
火箭飞行时串测试误差分析研究
2021-06-30 14:43:48曹梦磊张义超南京宏
计算机测量与控制 2021年6期
曹梦磊,张义超,南京宏,陈 益
(北京宇航系统工程研究所,北京 100076)
0 引言
运载火箭飞行时串是火箭飞行过程中按照时间序列输出的一系列指令参数。这些指令以箭载计算机(简称箭机)输出的关机时间(一般代号为Tk或Tks)为基准,经过指定的时间延时后发出,一般用来控制主发动机、姿控发动机等动力系统的阀门、火工品,或者分离解锁机构产生动作,以完成在轨飞行控制、星箭分离等功能[1-2]。主发动机点火、星箭分离等关键动作的产生均需要精确的时间序列保证。因此,飞行时串的精确发出是保证火箭正常飞行的前提。一般在火箭出厂及发射前要对其进行多轮测试,判读飞行时串的输出精度是否满足要求。
目前,火箭在出厂测试及飞行任务数据分析过程中,通过测试数据计算飞行时串的输出误差,采用同一个判读依据满足不大于指定的时间即可,并未对数据判读得到的时串误差来源进行分析,不利于对火箭飞行状态的准确评估。张涛等[3]分析了计数器累加计数方案对时串信号采集误差的影响;茅永兴、黄琼、孙海峰、娄广国[4-7]等针对火箭飞行时串指令实时处理方法、判读方法提出了改进优化、辅助判读等方法;张拓、江良伟等[8-11]提出一种基于FPGA的时序控制器,并针对温补晶振进行了时序精度测试与分析;刘琨、马雪松、王少桦等[12-16]设计了一种运载火箭时序仿真测试系统,并对该仿真系统时序信号的时间精度等级进行了检定;宋征宇、周恒保[17-18]提出了时序系统“标准型”的设计方案和新一代火箭时序控制系统方案;柳振民等[19]针对火箭飞行时串指令参数进行数据处理时的误码率影响提出了处理过程预设条件修正法、参数结果关联替代修正法两种误码修正方法。综上所述,目前的研究还缺乏从飞行时串的输出测试全链路进行误差分析,本文针对火箭出厂测试和飞行任务中产生的飞行时串测试判读数据进行全链路误差分解,基于飞行时串输出工作原理,从箭机输出Tks指令,到总线传输、地面CPCI采集和遥测采集的全链路进行误差来源分析,并通过某发任务运载火箭的实测数据验证误差分析的合理性,最后给出飞行时串测试误差判读的参考依据。
1 飞行时串输出原理
火箭飞行时串输出系统主要由箭机、综合控制器、电阻盒及输出线路组成。箭机中运行飞行控制软件,飞控软件首先根据飞行控制要求计算输出关机时间指令(Tks),根据Tks指令和装订的飞行时序表得到飞行时串输出指令,将该指令通过1553B总线发送给综合控制器进行译码输出,最后通过电阻盒及其线路控制姿控喷管、火工品和电磁阀等被控对象产生动作。
箭机一般采用三冗余设计,具有3个主处理器和总线控制器,作为BC挂在1553B总线上。综合控制器采用三取二冗余设计,3个CPU作为3个独立的RT挂在总线上,分别通过总线接收箭机(BC)发出的飞行时串输出控制码,经各自译码后三取二输出飞行时串。固体继电器板接收分别由三块主机板输出的时序信号,三路信号控制5个固体继电器,输出时采用继电器三取二逻辑输出设计。
在火箭出厂测试时,有4种途径可以获得飞行时串测试数据,如图1所示。第一种是通过箭机发给综控器的总线数据,遥测系统监听总线上的时串指令获得;第二种是通过电阻盒上连接地面时串电缆,地面CPCI组合对输出电压采样获得;第三种是通过遥测系统对电阻盒输入端的模拟电压进行采样,经遥测编码传输至地面数据处理设备获得;第四种是通过综控器对输出的模拟电压信号进行回采并通过总线发送给箭机,遥测系统监听总线数据获得回采的时串指令。
其中第一种和第四种途径获得的飞行时串指令在箭机与综控器之间传输,没有贯穿输出全链路,一般作为发生故障时辅助判读排故使用。因此,在火箭出厂测试时主要对地测时串和遥测时串进行判读,在飞行任务时对遥测时串进行判读。
2 飞行时串判读方法
由以上飞行时串输出原理分析可知,飞行时串以箭机计算的Tks(或者基础级箭机计算的Tk)为基准,经过指定的时间延时后发出。因此飞行时串测试数据的判读方法为:首先将遥测或地测途径获得的飞行时串绝对时间减去距离当前时刻最近的Tks时间,得到飞行时串的浮动时间,然后将飞行时串浮动时间减去理论浮动时间得到浮动时间偏差,以此浮动时间偏差作为飞行时串的测试误差,飞行时串判读表如表1所示。
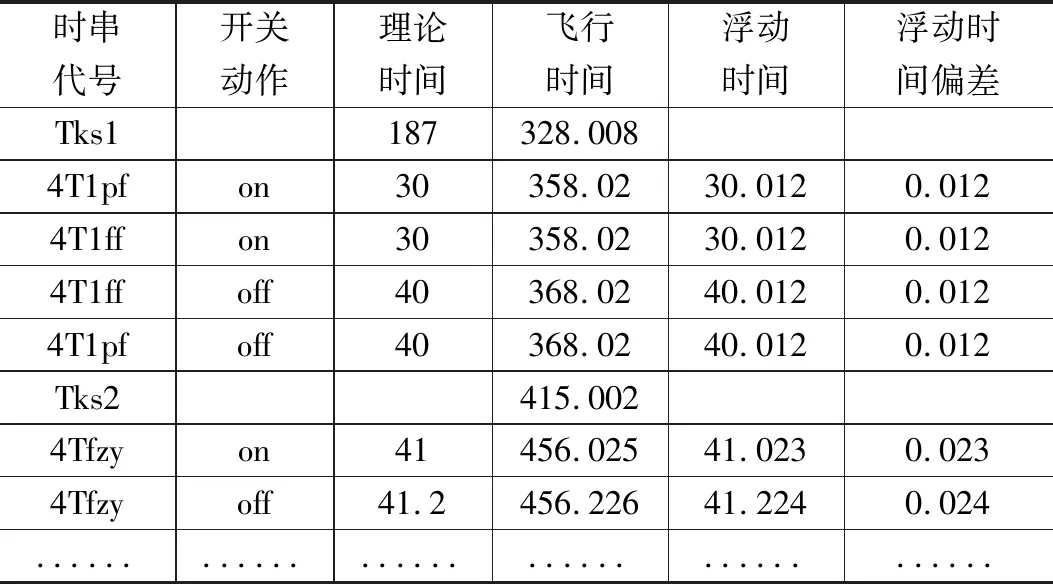
表1 飞行时串判读表
假设表中飞行时串序列号为j,距离其最近的计算机关机时间为Tksi,则第j个飞行时串对应的测试误差计算公式为:
Dj=Bj-Tksi-Aj
(1)
其中:Dj为第j个时串的浮动时间偏差,Bj为第j个飞
行时串的飞行时间,Aj为第j个飞行时串的理论时间。
3 控制系统地面测试误差分析
3.1 飞行控制软件周期延时
火箭控制系统飞行软件以一定的控制周期完成惯组数据解析、制导姿控计算、飞行时串指令输出等功能,飞行时控制周期中断服务程序主流程如图2所示。

图2 飞行软件周期内中断服务主流程图
在一个软件周期内,飞行软件首先完成飞行时串指令的输出,然后再完成制导、姿控的计算,即在一个控制周期内需要完成当前周期飞行时串指令的输出,以及制导解算输出下一周期的Tks时间。假定火箭的控制周期为20 ms,若飞行时串恰好在Tks时刻输出,则会产生一个控制周期20 ms的延时。
3.2 总线传输延时
火箭控制系统数据总线一般采用高可靠、双冗余的1553B数据总线,总线传输介质为双绞双屏蔽线缆,总线的两端设置匹配电阻,确保总线安全可靠[20]。总线拓扑结构如图3所示。

图3 控制系统1553B总线拓扑示意图
主干总线与分支总线采用变压器耦合方式,确保主干总线的可靠性。为避免总线在异常条件下引起通讯阻塞,总线负载率设计为不大于30%,总线负载率较低,有足够的裕度。1553B总线消息最小间隔时间2~4 μs,远程终端响应有效指令字的响应时间4~12 μs,并且在总线协议中设置RT无响应超时时间(一般20 μs左右),因此时串指令在1553B总线中传输延时最大在几十微秒左右,在时串误差判读时可以忽略。
3.3 固态继电器传输延时
综控器一般由电源板、主机板、固态继电器输出板及底板组成,如图4所示。采用三冗余设计,内嵌相互独立的三套总线RT接口和主CPU控制电路,信号输出采用三取二表决输出方案。综合控制器设计自检测功能,可对本机二次电源和输出时串进行测量,并将结果送到1553B总线上。信号三取二表决输出电路通过有3个CPU控制的5只四封装固体继电器串并联完成。固态继电器为四路常开直流输出固体继电器,固体继电器的常值输出电流为7 A,在过载情况下(小于100 ms)时能保证最大输出电流50 A,响应时间为60~3 000 μs。因此,考虑输出线路上容性负载和感性负载的影响,在时串判读时固态继电器电路传输延时应不大于10 ms。

图4 固态继电器输出电路示意图
3.4 地面CPCI采样延时
地面CPCI组合通过时串电缆接收电阻盒输出的模拟电压信号,通过采样电路进行采样转换为数字量,如图5所示,时串信号首先经过光耦隔离接口电路进入CPCI组合内采样。在接口电路中,所采用的光耦隔离器传输延时最大为5 μs,在飞行时串测试误差判读时可以忽略。地面CPCI组合内部采用中断处理对飞行时串信号即时采样,中断响应和数据处理产生的误差延迟在几十微秒左右,因此在飞行时串判读时此部分误差可忽略。
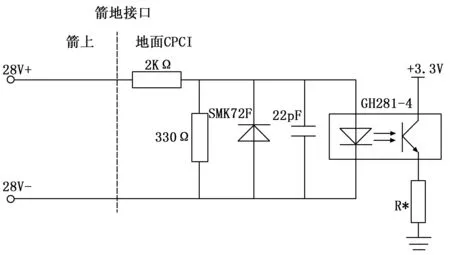
图5 地面CPCI飞行时串信号采集接口电路图
4 遥测系统测试误差分析
4.1 采样误差分析
遥测系统通过数字量变换器采用位控方式完成飞行时串的测量,数字量变换器采用光电耦合器隔离后进行指令状态的传输,遥测指令接口根据选用的光耦选择合适的接口电阻,接口加保护或消弧的反向二极管,并加适当的抗干扰电容,接口电路如图6所示,其中飞行时串带电指令信号幅度28 V±3 V。
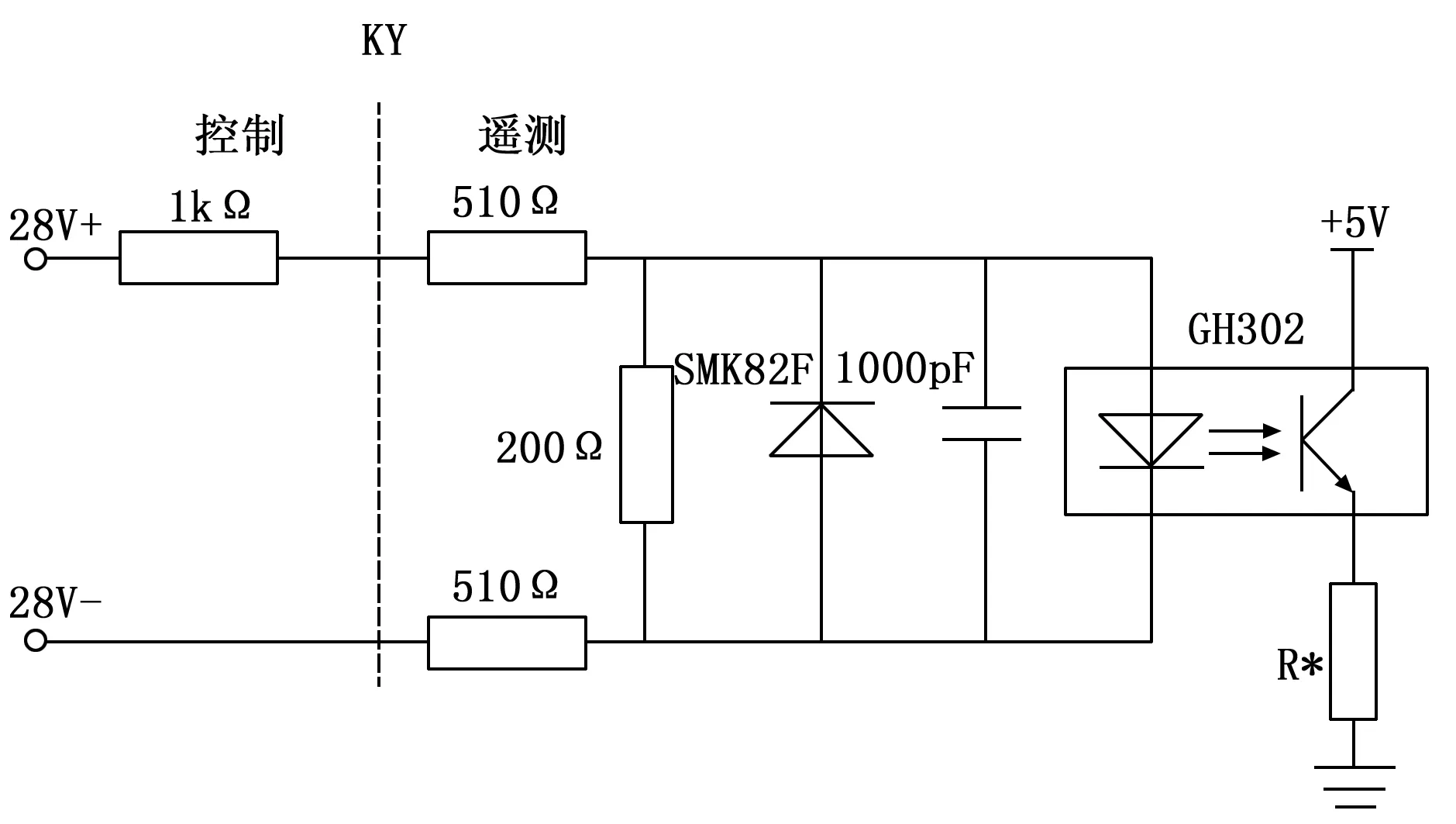
图6 飞行时串遥测采样接口电路示意图
在接口电路中,所用的光耦隔离器传输延时最大为5 μs,在飞行时串测试误差判读时可以忽略。因此,在数字量变换器对飞行时串测量过程中,主要测试误差来源于对时串指令的采样频率。假定火箭遥测系统采样频率40 Hz,则在采样频率40 Hz的作用下飞行时串采样误差最大为25 ms,如图7所示,即飞行时串指令刚好在采样脉冲上升沿之后发出。根据飞行时串指令输出的时刻不同,遥测采样误差一般在0~25 ms之间。

图7 遥测时串最大误差采集示意图
4.2 编码传输误差分析
数字量变换器将采集完的指令信号送中心程序器,利用码同步变换输出的路同步信号编程产生寻址各个波道的地址信号,每个路同步对应8位指令状态信息,按照规定的波道顺序依次传出,经中心程序器帧格式编码后传输至地面,中心程序器送数字量变换器帧同步信号和移位脉冲信号对时串指令和其他数字量指令进行编码传输,帧同步、移位脉冲和PCM数据传输时序关系如图8所示。
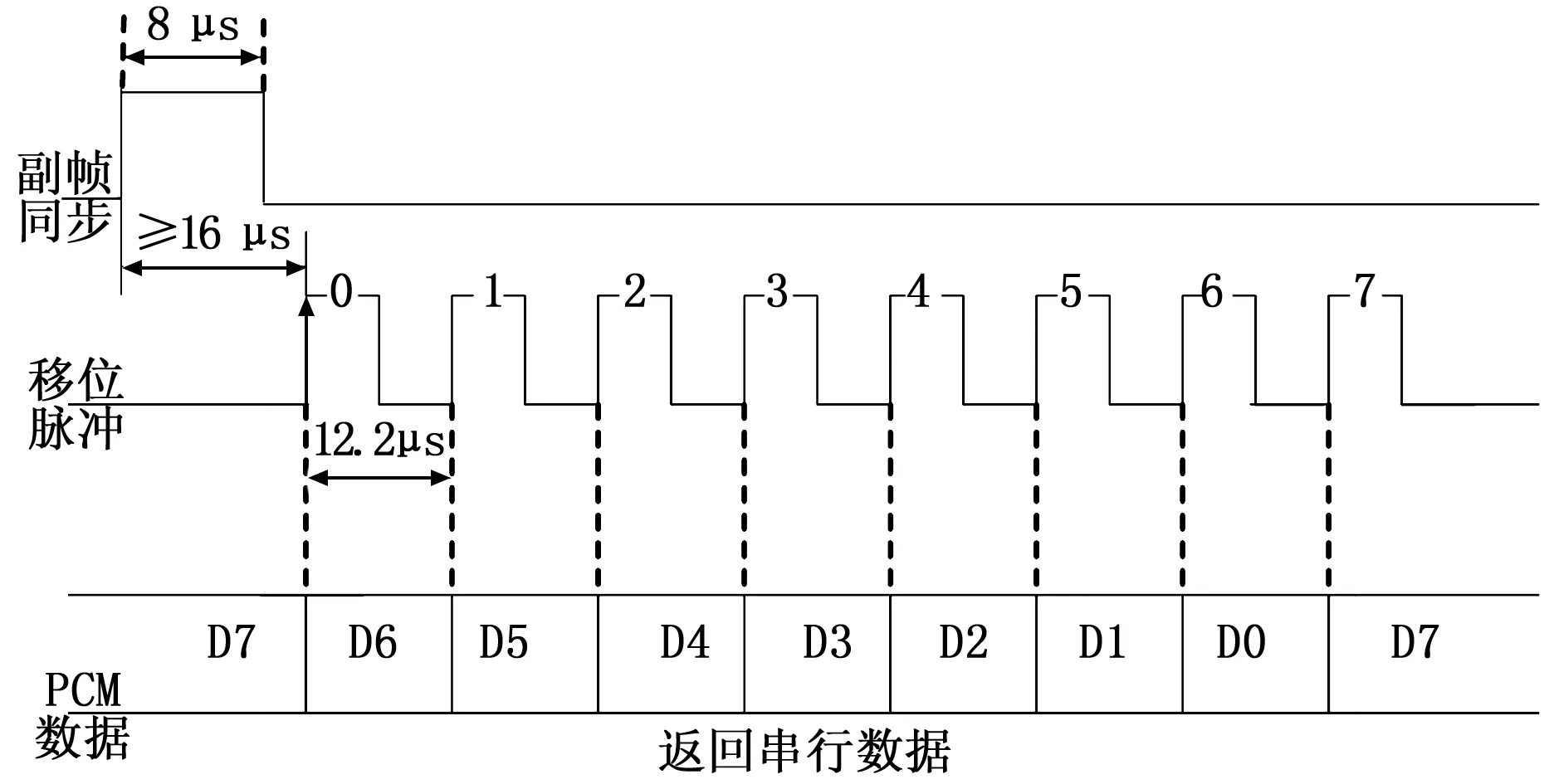
图8 数字量变换器与中心程序器接口时序图
数字量变换器利用移位脉冲上升沿送数,中心程序器利用移位脉冲的上升沿读取数据。数字量变换器发送完本字节之后,自动将下一字节的D7位送到数据线上。假定移位脉冲信号波特率为81.92 kHz,由此可得移位脉冲信号对一个波道(8位)采样带来的传输延时如公式(2)所示:
(2)
假定全帧中共包括64组码同步信号,波道间隔由中心程序器对数字量端口的选中时间编排决定,64组移位脉冲按照对应的编排顺序分别对相应的波道采样,64路数字量信号波道编排如表2所示,其中第56路波道T55代表飞行时串指令所在的波道。
表2 数字量信号波道编排表
中心程序器同时再将64路数字量信号作为一个副帧(代号C41),按照表3所示编排在由48个副帧组成的主帧中。
表3 中心程序器全帧编排表
因此,假如一个飞行时串指令在数字量信号波道对应的T55波道中,由遥测系统的帧同步频率40 Hz可知飞行时串指令在全帧编码传输过程中最大延时为25 ms,根据飞行时串指令在帧格式中编排位置和传输顺序的不同,遥测编码传输误差一般在0~25 ms之间。
4.3 误码传输误差分析
在飞行任务中,由于天地传输无线链路不可避免受到各种干扰因素的影响,会出现或多或少的误码率,如果恰好
注1:C41表示数字量变换器传输的1个副帧波道。
注2:ZXD、S100、D65、D61-64、D66等代号表示Wi副帧波道对应的采样数据。
在时串发生时刻出现误码则会导致时序判读存在漏判,或者由于误码引起的丢帧造成飞行时串的缺失或延迟,从而带来飞行时串的判读误差,如图9所示。此误差量级需根据误码率的大小及误码发生的时刻决定。
图9 误码率传输误差发生示意图
随着数据处理技术的发展和改进,提出了很多消除误码率影响的时序判读方法[15],而且在火箭飞行时序动作比较密集的时段测控条件一般较好,因此在飞行任务中的飞行时串测试数据判读时,需根据测控站对遥测数据的误码评估情况,根据具体任务测控数据处理结果考虑误码率延时的影响。
4.4 起飞信号接收误差分析
控制系统接收基础级发出的起飞信号,并通过光耦隔离接口转发给测量系统。由于光耦延时很小(几微秒)两者接收误差可以忽略。但是遥测系统事后地面数据处理时需找出起飞(QF)信号,然后通过时码模块以QF信号为零点基准打时标,如图10所示。所以测量系统时码器打时标的参考QF信号相对控制系统实际使用的QF信号是有延时的。由以上4.1、4.2节分析可知,由于采集频率和编码传输带来的最大延时为50 ms,由此给飞行时串判读带来的误差范围为-50~0 ms。
图10 遥测数据地面打时标处理过程示意图
4.5 时统误差分析
火箭飞行过程中,需要地面多个测控站以及测控船的接力保障测控覆盖性,如果测控站之间地面时统存在误差,则各个测控站对分段接收的数据合成处理后会产生误差。一般在执行飞行任务前航区测控站均会进行测控演练,各测控站之间完成时间同步,因此,此误差大小受地面测控站时间同步误差和各测控站之间时钟漂移误差大小的影响,需视具体任务情况分析。
5 飞行时串实测数据分析
本文以某型号运载火箭一次飞行任务及出厂测试的数据为例(如图11、图12所示),进行飞行时串误差分析,其中箭上遥测采集频率为40 Hz,遥测传输码速率1 Mb/s,控制系统软件周期20 ms,tk2,tk3为运载火箭基础级计算机关机时间,tkS1,tkS2,tkS3,tkS4,tkS5,tkS6为运载火箭上面级计算机关机时间。
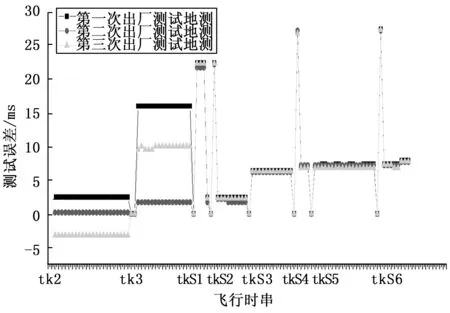
图11 运载火箭某次任务地测误差
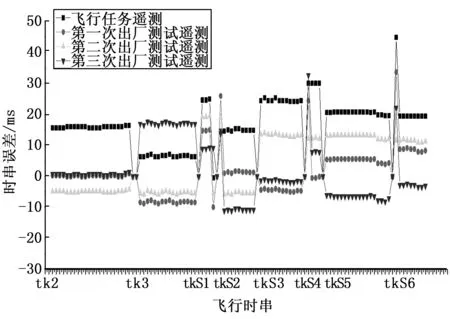
图12 运载火箭某次任务遥测误差
由以上测试数据分析可以得出:
1)飞行时串的地测数据误差比较稳定,只有在Tks时刻发出的飞行时串误差较大(大于20 ms),原因为Tks时刻的飞行时串滞后一个控制周期20 ms的影响,而Tks之后的时串误差均在10 ms以内。其中Tks1时刻之前的测试数据出现负偏差的情况,是由于在地面测试时采用地面计算机模拟基础级火箭发出起飞、计算机关机(Tk)信号,箭上接收到的起飞、Tk和地面发出的信号存在基准偏差导致。
2)飞行时串的遥测数据误差具有一定的随机性,但每一个Tks后面的时串测试误差比较稳定,且在50 ms以内,说明在测试误差的影响因素中遥测系统采样误差和编码传输误差占主要影响。
3)由于遥测系统与箭上控制系统起飞零点的误差导致飞行时串输出误差存在负偏差的情况。与每一个Tks基准之后遥测采集引起的延时偏差累计,造成有的Tks之后飞行时串输出负偏差,有的输出正偏差。
4)飞行任务中的时串偏差较地面出厂测试时的误差较大,原因为飞行任务时会存在误码率、测控站之间地面时统误差的影响。因此,在制定飞行时串测试误差判据时应考虑误码率、地面站时统误差等不可控因素的影响。
6 结束语
本文分析了火箭飞行时串输出原理,根据地测判读和遥测判读两种途径获得的测试数据进行误差来源分解,最终得出控制系统软件周期、固态继电器输出延时误差、遥测采样编码误差和起飞信号接收误差为飞行时串判读的主要误差来源。通过此误差分析得出为减少飞行时串的测试误差,可有以下几种途径:
1)提高遥测系统采样频率和传输码速率,减小遥测采集传输误差。
2)提高控制系统软件工作频率,减小飞行控制软件周期误差。
3)在飞行时序设计时,尽量避开Tks时刻输出飞行时串。
4)飞行任务尽量保障良好的测控条件,提高无线链路裕量,减小传输误码率,有利于减小时串判读误差。
猜你喜欢
科普童话·神秘大侦探(2023年1期)2023-05-30 12:48:10
自动化仪表(2020年10期)2020-11-13 03:31:00
电子制作(2019年11期)2019-07-04 00:34:40
测控技术(2018年5期)2018-12-09 09:04:26
电子测试(2018年18期)2018-11-14 02:30:34
电子测试(2018年13期)2018-09-26 03:30:00
现代工业经济和信息化(2016年6期)2016-05-17 05:36:13
船舶力学(2015年6期)2015-12-12 08:52:20
汽车维护与修理(2014年10期)2014-02-28 12:15:01
机电信息(2014年27期)2014-02-27 15:53:56
