田间作物群体三维点云柱体空间分割方法
2021-06-30 06:00:56林承达谢良毅胡方正
农业工程学报 2021年7期
林承达,韩 晶,谢良毅,胡方正
田间作物群体三维点云柱体空间分割方法
林承达,韩 晶,谢良毅,胡方正
(华中农业大学资源与环境学院,武汉 430070)
农田作物群体表型信息对于研究作物内部基因改变和培育优良品种具有重要意义。为实现田间作物群体点云数据中单个植株对象的完整提取与分割,以便于更高效地完成作物个体表型参数的自动测量,该研究提出一种田间作物柱体空间聚类分割方法。利用三维激光扫描仪获取田间油菜、玉米和棉花的三维点云数据,基于HSI(Hue-Saturation-Intensity,色调、饱和度、亮度)颜色模型进行作物群体目标提取,采用直通滤波方法获取作物茎秆点云,基于茎秆点云数据使用欧氏距离聚类分割算法提取每个植株的聚类中心点,并以聚类中心点建立柱体空间模型,使用该模型分割得到田间作物每个单体植株的点云数据。试验结果表明,该研究的方法对油菜、玉米和棉花3种作物的分割准确率分别为90.12%、96.63%和100%,与欧氏距离聚类分割结果相比,准确率分别提高了36.42,61.80和82.69个百分点,算法耗时分别缩短为后者的9.98%,16.40%和9.04%,与区域增长算法分割结果相比,该研究的方法可用于不同类型农作物,适用性更强,能够实现农田中较稠密作物植株的分割。该研究的方法能够实现农田尺度下单个植株的完整提取与分割,具有较高的适用性,可为精确测量作物个体表型信息提供参考。
作物;激光;三维点云;柱体空间模型;分割
0 引 言
随着人口数量的不断增加,人类对粮食和油料作物的需求急剧上升,但其产量却受到可利用耕地减少、土地荒漠化和自然灾害等的影响而难以提升。解决这一问题的主要手段是选育优良作物品种[1],由于作物内在基因改变和作物群体生长参数密切相关,充分理解作物基因型和生长参数之间的关系是提高作物产量的关键[2-5],这离不开对作物表型参数的大量分析。田间高通量表型获取技术是限制作物改良和精准农业发展的主要瓶颈,能够实现整个生长周期表型性状的自动测量,为获取高精度目标参数信息提供了条件[6-9]。
传统农作物表型参数获取存在耗时长、具有破坏性等问题,难以满足现代农业科学研究需要。三维激光扫描技术克服了作物参数传统测量的局限性,使得无损、高效、高精度参数测量成为了可能,是目前作物群体生长参数测量的研究热点[10-12]。通过对获取的三维点云数据进行处理,可以实现作物不同器官生长参数的测量[13-16]。Paulus等[17]通过激光扫描仪采集麦子点云数据,重建麦子的植株架构,实现了单叶和单茎器官的特异性生长监测。郭新年等[18]针对作物株高测量中顶点与基点确定困难的问题,设计基于激光视觉的作物株高测量系统,相对误差在2.17%以内。作物生长参数的自动化测量是数字农业全面推广的前提,而农作物不同器官、个体的分割与作物参数自动测量密切相关[19],作物具有复杂且随机的形态结构,分割难度较大,目前已有不少学者对作物点云分割进行了深入研究[20-23]。Gélard等[24]利用向日葵RGB图像重建了向日葵三维模型,并基于模型分割出向日葵的茎,叶柄和叶片。温维亮等[25]利用欧氏距离聚类方法实现了果穗籽粒的分割,籽粒分割率可达90%以上。Wu等[26]利用深度相机对水蜜桃三维重建,基于颜色信息和果实轮廓特征实现了果实的分割。Sun等[27]通过获取田间棉花点云数据,基于点云密度聚类方法实现棉铃数统计。Zermas[28]等提出RAIN(Randomly Intercepted Nodes,随机截取节点)算法,研究随机放置的某个点云在整个点云表面滑动的行为,依据叶茎的不同表现实现叶茎分离。Jin[29]等使用快速R-CNN(Region-Convolutional Neural Networks,区域卷积神经网络)训练样本识别茎秆,结合区域生长法分割出玉米个体。目前国内外对点云分割算法研究较多,但针对农田尺度下非结构体对象玉米、油菜及棉花等作物群体的点云数据分割方法较少,作物群体点云数据中单个植株的提取与分割是作物表型参数高效精确测量的前提,是研究作物基因型和生长参数关系的基础,因此提出能够满足田间作物群体点云数据中单体植株分割的方法有十分重要的意义。
本文以田间种植的玉米、油菜和棉花作为研究对象,针对传统欧氏聚类点云分割算法存在的过分割和欠分割等导致分割精度低的问题,以及田间点云数据采集过程中遮挡等导致的数据断裂、缺失现象,提出了一种适应农作物群体点云分割的柱体空间聚类分割方法,通过三维点云数据提取每个植株的聚类中心建立柱体空间,实现田间作物个体植株之间的分割,为解决农田尺度下复杂作物群体分割难的问题提供一种新的方法,为后续作物表型参数的精确测量奠定基础。
1 材料与方法
1.1 点云数据获取
田间试验于2019年3月和7月在湖北省华中农业大学实验基地进行,选取田间花期油菜、苗期玉米以及花期棉花为对象,分别选取162、89和52株,使用FARO FocusS SeriesS 70三维激光扫描仪进行点云数据扫描,3种作物信息与试验设置如表1所示。为了验证本文方法的适用性,选取3种作物不同生长时期的点云数据进行数据处理和结果评价,其他生长期的作物数据也适用于本文方法。

表1 作物信息与点云采集参数
FARO FocusS SeriesS 70是一种基于相位测量的三维激光扫描仪,主要规格参数如表2所示。田间作物群体点云数据采集方案如图1所示。图中和分别为高站点和低站点,高站点在植株顶端上部30cm附近,低站点在植株顶端位置附近,球1、2、3为标靶球。
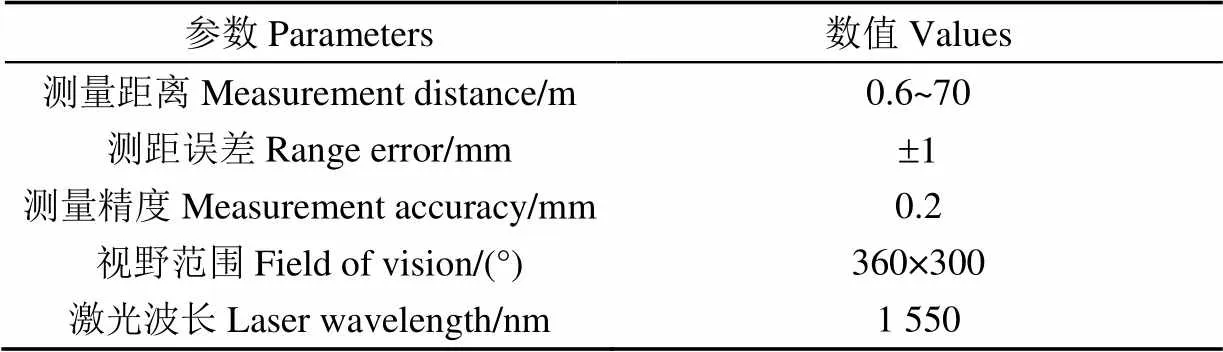
表2 FocusS SeriesS 70规格参数
注:1、2、3、4分别为测站点1、2、3、4处的高站点;1、2、3、4分别为测站点1、2、3、4处的低站点。
Note:1,2,3and4are the high stations of the test site 1, 2, 3 and 4 respectively;1,2,3and4are the low stations of the test site 1, 2, 3 and 4 respectively.
图1 作物群体点云数据采集方案
Fig.1 Crop population point cloud acquisition scheme
以苗期玉米为例,首先将仪器架设在图1中的1站点,该站扫描结束后调整至1,该位置的高低站点扫描结束后移动至2高站点,扫描结束后调整至2,以此类推移动至3、4位置执行上述操作。由于农田作物种植密集,相互遮挡,单一站点无法获取目标的完整信息,因此在选取样地的四周布设测站点,采集目标不同部位的三维点云数据。油菜田测站点布设在样地四角和长边的中间,避免田块长边的中间数据缺失,玉米田和棉花田测站点布设在样地的四角,并通过调整仪器高度,在同一测站点采集2组点云数据,确保采集的田间点云数据具有完整的茎秆信息,每个测站点扫描1次,每次扫描10 min。在三维激光扫描试验开始之间,需要在试验区域周围摆放至少3个标靶球作为配准基础,标靶球为直径150 mm的白色空心球体,通过在不同站点获取的数据拟合球体球心和半径,为后续各个测站采集到的点云数据配准做准备。
1.2 点云数据预处理
田间作物点云数据预处理包括点云配准、点云去噪、目标点云数据提取和点云精简,具体步骤如下:
1)点云配准。本文基于标靶球进行不同测站数据的配准,使用FARO三维激光扫描仪配套的软件SCENE 2019将其配准到同一坐标系下,图2a为作物群体配准效果图。
2)点云去噪。采用深色扫描点过滤器、离群点过滤器和边缘伪像过滤器实现噪声点的剔除。
3)目标点云数据提取。为了将目标点云从原始点云中提取出来,需要对配准好的点云数据进行处理,目标点云提取主要分为2部分:第一部分是使用SCENE 2019对原始点云进行裁剪,保留作物研究区范围,第二部分是基于HSI颜色模型利用作物植株和土壤颜色的差异,实现作物群体目标提取,由于点云数据RGB彩色信息可能会受到不同天气光照和环境因素的影响,试验将RGB空间转换到HSI空间下,采用HSI空间下H分量用于分析颜色的差异。然而由于光照原因,作物根部颜色被映射到表层土壤,与作物植株颜色相近的土壤表层点云数据被保留,因此需要再利用条件滤波设置阈值实现这部分土壤和作物植株的分割,进而得到最终的作物群体点云数据,图2b为作物群体点云提取结果图。
4)点云精简。为了提高工作效率,降低后续处理复杂程度,通过曲率采样对点云数据进行简化处理。
1.3 欧氏距离聚类分割
传统点云数据分割常采用欧氏距离聚类方法[30],由于目标对象之间通常具有一定的距离,同一对象的点云往往距离更近,利用这种距离差异可以实现作物对象的分割,其主要过程是:首先对作物群体点云利用KD-tree(K-Dimensional tree)建立点云拓扑结构,查找点云的临近点,然后计算每个点与临近点的欧氏距离,将距离最小的归为一类,再对新生成的若干类别之间进行欧氏距离计算和迭代,直到划分的类别中任意2类间距离都大于设定阈值或满足分割后类的点云数量,完成点云分割。该算法的核心是点云之间的欧氏距离计算,设点云数据集合为,点云数据三维坐标表示为(,,),则中任意2点间的欧氏距离dist的计算公式如下:
1.4 柱体空间聚类分割
由于农作物在田间的生长状态复杂及非结构性特点,传统点云聚类算法不能满足农田尺度下作物群体点云数据的分割要求,存在过分割和欠分割问题。过分割是将背景误分割为前景目标,植株分割结果中包含了其他植株的数据;欠分割是将前景目标误分割为背景,植株分割结果中缺失了自身数据。本文提出一种适用于农田尺度下作物群体点云分割的柱体空间聚类分割方法。该方法的主要思想是通过直通滤波在作物群体点云数据轴方向上提取一定高度的植株茎秆,为保证提取茎秆的有效性,对带有叶片的茎秆数据通过法向量差异去除叶片。然后采用欧氏距离聚类方法对作物群体茎秆点云聚类,提取植株聚类中心;最后建立以聚类中心点为底面圆心的柱体空间,柱体半径和高度参数根据不同作物田间种植行间距和生长特点设置,以建立的柱体空间进行作物植株群体的分割。该算法的具体实现步骤如下:

2)计算点云数据集中各点的法向量=(,,),通过设置角度阈值,剔除中的叶片点云数据,提取作物群体点云茎秆数据集,因为提取的茎秆点云数据周围会存在一些噪点,可以利用包围盒去除噪声点,包围盒是一种离散点集最优包围空间的算法,使用聚类和最小包围盒方法去除包围盒内点数少于某个阈值的类别,最终得到只有茎秆的点云数据。角度阈值的计算公式如下:

4)根据聚类结果计算不同类别的聚类中心,聚类中心点集C(x,y,z)计算公式如下:

其中为聚类中心序号,为某个聚类类别中点云序号,为某个聚类类别中点的总个数,X、Y和Z分别为某个聚类类别中点云序号为时的、、坐标。

2 结果与分析
试验硬件处理平台:Windows 10 企业版 64-bit系统,1T固态存储,处理器Intel(R) Xeon(R) CPU E5-2620 v4 @ 2.10 GHz,16 G内存,显卡NVIDIA Quadro M2000。
2.1 欧氏聚类分割结果
本文首先采用欧氏距离聚类算法对油菜冠层、玉米和棉花群体点云进行分割,该算法的阈值设置会影响作物点云的分割效果。3种作物不同距离阈值下的分割植株数量和准确率见表3。
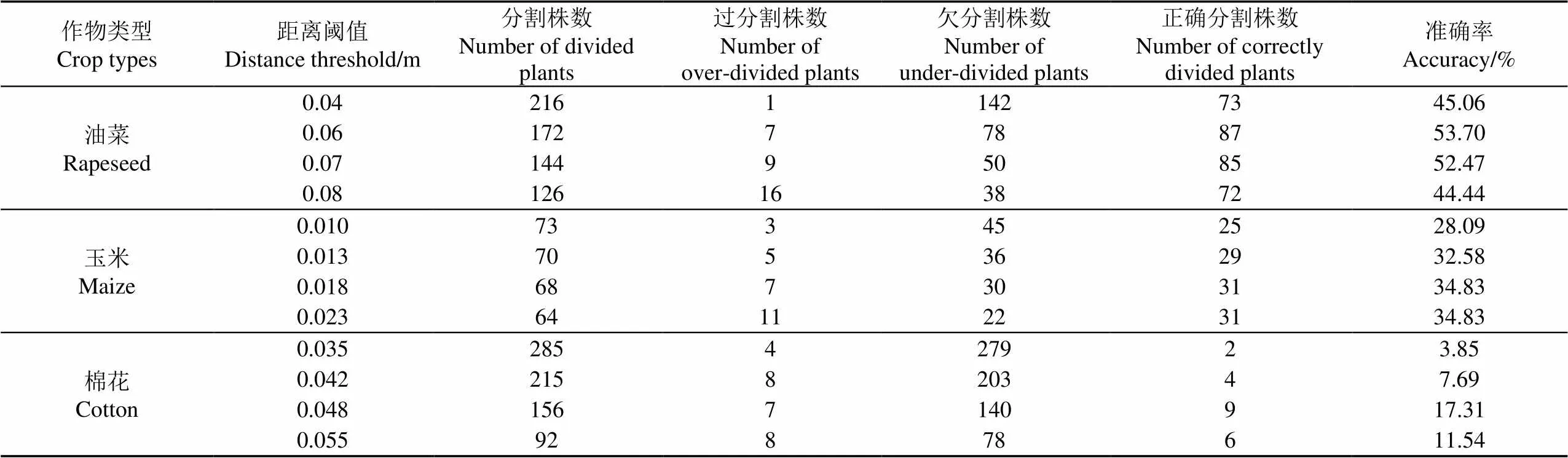
表3 不同距离阈值下的作物点云分割结果
欧氏距离聚类分割结果主要取决于距离阈值。表3中,准确率为正确分割株数与田间实际植株个数的百分比,从表3可以看出,随着距离阈值的增大,过分割株数逐渐增多,分割株数和欠分割株数逐渐变少,油菜正确分割株数先增加后减少,在距离阈值为0.06时准确率最高,为53.70%,玉米正确分割株数先增加后不变,在距离阈值为0.018和0.023时准确率最高,为34.83%,区别是阈值为0.018时比阈值为0.023时过分割株数减少,欠分割株数增多。综合分析可知,当距离阈值设置较小时,出现了一个植株被分割为不同类别的现象,为欠分割现象,当距离阈值设置较大时,相邻植株被分成同一类别,为过分割现象,经过参数优化和调整,由于农作物点云数据的复杂性以及部分植株点云之间存在粘连、断裂现象,均不能得到准确的分割结果。棉花分割结果正确率较低,完整正确的分割株数较少,由于棉花点云数据叶片较多,相邻植株叶片距离比较近,分割结果较为破碎,无法得到完整的个体植株,不能得到较好的分割结果。
综上所述,基于欧氏距离的聚类方法不能对油菜、玉米和棉花群体点云数据实现有效分割,在作物群体植株分割方面表现出一定的局限性,不能直接用于作物群体点云的分割实验。同时,田间作物点云数据量比较庞大、植株个数多,发生断裂的地方具有随机性,点云数据补全需要耗费大量的时间。本文针对采集数据中存在的点云粘连、断裂问题,在结合作物生长特点和农田种植特点的基础上,利用基于柱体空间模型的聚类分割方法进行农田作物点云分割。
2.2 柱体空间聚类中心
2.2.1 作物植株聚类中心提取
针对欧氏距离分割结果中出现的过分割和欠分割问题,本文提出基于柱体空间的聚类分割方法对作物点云进行分割,利用植株聚类中心建立柱体空间实现各个植株之间的分离。植株聚类中心的计算过程见图3。首先运用直通滤波沿着作物生长方向(轴方向)截取一定长度的作物茎秆,根据作物群体结构的复杂程度以及杂草遮挡的现象,滤波范围的设置原则为提取作物群体轴方向最小值,并在最小值基础上提取0.1~0.5 m范围内的点云数据,然后利用主成分分析(Principal Component Analysis,PCA)算法计算点云数据法向量,调整法向量数据一致性,该算法实现过程是为每个点构建局部邻域,拟合局部邻域的最小二乘平面,将拟合平面的法向量作为该点的法向量,根据作物茎秆与叶片生长特点,将法向量与水平方向夹角大于阈值的叶片点剔除,得到作物群体茎秆点云数据。试验得到作物群体茎秆点云的聚类中心点集C,将三维点集C降维投影得到植株聚类中心。
2.2.2 阈值对聚类中心提取结果的影响
因为采集数据过程中,部分植株点云数据会出现茎秆断裂、缺失等现象,所以在计算聚类中心时,出现了一个植株具有多个聚类中心点的现象。为解决这一问题,对初步计算得到的聚类中心点进行重复点剔除,对于和坐标值之间差值小于0.1的点做取舍处理,只保留其中一个。欧氏距离聚类的参数设置会影响作物个体植株聚类中心的提取结果,分析发现分割结果主要取决于最大迭代次数(Maximum Iteration Number,MIN),其他参数只要设置在合适的范围即可。作物提取中心点数量和准确率见表4,最优聚类中心提取结果见图4。
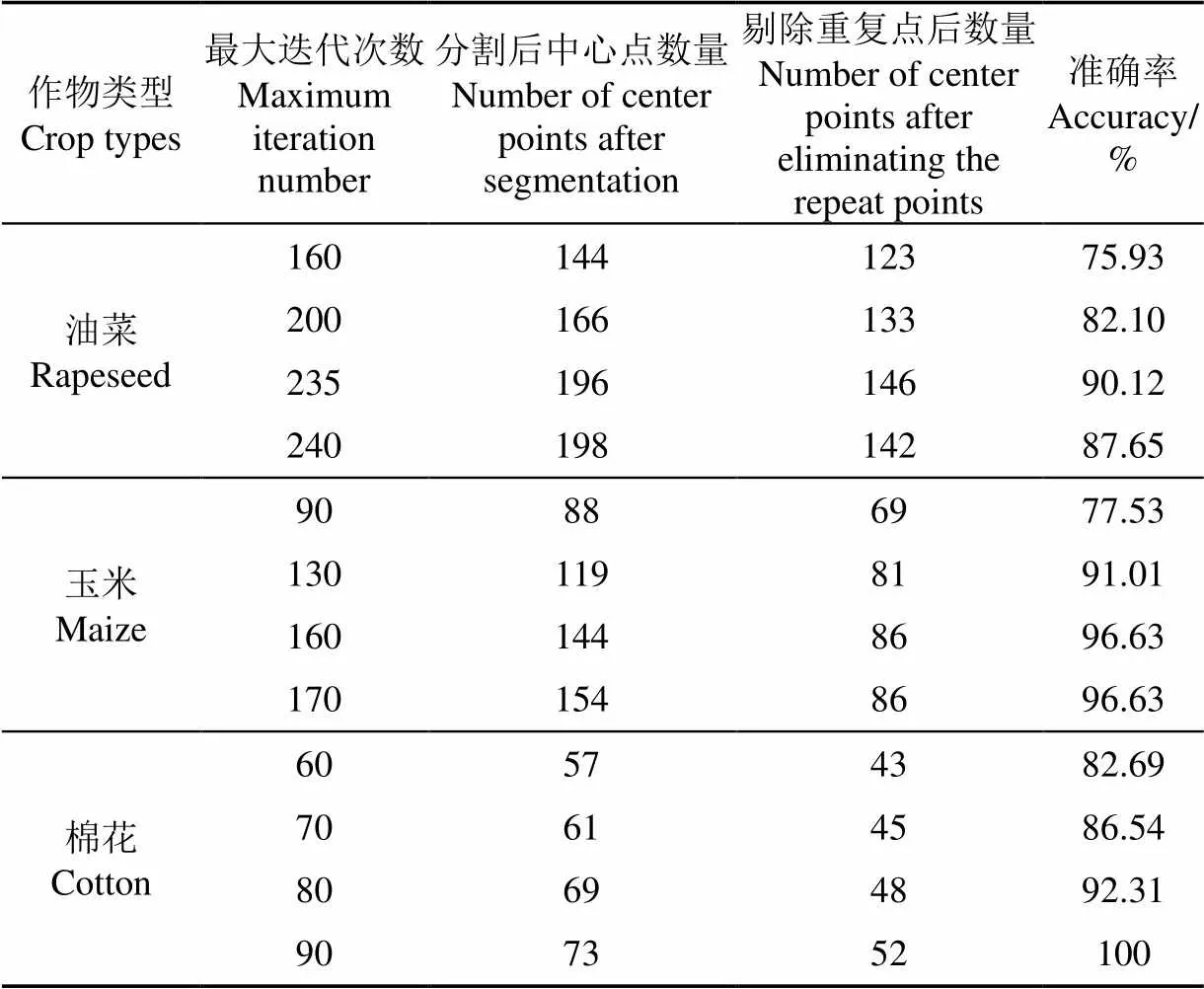
表4 不同参数下的植株聚类中心提取结果
从表4可以看出,随着最大迭代次数的增加,分割得到的中心点数量逐渐增加,本试验采集的棉花点云数据共有52个植株,在MIN为90时,剔除重复点后的聚类中心点数量与作物实际植株数量相等,且准确率为100%,油菜和玉米则分别在MIN为235和160时达到最大值。迭代次数增加能够提高中心点提取的准确性,因此MIN设置要大于实际植株个体数,且通过调整尽可能使得最终的聚类中心数量与实际植株个体数相等,本文设置初始迭代次数为植株个数,根据剔除重复点后的聚类中心点数量增加迭代次数,直到结果与实际植株个数相近且不再发生变化。
注:MIN为最大迭代次数。
Note: MIN is the maximum number of iterations.
图4 聚类中心提取结果
Fig.4 Clustering center extraction results
2.3 柱体空间聚类分割结果分析
2.3.1 柱体空间聚类分割结果
在提取植株聚类中心后,建立柱体模型空间,对提取的作物群体点云进行分割。根据作物种植特点,本文分别设置油菜、玉米和棉花柱体空间半径阈值为0.11、0.16和0.22,结果以不同假彩色显示来区分不同植株的分割效果,图5为基于本文方法的油菜、玉米和棉花分割结果图。
由图5a可看出油菜冠层点云数据分割效果较好,没有出现多个植株聚类为同一类别的现象,这也是本方法结合作物生长特性的优点,通过设置合适的阈值,完整地将油菜冠层植株点云分割出来。由图5b可看出玉米作物群体的分割效果较好,但出现部分相邻玉米植株下层叶片误分割的现象,原因为玉米叶片生长特点是自上而下叶片与茎秆夹角逐渐增大,因此下层叶片伸展较大,部分下层叶片超出柱体空间分割阈值而出现少量误分割,但作物植株的高度信息主要由靠近玉米中心的上层叶片决定,对作物群体参数测量结果没有影响。图5c棉花植株群体的分割效果最好,实现了不同植株个体之间的分割。
2.3.2 分割结果评价
不同分割方法的结果如表5所示,其中柱体空间聚类分割方法的准确率远高于欧氏距离聚类分割方法,油菜、玉米和棉花的分割准确率分别提高了36.42,61.80和82.69个百分点。对比算法耗时可以看出,柱体空间聚类分割方法相比欧氏距离聚类方法耗时较少,算法耗时分别缩短为后者的9.98%,16.40%和9.04%,这与前者通过植株聚类中心有序实现植株个体分割有关。欧氏距离聚类分割结果通常存在过分割和欠分割的现象,不能达到预期效果,柱体空间聚类分割结果基本不存在上述现象,能够完全实现植株间的分离,从分割准确率和算法耗时2个方面来看,柱体空间聚类分割方法都优于欧氏距离聚类分割。
对比表5可知棉花群体植株均实现了正确分割,玉米和油菜分别有3和16株未被正确分割,本文方法对油菜、玉米和棉花3种作物的分割准确率分别为90.12%,96.63%和100%。玉米有3株未被正确分割的原因为部分矮小玉米植株点云数据信息不全或点云数过少,不能作为有效植株,在使用欧氏聚类分割计算聚类中心时被剔除。油菜群体点云分割准确率相对较低,这是由于花期油菜群体结构复杂,油菜根部有过多杂草和植株间的相互遮挡,造成内部油菜植株的茎秆点云缺损,在进行作物茎秆点云的欧氏聚类时,仅聚类了有效点云数量的茎秆点云数据,无法得到茎秆数据缺损植株的植株聚类中心。

表5 不同作物群体点云分割方法的结果对比
3 讨 论
本研究的目的是探讨田间作物群体中单个植株的分割提取方法。单个植株的提取与植株表型生长参数的测量密不可分,本文提出了一种适于农作物群体点云分割的柱体空间聚类分割方法,能够实现田间作物个体植株之间的分割,大幅提高了作物群体点云分割的精度。
本文方法适用于间隔播种且具有茎秆信息的农作物植株分割,目前田间作物大多采用间隔播种的方式,植株间有一定的间距可以充分利用光能,提高光能利用率,如油菜、玉米和棉花等作物。作物种植密度对分割结果有一定的影响,当种植密度较大时,存在植株交叉现象,仍旧可以通过茎秆中心点分割出不同的植株个体,但是边缘叶片数据会逐渐损失。如果目标植物不是单主茎作物,但只要茎秆信息完整,多个茎秆分支之间无严重断裂现象,仍旧可以聚类得到植株中心点,继而分割得到单个植株;若多个茎秆分支之间出现断裂现象,则会聚类得到多个中心点,可以通过设置阈值对多个中心点进行合并,并求取其平均值得到植株聚类中心点进行植株个体分割。
Jin等[29]基于区域生长算法从激光点云数据中分割出玉米个体,在稀疏、中等和稠密3种密度下的玉米个体分割结果召回率分别为0.95、0.93和0.92,通过对比试验田面积和玉米株数可以发现,本研究玉米种植密度介于上述中等和稠密密度之间,植株高度高于前者20~30 cm左右,玉米个体分割结果准确率为96.63%,除此之外,本研究方法应用于油菜、棉花等更多类型的农作物,均能得到良好的分割结果,具有较好的适用性。
该方法可基本实现植株个体之间的分割,但仍然存在一定的局限性,对于非间隔种植的田间作物,由于存在大量的叶片交叉,可能会导致分割精度降低,对于茎秆数据缺失的作物点云数据,无法提取植株聚类中心,也限制了该方法的使用。
4 结 论
1)针对传统点云数据聚类方法不能满足作物群体点云数据分割要求的情况,本文提出一种适用于田间作物群体点云数据分割的柱体空间聚类分割方法,实现了玉米、油菜和棉花3种作物个体植株之间的分割,证明柱体空间聚类分割方法具有一定的通用性,适用于具有一定种植间隔且含有茎秆器官的农作物。
2)与欧氏距离聚类分割的分割结果相比,柱体空间聚类分割方法能够解决过分割和欠分割问题,实现作物群体植株之间的分割,通过对比分割结果和人工统计株数,本文方法对油菜、玉米和棉花3种作物的分割准确率分别为90.12%,96.63%和100%,相对欧氏距离聚类方法准确率分别提高了36.42,61.80和82.69个百分点,且算法耗时缩短为欧氏距离聚类方法的9.98%,16.40%和9.04%。与区域生长算法的单体分割结果相比,本研究可应用于多种不同的农作物类型,适用性更强,不需要大量数据训练,耗时短。
本文基于植株聚类中心点建立柱体空间实现作物植株个体的准确分割,能够大大减少工作量,为作物群体表型信息研究提供了方法,可为农作物无损测量提供参考。
[1] 苏伟,蒋坤萍,郭浩,等. 地基激光雷达提取大田玉米植株表型信息[J]. 农业工程学报,2019,35(10):125-130.
Su Wei, Jiang Kunping, Guo Hao, et al. Extraction of phenotypic information of maize plants in field by terrestrial laser scanning[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(10): 125-130. (in Chinese with English abstract)
[2] Sun S P, Li C Y, Paterson A H, et al. In-field high throughput phenotyping and cotton plant growth analysis using LiDAR[J]. Frontiers in Plant Science, 2018, 9: 16.
[3] Goggin F L, Lorence A, Topp C N. Applying high-throughput phenotyping to plant–insect interactions: picturing more resistant crops[J]. Current Opinion in Insect Science, 2015, 9: 69-76.
[4] Grosskinsky D K, Pieruschka R, Svensgaard J, et al. Phenotyping in the fields: Dissecting the genetics of quantitative traits and digital farming[J]. New Phytologist, 2015, 207(4): 950-952.
[5] Rahaman M, Chen D, Gillani Z, et al. Advanced phenotyping and phenotype data analysis for the study of plant growth and development[J]. Frontiers in Plant Science, 2015, 6: 619.
[6] Cobb J N, DeClerck G, Greenberg A, et al. Next-generation phenotyping: requirements and strategies for enhancing our understanding of genotype–phenotype relationships and its relevance to crop improvement[J]. Theoretical and Applied Genetics, 2013, 126(4): 867-887.
[7] Guo Q H, Wu F F, Pang S X, et al. Crop 3D-a LiDAR based platform for 3D high-throughput crop phenotyping[J]. Science China Life Sciences, 2018, 61(3): 328-339.
[8] 赵春江. 植物表型组学大数据及其研究进展[J]. 农业大数据学报,2019,1(2):5-18.
Zhao Chunjiang. Big data of plant phenomics and its research progress[J]. Journal of Agricultural Big Data, 2019, 1(2): 5-18. (in Chinese with English abstract)
[9] 边黎明,张慧春. 表型技术在林木育种和精确林业上的应用[J]. 林业科学,2020,56(6):113-126.
Bian Liming, Zhang Huichun. Application of phenotyping techniques in forest tree breeding and precision forestry[J]. Scientia Silvae Sinicae, 2020, 56(6): 113-126. (in Chinese with English abstract)
[10] 刘建刚,赵春江,杨贵军,等. 无人机遥感解析田间作物表型信息研究进展[J]. 农业工程学报,2016,32(24):98-106.
Liu Jiangang, Zhao Chunjiang, Yang Guijun, et al. Review of field-based phenotyping by unmanned aerial vehicle remote sensing platform[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(24): 98-106. (in Chinese with English abstract)
[11] 张慧春,周宏平,郑加强,等. 植物表型平台与图像分析技术研究进展与展望[J]. 农业机械学报,2020,51(3):1-17.
Zhang Huichun, Zhou Hongping, Zheng Jiaqiang, et al. Research progress and prospect in plant phenotyping platform and image analysis technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(3): 1-17. (in Chinese with English abstract)
[12] 李鹏,劳彩莲,杨瀚,等. 基于移动机器人平台的玉米植株三维信息采集系统[J]. 农业机械学报,2019,50(S1):15-21.
Li Peng, Lao Cailian, Yang Han, et al. Maize plant 3D information acquisition system based on mobile robot platform[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 15-21. (in Chinese with English abstract)
[13] 郭彩玲,宗泽,张雪,等. 基于三维点云数据的苹果树冠层几何参数获取[J]. 农业工程学报,2017,33(3):175-181.
Guo Cailing, Zong Ze, Zhang Xue, et al. Apple tree canopy geometric parameters acquirement based on 3D point clouds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 175-181. (in Chinese with English abstract)
[14] 张漫,苗艳龙,仇瑞承,等. 基于车载三维激光雷达的玉米叶面积指数测量[J]. 农业机械学报,2019,50(6):12-21.
Zhang Man, Miao Yanlong, Chou Ruicheng, et al. Maize leaf area index measurement based on vehicle 3D LiDAR[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(6): 12-21. (in Chinese with English abstract)
[15] 杨斯,高万林,米家奇,等. 基于RGB-D相机的蔬菜苗群体株高测量方法[J]. 农业机械学报,2019,50(S1):128-135.
Yang Si, Gao Wanlin, Mi Jiaqi, et al. Method for measurement of vegetable seedlings height based on RGB-D camera[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(S1): 128-135. (in Chinese with English abstract)
[16] Crommelinck S, Hofle B. Simulating an autonomously operating low-cost static terrestrial LiDAR for multitemporal maize crop height measurements[J]. Remote Sensing, 2016, 8(3): 205.
[17] Paulus S, Schumann H, Kuhlmann H, et al. High-precision laser scanning system for capturing 3D plant architecture and analysing growth of cereal plants[J]. Biosystems Engineering, 2014, 121: 1-11.
[18] 郭新年,周恒瑞,张国良,等. 基于激光视觉的农作物株高测量系统[J]. 农业机械学报,2018,49(2):22-27.
Guo Xinnian, Zhou Hengrui, Zhang Guoliang, et al. Crop height measurement system based on laser vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 22-27. (in Chinese with English abstract)
[19] Mesas-Carrascosa F J, de Castro A I, Torres-Sanchez J, et al. Classification of 3D point clouds using color vegetation indices for precision viticulture and digitizing applications[J]. Remote Sensing, 2020, 12(2): 317.
[20] Wang Y W, Chen Y F. Non-destructive measurement of three-dimensional plants based on point cloud[J]. Plants-Basel, 2020, 9(5): 571.
[21] 喻垚慎,云挺,杨绪兵. 基于激光点云数据的植物器官多维特征分割方法[J]. 数据采集与处理,2015,30(5):1054-1061.
Yu Yaoshen, Yun Ting, Yang Xubing. Multi-dimension feature segmentation method of foliage organs based on laser point cloud data[J]. Journal of Data Acquisition and Processing, 2015, 30(5): 1054-1061. (in Chinese with English abstract)
[22] 邢万里,邢艳秋,黄杨,等. 基于体元逐层聚类的TLS点云数据单木分割算法[J]. 中南林业科技大学学报,2017,37(12):58-64,71.
Xing Wanli, Xing Yanqiu, Huang Yang, et al. Individual tree segmentation of TLS point cloud data based on clustering of voxels layer by layer[J]. Journal of Central South University of Forestry & Technology, 2017, 37(12): 58-64, 71. (in Chinese with English abstract)
[23] Xia C L, Wang L T, Chung B K, et al. In situ 3D segmentation of individual plant leaves using a RGB-D camera for agricultural automation[J]. Sensors, 2015, 15(8): 20463-20479.
[24] Gélard W, Devy M, Herbulot A, et al. Model-based segmentation of 3D point clouds for phenotyping sunflower plants[C]//12. International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications, 2017: 459-467.
[25] 温维亮,郭新宇,杨涛,等. 玉米果穗点云分割方法研究[J]. 系统仿真学报,2017,29(12):3030-3034,3041.
Wen Weiliang, Guo Xinyu, Yang Tao, et al. Point cloud segmentation method of maize ear[J]. Journal of System Simulation, 2017, 29(12): 3030-3034, 3041. (in Chinese with English abstract)
[26] Wu G, Zhu Q B, Huang M, et al. Automatic recognition of juicy peaches on trees based on 3D contour features and colour data[J]. Biosystems Engineering, 2019, 188: 1-13.
[27] Sun S P, Li C Y, Chee P W, et al. Three-dimensional photogrammetric mapping of cotton bolls in situ based on point cloud segmentation and clustering[J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2020, 160: 195-207.
[28] Zermas D, Morellas V, Mulla D, et al. 3D model processing for high throughput phenotype extraction-the case of corn[J]. Computers and Electronics in Agriculture, 2020, 172: 105047.
[29] Jin S C, Su Y J, Gao S, et al. Deep learning: Individual maize segmentation from terrestrial lidar data using faster R-CNN and regional growth algorithms[J]. Frontiers in Plant Science, 2018, 9: 866.
[30] 陈向阳,杨洋,向云飞. 欧氏聚类算法支持下的点云数据分割[J]. 测绘通报,2017(11):27-31,36.
Chen Xiangyang, Yang Yang, Xiang Yunfei. Measurement of point cloud data segmentation based on Euclidean clustering algorithm[J]. Bulletin of Surveying and Mapping, 2017(11): 27-31, 36. (in Chinese with English abstract)
Cylinder space segmentation method for field crop population using 3D point cloud
Lin Chengda, Han Jing, Xie Liangyi, Hu Fangzheng
(,430070,)
A new phenotype of crop population depends mainly on the internal genetic change of plants with environment, thereby determining new varieties of crops in farmland. A three-dimensional (3D) laser scanning technology can provide a rapid acquisition for the accurate phenotypic data of crops, compared with some traditional time-consuming and destructive measurements. However, field high-throughput phenotypic acquisition is still a major bottleneck limiting crop improvement and precision agriculture. It is also necessary to automatically acquire phenotypic traits throughout the growth cycle of crops and further to obtain target parameters with high accuracy. In this study, a cylinder space clustering segmentation was proposed for a highly efficient extraction on complete phenotypic parameters of a single plant in field crop population using a 3D point cloud. Field experiments were carried out at the Huazhong Agricultural University in Wuhan City, Hubei Province of China in 2019. Flowering rapeseed, seedling corn, and flowering cotton were selected as the research objects. The experimental procedure was: 1)A 3D laser scanner(FARO FocusS SeriesS 70) was used to collect high-precision point cloud data of field corn, rapeseed and cotton. Multiple sites were set around the experimental field for high accuracy information about the target. The measuring sites of rapeseed field were laid in the four corners and the middle of the long side of a sample plot. Four corners of a sample plot were selected to measure in corn and cotton field. Two groups of point cloud data were collected at different heights in the same measuring site. Each position was scanned once, and each scanning took 10 min. At least 3 target balls were placed in the test area as the registration basis, thereby preparing for the registration of point cloud data collected by subsequent test stations.2) The crop target was then extracted from the massive point cloud, including registration, denoising, data extraction, and simplification. The point cloud registration was completed using a target ball. The noise points were eliminated using dark scan point, outlier, and edge artifact filter. A Hue Saturation Intensity(HSI) color model was utilized to extract crop group target, according to the difference between crop and soil color. Curvature sampling was selected to realize point cloud simplification. 3)A pass-through filter was used to extract the stem point clouds at a certain height, whereas, the leaf point clouds were removed according to the difference of normal vectors. Conditional Euclidian distance was selected to extract the cluster center point of each plant using stem point cloud. A cylinder spatial model with the center point was also established to segment the point cloud of each plant. The column radius and height were set according to the row spacing and growth of specific crops in farmland. The segmentation accuracies of corn, rapeseed, and cotton were 90.12%, 96.63%, and 100%, respectively. The accuracy increased by 36.42, 61.80 and 82.69 percentage points, respectively, while the running time shortened to to 9.98%, 16.40% and 9.04%, compared with the conventional clustering segmentation. As such, better applicability, feasibility, and universality were achieved to effectively segment and extract all three types of individual plants from crops in dense fields, compared with previous region growth. Therefore, the segmentation and recognition of a single plant in crop population can provide a promising technical approach for the accurate, rapid, and non-destructive measurement of phenotypic information of individual crop in the field.
crops; laser; three dimensional point cloud; cylinder space model; segmentation
2020-12-10
2021-02-20
国家自然科学基金项目(41301522);中央高校基本科研业务费专项(2662018JC054);湖北省自然科学基金项目(2014CFB940)
林承达,博士,副教授,研究方向为数字农业三维重建。Email:linchengda@mail.hzau.edu.cn
10.11975/j.issn.1002-6819.2021.07.021
TP391
A
1002-6819(2021)-07-0175-08
林承达,韩晶,谢良毅,等. 田间作物群体三维点云柱体空间分割方法[J]. 农业工程学报,2021,37(7):175-182. doi:10.11975/j.issn.1002-6819.2021.07.021 http://www.tcsae.org
Lin Chengda, Han Jing, Xie Liangyi, et al. Cylinder space segmentation method for field crop population using 3D point cloud[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(7): 175-182. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.07.021 http://www.tcsae.org
猜你喜欢
江西农业大学学报(2022年3期)2022-07-07 04:00:52
海洋工程(2021年1期)2021-02-02 02:48:12
水下无人系统学报(2020年1期)2020-03-06 09:52:32
农业机械学报(2019年4期)2019-04-29 02:20:48
畜牧与饲料科学(2018年5期)2018-06-13 12:03:48
高中生学习·高二版(2017年9期)2017-10-25 06:46:21
凿岩机械气动工具(2017年2期)2017-07-19 10:21:14
自然资源遥感(2014年3期)2014-02-27 11:56:33
探索地理(2013年5期)2014-01-09 06:40:44
土壤与作物(2013年3期)2013-03-11 18:47:31