
轮式装置推手高度设计分析
2021-07-01 10:42:54赵庆江郭会峰路遥
装备维修技术 2021年50期
赵庆江 郭会峰 路遥
摘 要:手推轮式设备在移动时,有时需要配备推手或拉手,根据路况等不同等不因素,需要合理设计推手高度,否则在推拉移动时会非常费力,甚至会把设备推倒,也无法使设备正常移动行走。本文以一种手推式消毒设备为例,从受力效果方面,讨论了推手高度与轮径大小、轮距、路障及重心位置等因素的关系,为改善手推装置的受力情况,方便推拉操作,修改轮径大小,修改推手或拉手的位置提供了参考依据;提出了动力角和障碍角的概念,为判断手推装置是否会倾覆提供了理论基础。本文进行了静力分析,力的加载过程为缓慢进行,不考虑惯性力;忽略了装置刚刚移动或倾倒后的力矩变化;忽略轮轴与轮之间的摩擦力。
关键词: 推手高度,动力角,障碍角
一、背景
手推轮式设备或装置经常出现在生产生活中,如草莓运输手推车[1],手推学步车[2],手推式核桃捡拾机[3],手推式树干涂白刷树机[4],由于安装了脚轮,大大的方便了设备的移动,针对手推车的受力情况,王友文对手推车上坡路线[5]进行了数学建模,。本文中的手推式消毒设备应用于母猪舍消毒,在变换消毒位置时,需要在漏粪地板上行走,漏粪地板的缝隙宽度为δ=23毫米;推手高度H=900毫米,脚轮跨距L=526毫米;轮半径R=50毫米;重心位置a≈L/2,但具体不确定;解直角三角形OCB,经计算得:h=sqrt(R²-δ²/4)=48.66毫米。
二、受力分析
当脚轮落入缝隙后,在推力F的作用下,会有以下三种情况发生:1、推力不够大,车体既不移动也不倾倒。2、如果车体不移动,由于H>0,只要推力足够大,动力力矩F*H必然大于阻力力矩G*a,所以车体必然发生倾倒。3、如果车体不倾倒,由于h>0,只要推力足够大,动力力矩F*h必然大于阻力力矩Gc*(δ/2)。所以前轮必然发生转动,使得车体从缝隙中行驶出去。
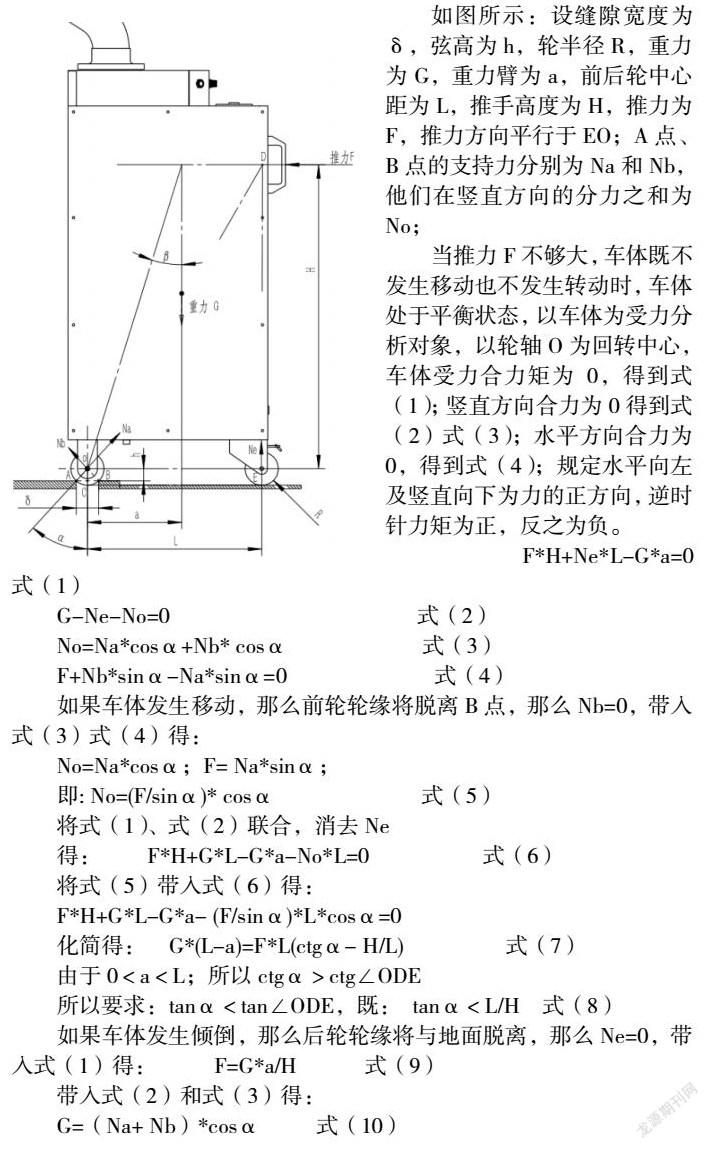
如图所示:设缝隙宽度为δ,弦高为h,轮半径R,重力为G,重力臂为a,前后轮中心距为L,推手高度为H,推力为F,推力方向平行于EO;A点、B点的支持力分别为Na和Nb,他们在竖直方向的分力之和为No;
当推力F不够大,车体既不发生移动也不发生转动时,车体处于平衡状态,以车体为受力分析对象,以轮轴O为回转中心,车体受力合力矩为0,得到式(1);竖直方向合力为0得到式(2)式(3);水平方向合力为0,得到式(4);规定水平向左及竖直向下为力的正方向,逆时针力矩为正,反之为负。
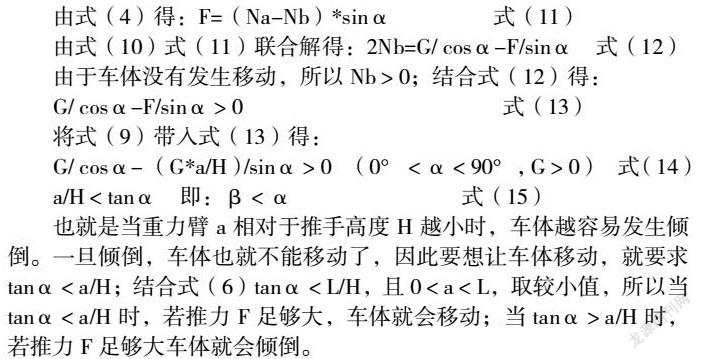
也就是当重力臂a相对于推手高度H越小时,车体越容易发生倾倒。一旦倾倒,车体也就不能移动了,因此要想让车体移动,就要求tanαa/H时,若推力F足够大车体就会倾倒。
三、应用
由式(7)可得:F= G*(L-a)/(L*ctgα- H),当推手高度,轮径,缝宽,轮距都确定的情况下,重力臂a越大,越接近L时,推力越小,越容易将车体从缝隙推出去。
本例参数中:tanα=(δ/2)/h=(23/2)/48.66=0.2363,a/H≈(526/2)/900=0.2922。因而tanα小于a/H;因而车体会发生移动而不会被推倒。如果重心从轮距中线向左偏移53毫米,那么a/H=210/900=0.2333,因而tanα大于a/H,在推动车体时,车体将首先发生倾倒而不会从缝隙中滚动出去。
设备在设计阶段,很难严格的控制重心位置,同时也为了便于设备推拉转移轻便,就有必要根据路障高度,合理選择车轮直径,合理调整推手高,或将推手改为拉手,将着力点降低。本例中由于设备整体高度不高,为了不躬身推车,将推手高度定为900毫米,这时估算重心位置,适当加大轮距,增加重力臂a值,适当加大轮直径就显得尤为重要。
四、结论
当推力F足够大时,所推设备能否从缝隙中推出去,与车体重量无关;与重心位置,缝隙宽度,推手高度,轮径大小密切相关。当α<β时,只要F足够大,一定会将设备从缝隙中推出去。当α>β时,无论推力F有多大,都不会将设备从缝隙中推出去;过大的推力只会导致设备发生倾覆。可将α角定义为障碍角[6],将β角定义为动力角[7],只有当动力角大于障碍角时,才有可能将设备推过障碍物,否则过大的推力会导致设备倾覆。动力角β大小由动力臂H和重力臂a来决定,障碍角α大小由障碍高度(或缝宽)和车轮直径决定。
参考文献:
[1]一种草莓采摘运输手推车.[J]张灯彩.安徽省,阜阳市殿兴农业科技有限公司,2019-07-23.
[2]“RUN”多功能婴儿手推学步车产品设计[J].饶洁,刘宗明.湖南包装. 2021,36(05)
[3]手推式核桃捡拾机设计与试验[J].买合木江·巴吐尔,杨莉玲,刘奎,刘佳,沈晓贺,朱占江,祝兆帅,马文强.
农业工程,2021,11(01):98-100.
[4]一种手推式树干涂白刷树机设计[J].李凡,朱红波,康子辉.河南科技,2020,39(34):64-66.
[5]手推车上坡的数学模型[J].王有文.忻州师范学院学报,2014,30(02): 1-3+13.
[6]挤压模障碍角作用质疑[J].周亮.塑性工程学报.2006(02)
[7]擦窗机的轨道设计[J].曹恩钦,吴安,刘风军.建筑机械化.2006(01)
作者简介:
赵庆江、1976年5月、男、汉族、黑龙江省哈尔滨市、工程硕士、高级职称;研究方向:机器人及其在工业和农牧业方面的应用与设计;单位:哈尔滨天河自动化设备有限公司。单位地址:哈尔滨松北区
