入低八位设置才能有效。接收和发送采用ASCII 码的方式,串口接收到的数据将写入单片机数据缓冲区,在程序主循环中对缓冲区进行遍历搜索。
2 调试和试验结果
图7 为实际完成的控制器,经过测试所有设计功能均正常工作。

图7 控制器实物图
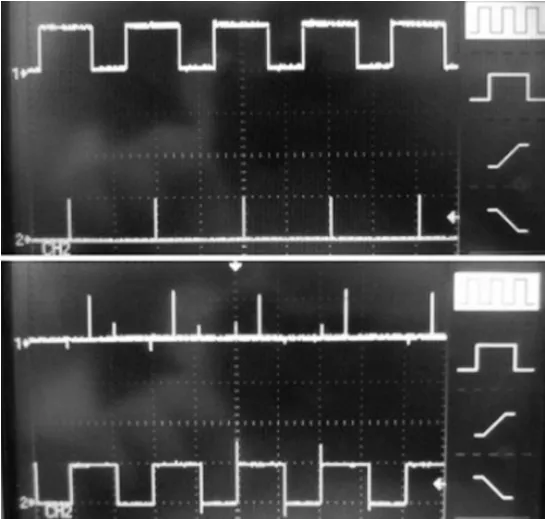
图8 PWM 控制测试
图8 为 PWM 测试,接入示波器 CH1 与 CH2,信号源分别来自Atmega16 定时器0 和定时器2。功率桥极限频率为25kHz,程序生成PWM 为19.65 kHz,考虑信号干扰问题尽量使用高频。采用相位修正PWM,该模式下方波左右比较对称,其工作形式为计数器从BOTTOM 计数到TOP,再从TOP 反向计数比较匹配输出,所以PWM波形上升沿下降沿比较对称,更适合用于电机PWM 输入控制,上位机发送字符串修改定时器寄存器数据,实现0%~100%占空比可调。
使用某150W直流电机进行测试,其额定电压为24V,额定转速7 000r/pm。图9 为基于此电机的控制器空载转速测试,此处只给出桥A 测试数据。据图可知正转反转调速特性趋势大体相同,由于电气设计原因正转要慢于反转转速。

图9 电机转速随占空比变化

表2 功率特性
表2 为不同占空比下正反转的电压电流特性。通过数据可以看出,功率在50%占空比以上电流基本不发生变化,功率的调整主要由电压脉宽调制进行控制;50%以下占空比电压和电流会同时发生降低,功率不再为线性变化。低于20%占空比功率将低于电机最低空载功率,电机不发生转动,但可检测到电阻损耗。测试结果表明,针对实验测试用150W直流电机,调速控制可实现20%~100%占空比调速,50%以上占空比可稳定调整电机功率大小以此控制电机转速。
3 结论
使用Atmega16 单片机为控制器核心,对半桥芯片设计了一种不同于通用方案的驱动电路,简化了编程同时节约单片机设备资源,最终实现直流电机的全桥驱动控制,通过试验验证控制器的控制功能。具有造价低廉,易于设计的特点,可以为电动力农机电机驱动提供廉价设计方案思路,具有一定的实际应用价值。
猜你喜欢
中国自行车(2022年3期)2022-06-30
计算机技术与发展(2020年4期)2020-04-30
现代计算机(2020年3期)2020-03-05
汽车工程师(2019年7期)2019-08-12
电子制作(2019年9期)2019-05-30
网络空间安全(2019年8期)2019-03-18
科技创新与应用(2018年23期)2018-09-13
电子技术与软件工程(2018年1期)2018-03-22
电子技术与软件工程(2017年5期)2017-04-23
科技传播(2012年10期)2012-06-06
