
地图空间认知的数学基础
2021-06-29 00:26武易天
测绘学报 2021年6期
万 刚,武易天,2
1. 航天工程大学航天信息学院,北京 101416; 2. 航天工程大学研究生院,北京 101416
空间认知作为人类智能的重要组成部分,是人类大脑的核心能力之一。在漫长的人类进化过程中,人的空间认知能力不断得到提升和加强。地图作为人类学习和观察现实世界的一种工具,极大增强了人们对空间环境的感知效果。基于此,高俊院士提出了“地图是人类空间认知工具”这一著名论断[1],地图空间认知理论也成为地图学与地理信息系统学科的重要基础理论。但是从数学的角度对地图空间认知理论进行的研究还较少,现有成果大多以概念、框架、流程等定性描述为主,缺少强有力数学理论支撑的地图空间认知理论,面对蓬勃发展的地图学已经显得力不从心,急需建立体系化的数学模型从而更好地支撑地图学科的深入发展。随着大数据、知识图谱和认知计算等技术的兴起,人类社会对时空信息的需求日益多样化,地图的概念、产品均发生了显著变化,人在使用地图产品过程中的主体地位和思维过程愈发受到关注,更需要从数学的角度对地图空间认知过程进行建模和分析。
本文沿着地图学发展脉络,对地图空间认知理论的发展及现状进行梳理,指出了地图空间认知理论研究对象的变化,重点对心理物理学模型、感知相似性模型、时空信息体系模型、智能感知制图模型给出归纳和分析,为地图空间认知研究提供一个新视角。
1 地图空间认知理论概述
1.1 地图空间认知理论的发展过程
地图空间认知是人们借助地图,认识自己赖以生存的环境,包括其中的诸事物、现象的位置、空间分布、相互关系,以及变化和规律[3]。地图空间认知可以理解为研究用地图学方法实现制图者对地理空间的先验认知,进而帮助读图者构建起地理空间认知的一种理论,即包括制图者的空间认知和读图者的空间认知。地图、人、实地及相互关系是地图空间认知理论的研究对象。随着地图学的发展,地图空间认知理论的体系和结构也在不断变化,与地图设计、虚拟地理环境、地理信息系统、时空大数据和智能地图等方向研究关联密切。
地图设计是国内从制图者角度研究地图空间认知的起点。地图设计从依靠传统经验发展为依据理论指导,核心内容是通过选择最佳的地图要素表示方法,提升读者的时空感知能力并且降低其认知负担。20世纪80年代,地图设计者首先在地图视觉感受、地图符号设计上开展地图空间认知理论研究[2-4];文献[5]探讨了心像地图在地图设计过程中的重要作用、心像地图建立的方法等问题;文献[6]指出制图综合中运用的视觉思维包括:视觉选择性思维、视觉注视性思维、视觉结构联想性思维,这些视觉思维过程就是地图空间认知中的认知制图过程;文献[7]进行了电子地图视觉认知试验,目的是指导电子地图的设计,其团队在国内较早使用眼动试验数据分析地图空间认知模式[8-10];文献[11]指出路网构架图、面域拓扑图、赛博网络图均是适宜空间认知结果表达的地图新形式;文献[12]指出行为试验、眼动试验及脑认知成像相结合的组合试验方法可能是今后地图学认知试验研究的方向;文献[13—15]认为眼动试验可以为解释地图认知过程提供一个定性和定量的依据;文献[16—19]开展了基于视觉注意与眼动跟踪相结合的地图认知计算模型研究,并已开展基于脑认知成像的地图空间认知试验。
地理信息系统和虚拟地理环境是传统地图学科的发展和延伸,需要从制图者和读图者相统一的角度进行地图空间认知研究。文献[20]从面向对象的方法论角度认为空间认知理论是地理信息系统方法论的理论依据;文献[21]提出,在虚拟地理环境中,视觉、听觉、触觉和嗅觉等各种生理刺激能够帮助用户构建对环境的感觉和认知;文献[22]提出虚拟地形环境仿真是数字地图支持下的一种新的空间认知工具,虚拟地形环境设计应充分利用人类的感觉通道,使用户产生准确的生理认知和心理认知;文献[23]提出发展地球空间与宇宙空间相统一、宏观到微观世界相协调的全空间地理信息系统;着眼大数据时代下地理信息系统的发展,文献[24]认为地图学相应的科学范式、时空信息传输和认知模型都需要更新;文献[25]提出地理场景学的概念,指出要发展兼顾时空分布、演化过程和要素相互作用的场景自适应综合与多模式展示的表达模型;近几年人工智能技术深化及类脑型芯片的出现,给空间数据的存储和计算研究带来新的机遇,设计更加符合人类空间认知规律的新型地理信息系统愈发受到关注。
1.2 地图空间认知中研究对象的变化
高俊院士曾指出,地图学的发展过程和研究对象沿着地图学三角形向地图学四面体演变[26],如图1所示。从地图空间认知理论来看,地图学三角形模型中的地图(代指纸质地图和沙盘等)、读者、实地正是3个重要的地图空间认知研究对象,“地图—读者”“地图—实地”“读者—实地”三组关系构成了地图空间认知理论的重要研究内容;地图学四面体模型中增加了数字地图(代指虚拟地理环境和地理信息系统等)对象,又增加了“数字地图—读者”“数字地图—实地”“数字地图—地图”三组关系。
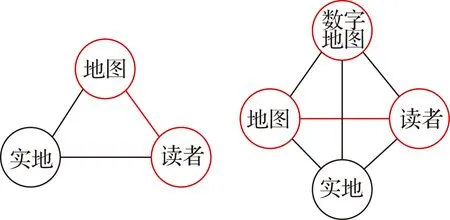
图1 地图学三角形和地图学四面体模型[26]Fig.1 Cartographic triangle and tetrahedron model[26]
高俊院士随后提出“新地图”的概念[27],指出突破传统习惯的地理空间将以多种形式向表达多维空间、意识空间、网络空间、赛博空间的目标发展。本文认为,地图空间认知理论必须面向新地图的需求,研究对象可以进一步概括为新型的“人—地图—环境”三角形,如图2所示。“人”包括自然人和机器人等智能平台;“地图”包括各类地图产品和各类时空信息系统;“环境”包括现实和虚拟的各类型环境;其中①“人—地图”关系,研究如何设计满足人和机器人需求的各类型时空信息产品,如地图设计、虚拟地理环境设计等;②“人—环境”关系,研究人和机器人如何在各类虚拟和真实环境中实施空间行为,如智能感知等;③“地图—环境”关系,研究时空信息系统如何准确建设和表示各类型环境,如GIS数据模型等。
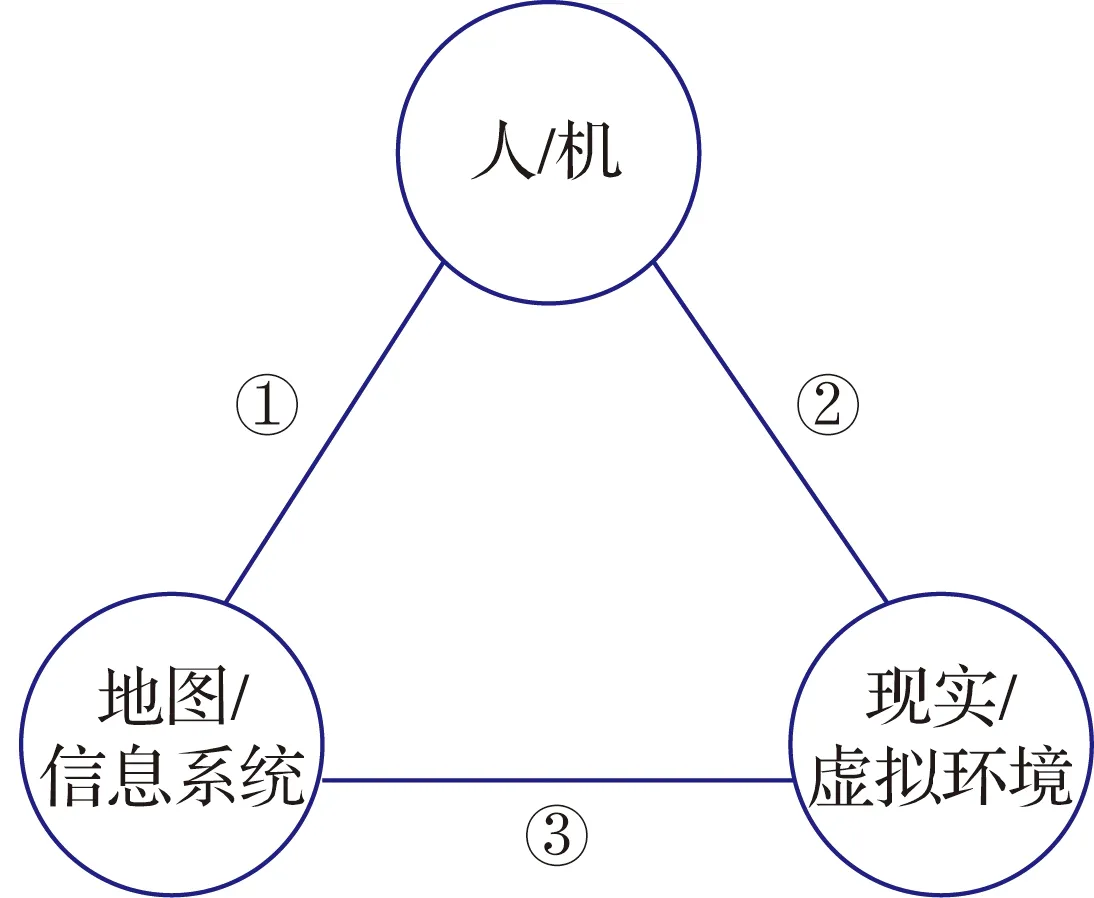
图2 “人—地图—环境”地图空间认知三角形模型Fig.2 Human-map-environment map spatial cognition triangle model
2 地图空间认知理论的数学模型初探
在地图学不同的发展阶段,地图空间认知理论发挥作用的侧重不同,也形成了一系列较为清晰的概念模型,但整体上看,其数理逻辑尚不明确,缺少对地图空间认知基本度量的定义、地图空间认知过程的函数表达、地图空间认知编码-转换-解码的结构,以及空间行为的数据采集和分析等,制约着地图空间认知理论的深入发展。本文重点对地图空间认知中几类主要数学模型进行分析。
2.1 心理物理学模型
这一组模型以地图设计为代表,主要研究“人—地图”之间的关系。自20世纪50年代开始,国外地图学家以刺激-反应(S-R)理论为基础,对地图符号与构图进行了初步的定量研究。20世纪70年代,地图工作者借用心理物理学方法探索图形感受的规律,统计分析不同读者观察各种地图符号的感受效果。主要数学模型有感觉定量化模型、信息熵评价分析模型、量表模型和眼动分析模型等。
2.1.1 感觉定量化模型
1834年德国生理学家Weber发现刺激的差别阈值是刺激本身强度的线性函数[28]。1860年德国心理学家Fechner指出心理感受量的增长比物理刺激量的增长要慢,因此他认为心理感受量s(I)与物理刺激量I之间存在对数关系[28],即费希纳定律
s(I)=alog(I+I0)+b
(1)
式中,S是感觉量值;I为初始刺激量;I0为初始噪声;a和b是由量表单位决定的常数。美国心理学家Stevens进一步指出感觉量是刺激量的幂函数[29]
s(I)=aIp+b
(2)
式中,p是由刺激强度决定的幂指数。基于此定律,文献[30]探讨了心理物理学定律在顺序量表符号设计中的应用;文献[31]基于色知觉的主观评价法、基于测量值的测色评价法、基于嗜好色的记忆评价法、基于解析测度的客观评价法、基于统计测度的客观评价法等对颜色的再现做出定量的评价。
2.1.2 基于信息熵的设计评价模型
文献[32]提出了一个制图信息传输模型,用于描述地图的信息传输特征。由于该模型传输过程缺乏定性描述,地图学者尝试在地图设计和评价时引入信息熵概念。文献[33]给出信息熵的定义,证明消除信息不肯定性的大小可以用来表示信息量的大小。对于有xi种状态,其概率相应为Pi的事件X来说,其平均信息量用H(X)表示
(3)
文献[34]在熵理论和地图分级评价模型上,提出了基于熵的彩色晕渲图设色方法,通过引入最大熵和剩余熵评价地图高程带划分效果。文献[35]将城市近郊用地类别等同于信息类别,从而利用熵函数表示城市景观紊乱度。文献[36]将眼动数据和鼠标使用的时长、次数和尺寸类型经过熵权法整合,用于计算用户的兴趣度。但由于地图是以时空关系反映客观存在的,地图上的要素符号本身是固定的且不包含概率因素,因此尚不能简单地用信息的概率计量方法研究地图信息的表示。
2.1.3 量表模型
量表主要用于主观或抽象概念的定量化测量,通过按特殊的规则将数字或序号分配给目标、人、状态或事件,将其特性进行量化。1979年,美国地图学家Robinson在《Elements of Cartography》中提出了4种量表技术[37],即定名量表、顺序量表、间隔量表和比率量表,但在量表的数学定义上仍缺乏描述。文献[38]引入偏序集的概念描述了4种量表的数学定义,见表1。
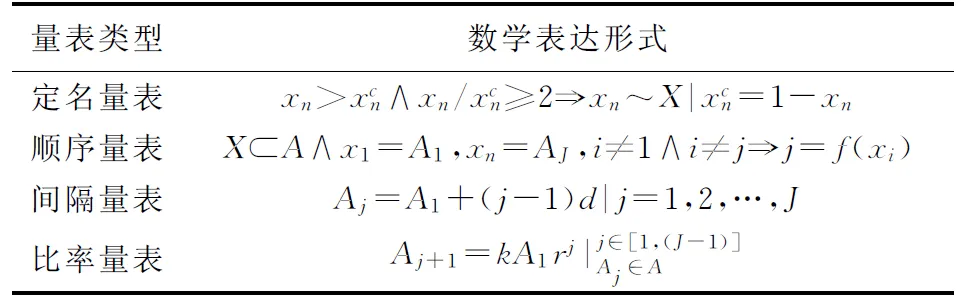
表1 4种量表模型的偏序集表达形式[38]
量表模型在专题图设计中发挥了重要的作用。例如文献[39]根据地理属性的量表性质,将地图设色方案分为定性设色(定名量表)、顺序设色(顺序量表、间距量表和比率量表)和双向设色(间距量表和比率量表)3种方式,通过心理学试验揭示了针对红-绿色盲人群使用的地图设色原则。
2.1.4 基于眼动的需求分析和设计模型
地图学眼动与视觉认知研究已成为地图空间认知研究的重要方法,其目的是探究用户的地图视觉认知机理,设计出能够有效引导用户视觉注意的地图和电子地图。近年来基于眼动追踪对个体差异的研究已经从“专家—新手”差异和性别差异等单一维度扩展到了其他多个维度。文献[40]将试验对象从纸质地图拓展为电子地图、VR等,将地图设计和评价时常见的眼动指标分为信息处理、视觉搜索和认知负担3种,其中信息处理指标包括有注意点数量、总注视时长、平均注视点持续时长、首次进入AOI前用时、AOI内注视点比例和注视频率等,通过对视动跟踪数据聚类分析,支持对用户地图阅读能力和空间行为能力进行定量建模。文献[41]对不同性别、年龄、教育水平、职业和收入的地图用户进行自动分类,为量化分析地图的视觉认知效率提供了参考。但上述研究大多停留在数学分析方法的使用上,对于认知载负量、信息传输效率等概念尚缺乏有效的数学模型。
2.2 感知相似性模型
这一组模型以虚拟地理环境为代表,主要研究“人—实地—虚拟地理环境”三者之间的关系。虚拟地理环境的出现,大大扩展了传统地图在三维表达和动态演变的功能。虚拟地理环境模拟的是地理空间和时间中的事件和过程,受到了地图学家、地理学家的一致推崇[42]。地图学家从可视化的角度研究地形环境仿真,认为可以在人机交互的情况下发挥人脑的形象思维功能[22,43]。地理学家从地理表达和地理试验的角度研究虚拟地理环境,认为虚拟地理环境是从地图和GIS演变而来的新一代地理学语言[21,44]。文献[45]将虚拟地理环境看作“空间认知的新窗口”,认为它是作为空间认知工具的地图在数字化时代自然、合理的延伸与扩展,是数字地图支持下的一种新的空间认知工具。文献[46]认为虚拟地理环境能够缩短用户判读视空特征时的认知距离,更符合人类的认知规律。根据系统仿真科学的相似性理论,本组主要数学模型有客体相似性模型、主体相似性模型、增强现实的时空匹配模型。
2.2.1 客体相似性模型
虚拟环境中的客体相似性模型强调模型表现客观世界中实体和现象的逼真度。系统仿真的相似性理论包含了特征、要素和系统3个层次[47],特征间的相似性用特征值表示。设Uj(a)、Uj(b)反映对应相似元i中某个相似特征j的特征值,特征相似程度rij可表示为
rij=min(Uj(ai),Uj(bi))/max(Uj(ai),Uj(bi))
0≤rij≤1i=1,2,…,n;j=1,2,…,m
(4)
要素间的相似性用相似元数值q(ui)表示为
(5)
式中,k、l分别是相似元ai和bi中特性的数量;n为ai和bi中相似特性的数量;rij为特性间的相似程度;dj为某一特征对单元相似性的影响权重。
系统间的相似性通过相似度Q计算
(6)
式中,K、L分别是原型与模型系统A、B中的单元数量;N为相似元的数量;βi为每一相似元对系统相似度的权重系数。需要注意的是,如果客体相似性模型单纯以几何和物理性质作为评价指标,缺乏“人在环”的影响,那就脱离了空间认知的基本条件,进入单纯数值仿真的领域,不利于虚拟地理环境的发展。
2.2.2 主体相似性模型
主体相似性模型是基于“人在环”的设计思想,从用户感知觉出发关注适人化的虚拟地理环境构建,追求用户感受的完整性与准确性。根据吉布杰的感觉通道分类,主体相似可从视觉、听觉、触觉、味觉、嗅觉、运动觉等多方面表达。由于缺乏人类生理机能上的刺激一致性模型支撑,而人类心理知觉的分辨率又较低,导致主体相似性模型大多数是较为粗略的。
2.2.2.1 多细节层次模型
多细节层次模型(level of detail,LOD)是一种表达视觉协调性的数学模型,核心思想是在不影响视觉感知效果的前提下尽可能降低计算机绘制负荷,例如简化模型中三角形面数。LOD模型分级可以分为与视觉相关和与视觉无关,模型的调度和视点的观察距离、观察角度、运动速度均有着密切的联系。LOD中三角形简化的方法有很多种,如基于顶点或者边的删除法和折叠法等[48]。
2.2.2.2 视点控制模型
灵活的视点控制模型能够显著提升用户的“舒适性”和“沉浸感”。视点(point of view)的人称方式可以分为以下3种:第一人称视点(“我”)、第二人称视点(类“我”)和第三人称视点(“他”)。根据视点与观察目标的关系,可分为9种组合模式[49]:跟踪模式、级联模式、罗盘模式、环绕模式、模拟模式、塔台模式、级联跟踪模式、模拟跟踪模式、组和广域组模式。
2.2.2.3 感知不协调性模型
虚拟环境系统中造成人感知不协调的主要原因有3个,包括非对称刺激的后果、歪曲参考系和不协调刺激作用等[22]。感知不协调对空间认知的影响主要有视觉心理的障碍、影响定量判断和适应程度、时空错觉、多通道不协调和运动感不协调等。在虚拟地理环境构建中要充分考虑和避免感知不协调性,降低用户的认知负荷。
2.2.3 增强现实的时空匹配模型
增强现实是一种通过分析场景特征,将计算生成的几何信息通过视觉融合的方法添加到用户感知的真实世界中的一种技术[50],可以帮助用户拓展时空感知链路从而提升空间认知效率。虚拟建模与真实空间配准问题的核心即求解三维配准矩阵,这是确保增强现实效果的基础,也是主体相似性和客体相似性的有机统一。
多数基于自然特征点的三维配准技术首要工作就是恢复摄像机在场景中的方位信息。通过求解场景中摄像机的方位参数,将摄像机成像中像素坐标与物体空间中世界坐标建立起对应关系,即求解三维配准矩阵[51]。将真实空间的视频信息与GIS相集成是AR发展的新方向[52-53]。
近期发展的数字孪生技术是一种能够实现物理世界与信息世界交互与融合的新技术。具有实时同步、忠实映射、高保真度等特性。数字孪生的本质是实现信息空间和物理世界的等价映射,是虚拟地理环境的最高境界之一。除了设计和构建三维模型库外,要对模型的全生命周期进行实时仿真,并保证仿真与现实的时空一致性。数字孪生五维模型[54]为
MDT=(PE,VE,Ss,DD,CN)
(7)
式中,PE为物理实体;VE为虚拟实体;Ss为服务;DD表示孪生数据;CN表示各组成部分间的连接。需要指出,单纯追求虚拟地理环境与现实环境的高相似度,将一切地理要素三维化并不能完全意义上提高系统的认知效率。只有遵循人类空间认知特点和规律,一方面平衡好仿真的客体相似性和主体相似性;另一方面要考虑仿真系统中对象的全生命周期时空特征,才能更好地推动虚拟地理环境技术发展。
2.3 时空信息体系模型
这一组模型以地理信息流为代表,进一步深化了“人—环境—信息系统”三者的关系。从信息加工流程角度来看,地理信息系统与人脑空间认知的工作原理是相似的,都是信息输入、编码管理、存储记忆、分析决策、结果输出。地理信息系统的空间认知价值在于,提供逻辑思维(建模、分析、计算等)和形象思维(可视化、地图、图表等)两大引擎,为启发使用者的创造性思维提供便利条件[43]。因此,一个服务于空间决策的地理信息系统的设计,应该模拟地理环境信息流在人脑中的处理过程,智能化的地理信息系统更应是人脑空间认知过程的仿真。
2.3.1 基于认知的空间对象表达模型
设计符合人脑空间认知规律的空间对象表达模型,是地理信息系统发展的根本动力之一。
2.3.1.1 从点、线、面、体模型到面向对象的实体模型
地图学家利用几何学理论对空间对象进行抽象建模后得到点、线、面、体模型。以表2模型为例[55],这种该模型可以包含复杂的空间拓扑关系,数据结构简单并易于计算机存储和计算,能够进行空间分析。这种由基础几何要素汇集形成地理实体,从而进行空间分析的过程是一种自下而上进行地图空间认知模型的体现。
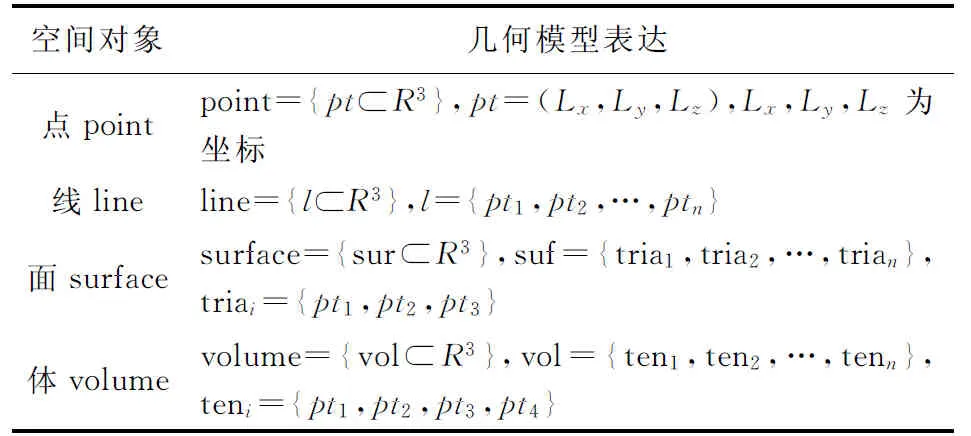
表2 点、线、面、体的几何模型表达[55]
表2中pt为三维空间坐标系的点;每条线l是由点pti构成的集合;每个面suf由三角网格triai构成,而每个三角网格triai可由3个点{pt1,pt2,pt3}表示;每个体vol由四面体teni构成,而每个四面体teni可由4个点{pt1,pt2,pt3,pt4}表示。
但在分析复杂空间关系、表达空间规律时,这种按图幅分割,以几何要素为对象的模型缺乏对地理规律由上而下的认知描述,导致空间实体不完整,难以完成复杂空间分析和推理学习。文献[56]分析地理信息系统中空间分析能力薄弱的原因时指出,传统地理信息系统的“点”“线”“面”模型机制距离人类主观空间的“特征”“对象”“格局”认知机理相差甚远。
面向对象作为计算机科学软件工程领域的一种抽象思维,被众多地理信息系统软件引入地理实体及关系建模中[57-60]。相比点、线、面、体模型,面向对象模型抽象粒度更高,可以表示更为复杂的空间实体和关系。其模型可以简化为[61]
OBJ=〈ID对象标识,MS操作集合,DS数据集合,MI接口〉
(8)
设计面向对象的空间实体模型,其基本出发点是尽可能按照人类认识世界的方法和思维方式来分析和解决问题,通过构建对象类、要素类,使空间数据模型更接近于人类对于真实世界的空间认知结果,空间分析通过操作集合和继承关系定义,空间关系也更为丰富[62-63],涌现出一系列基于空间对象的空间分析[64]和面向对象的空间遥感分析[65]等新方法,以地理实体为对象组织空间信息已成为一种新趋势。
随着地理信息应用广泛进入生产生活,面向对象模型已经难以支撑社会计算、多维一体环境的表达需求。例如,以GeoDatabase为代表的简单的面向对象地理空间数据模型,对于全域多维动态的时空现象表达不足,无法解决多粒度地理实体表达一致性的问题,对长时间序列地理场景的演化分析也支持不够。
2.3.1.2 地理场景模型
近年来,周成虎院士提出的全空间概念涵盖了陆、海、空、天、电磁、网络等泛在空间,目的在于构建全空间认知世界。在全空间信息系统中设计的多粒度时空对象数据模型[66],目的是对动态演化的地理场景提供时空计算和分析功能
ObjPSIS={Compst,Compsl,Compsm,Compcs,Compar,Compca,Compba,Compac}
(9)
式中,ObjPSIS代表全空间信息系统中的多粒度时空对象,各变量分别表示时空对象的8项内容,即时空参照、空间位置、空间形态、组成结构、关联关系、认知能力、行为能力和属性特征。相比而言,文献[25]提出的地理场景概念更加泛化。地理场景是一定地域、时空范围内各种自然要素、人文要素相互联系、相互作用所构成的具有特定结构和功能的地域综合体[25],进一步演化为空间分布模式、演化过程和相互作用机制描述。文献[67—68]尝试引入几何代数理论进行地理场景模型的数学表达,提出基于多重向量的几何-拓扑结构统一的多维地理场景对象自适应表达模型
(10)
式中,⊕仅用于连接多重向量结构下的不同维度对象;Pm、Lk、Sj、Vi分别表示几何代数中的点、线、面、体模型;MVT和MVti表达时间序列。从本质上看,地理场景模型和全空间模型一脉相承,地理场景模型是将全空间模型结合时空推演分析,更关注地理实体的时空分布、动态演化以及地理现象演变机制的推演等,并希望基于此构建新一代空间信息服务。但场景在人的认知过程中是如何存在的,其生理和心理的基本机制尚缺乏清晰的表达,其数学模型的可用性尚待检验。
区别于地理场景模型,文献[69]提出了空间格局模型。空间格局分析以区域性空间为研究范围,其研究结果属于空间认知的顶层形态,目的在于从简单的空间知识中构建出更为复杂的人地关系和社会计算理论,基于时空大数据研究空间格局是一个较好的思路。
2.3.1.3 空间关系知识图谱模型
空间关系是空间认知中重要的组成部分,一般可分为空间几何关系和空间属性关系。传统的空间关系多指空间几何关系,可分为拓扑关系、方位关系和度量关系3种类型[70]。其中方位关系和度量关系计算相对简单,是人们生活中最常使用的空间关系描述形式;拓扑关系是空间认知研究中的难点和重点,是空间推理计算的基础。传统的拓扑关系模型是基于点、线、面模型构建的,可分为RCC(region connection calculus)拓扑关系和求交拓扑关系[71]。前者是基于逻辑推理的公理化拓扑理论,借助组合表实现空间推理,用于空间区域定性表示和推理[72];后者是基于集合理论的数学形式拓扑理论,以9交集模型[73-74]为代表通过空间实体的内部、边界和外部关系进行计算。
随着大数据技术的发展,社会计算以及属性关系得到越来越多人的关注。地理本体理论以整体学、位置论和拓扑学为基础,从本体模型角度设计地理实体及关系。文献[75]提出七元组结构并从宏观和微观两个层次构建地理本体及其逻辑结构
(11)
式中,空间关系以语义关系R、层次关系H和属性特征PC等形式体现。
借助地理本体形式化可以表达实现复杂空间关系、空间位置和空间边界等的一体化表示,代表性成果是地学知识图谱。知识图谱以经典的结构化三元组形式存储现实世界中的实体以及实体之间的关系,通过信息抽取、知识融合和知识加工3个阶段生成知识产品,其三元组可表示为
G=(E,R,S)
(12)
式中,E={e1,e2,…,e|E|}表示实体集合;R={r1,r2,…,r|R|}表示关系集合;S⊆E×R×E表示知识图谱中三元组的集合。地学知识图谱强大的推理功能使得由属性关系自动获取空间知识成为可能,并且可以其将地理现象的特征、联系和成因机制等知识以可视化方式展示出来。目前,地学知识图谱在基于自然语言的空间关系构建、基于场景的知识图谱自动构建等方面尚有不少技术空白。
2.3.2 基于认知的空间数据挖掘模型
空间数据挖掘的本质是空间知识的提炼。空间认知理论上强调3个重要的知识等级:陈述的、程序上的和结构的。地图空间认知中的认知制图构造理论、编码理论和表达理论可以为空间数据挖掘提供指导。
2.3.2.1 基于知识网络的空间知识表达
空间信息由空间数据提取得到,是对空间数据中空间实体属性、数量、位置及其相互关系等描述的解释。空间知识是将多个空间信息关联起来形成的有价值信息。文献[76]提出了地理空间“五个世界”认知模型:物理、逻辑、认知、表达、执行世界,文献[77]在Fonseca世界认知范式上提出空间知识地图的认知模型。认知心理学中将知识分为陈述性知识和程序性知识,二者都以知识网络的形式在人脑中系统化存储[78]。空间知识的获取相应的也有两种方式[79],一种直接由空间数据和空间信息处理和分析得到,另一种则根据现有空间知识推理出新知识。前者多使用关联规则算法、决策树算法、支持向量机等数据挖掘算法;后者可在知识图谱中以知识推理实现。采用马尔可夫逻辑网表达知识时[80-81],其知识可能性表示为
(13)
当g(x)=1时表示该规则是真的,而n(x)则是g(x)为1的数目,Gfi是利用所有原子事实去实例化规则fi后的集合,F为Markov网中所有谓词规则的集合,Z的计算公式为
Z=∑x′∈Xexp [∑fi∈Fωini(x)]
(14)
Z集合了所有可能情况的归一化参数。随着人工智能技术的发展,构建符合人类空间认知习惯的知识推理体系,统一表达静态的空间陈述性知识与可推理扩展的程序性知识,提供空间知识问答和空间智能分析服务,是智能化地理信息系统发展的重要方向。
2.3.2.2 基于可视分析的空间知识发现
地图历来就是时空可视化的最佳工具,虚拟地理环境和地理信息系统中丰富的可视化功能更是符合人空间认知的特点,大数据可视分析技术则为高维信息可视化提供了新平台。文献[82]提出“泛地图”概念,总结出包括空间几何、空间值等11个维度的三元空间中泛地图可视化模型,核心就是传统地图学在泛在空间表达及其内在可视化理论的延伸。时空大数据可视分析方法可分为以数据可视化为主的描述性可视分析、以交互式挖掘为主的解释性可视分析、面向复杂问题协同决策的探索性可视分析3个层次[83]。其中描述性可视化分析方法主要包括轨迹数据可视化分析和网络可视化分析法等;解释性可视分析主要包括交互式降维分析法,直观反映数据聚集模式;探索性可视分析强调从多层次复杂关系网络中挖掘出隐含关系或知识,体现了人类在解决问题时联想、假设与推理的认知过程。
可视分析的主要特征之一是人机交互。交互时充分利用了用户感官刺激和先验认知,前者对应于人类的心理物理学模型,后者则用到了先验知识和知识推理。可视分析正朝可视化智能推理[84]方向发展,根据用户认知推理结果动态调整挖掘规则和参数,能更快更全面地分析出时空数据流下潜藏的知识。
2.4 智能感知制图模型
这一组模型是以面向智能机器人服务的“新地图”为代表,传统的地图空间认知理论面临着空间认知主体、客体、产品的巨大变革。当前空间认知已成为脑科学探索和人工智能发展的交叉点,以智能感知机器地图为代表的“新地图”成为机器人感知空间和空间信息的重要工具[85-87]。不论是移动机器人完成定位及导航任务,还是无人车对道路行驶环境的实时感知和行为处置,乃至月球和火星探测车的自主探测任务,都需要无人控制下的智能环境感知技术。这种面向机器人的新地图与传统面向人的时空产品有着明显的不同,是按照人或动物的空间认知机理设计新型模型,还是构建出全新的机器空间认知模型,值得深入研究。
2.4.1 基于认知细胞的感知制图模型
脑科学和神经科学已经证明鼠类脑细胞中存在具有空间认知功能的边界细胞(border cells)、局部场景细胞(view cells)、网格细胞(grid cells)、速度细胞(speed cells)、位姿细胞(pose cells),在人脑中同样存在空间认知相关区域,如海马体负责认知地图构建,海马旁回负责场景识别,顶叶脑区负责空间想象和注意等。通过研究动物和人脑的空间认知机理,借助仿生学进一步提高机器的环境感知能力,是实现智能感知制图的新思路。
基于鼠类脑细胞的仿生SLAM模型已运用于移动机器人自主导航、空间感知和智能感知制图。文献[88]将具有定位导航功能的细胞应用于SLAM研究中,构建一种基于多细胞导航机制的BVGSP-SLAM模型;文献[89]基于海马结构空间细胞的认知机理提出了一种构建精确的环境认知地图的方法,构建出半拓扑认知地图。该认知地图由具有拓扑关系的认知点e构成,每个认知点e由当前点位位置细胞放电活动pi、视觉模板Vi和位置间的拓扑关系di构成,新的认知点ej由认知点间的拓扑联系tij={Δdij}生成,即
(15)
2.4.2 基于认知计算的感知制图模型
认知计算(cognitive computing)是新一代智能系统具有的典型特征,既包括在功能层面具备人类的某些认知能力,能够出色完成特定认知任务的系统;也包括在结构层面借鉴人类大脑特征设计出非冯·诺依曼架构计算机,更有效地进行认知所需的存储和运算。结合人脑空间认知机理构建基于认知计算的空间分析功能,实现空间数据的类脑存储和计算一体化,研究新一代空间智能感知芯片和系统,是空间信息领域的智能化发展方向。
表征-计算是当代认知科学探索中的重要命题,传统认知制图中也有相关的空间行为计算模型(CPMs)、连接神经网络模型、互表现模型(IRN)等。文献[90]提出基于物理符号的认知计算模型,近年来随着现代神经影像学技术的发展又提出了多种基于神经信号的认知计算模型。其中,神经动力学的网络计算模型较为常用[91]。
基于认知计算和智能芯片的感知制图技术,将在多通道智能交互、空间环境自主感知与建模等领域广泛应用。西安交通大学将视觉认知中的信息处理和联想记忆机制用于解决类脑计算问题[92],提出“直觉性AI”概念,通过构造融合场景感知和情境认知的情境计算框架,解决无人驾驶中环境交互和行为决策问题。清华大学融合脉冲神经网络与人工神经网络设计新型类脑计算芯片[93],实现视觉、听觉等多通道信息的协同处理和分析,已具备语音识别和目标探测追踪功能,在无人自行车驾驶测试中实现自主避障和跟随。
3 结论与展望
作为地图学和地理信息系统的重要基础理论,地图空间认知理论研究面临着巨大的机遇和挑战。面对新时期纷繁的地理空间信息应用场景和复杂泛在空间应用需求,新时期的地图学已在大数据和人工智能等技术推动下,发展出一系列全新地图形式和产品,诸如满足自动驾驶需求的高精度地图,满足室内机器人导航的实时场景感知地图,基于地理本体的地学知识图谱,结合5G和智能芯片的空间信息类脑存储和计算等。
目前,数学基础的不足已成为制约地图空间认知理论深入发展的瓶颈,难以满足泛在空间的抽象和模拟、空间知识发现和推理、机器平台的智能感知与制图应用的需求。因此,广泛引入人脑生理物理学和计算机科学的最新成果,深入研究泛在空间表达、分析和决策的空间认知机理,设计更加符合人和机器认知规律的新型地图空间认知数学模型,将是地图空间认知理论和技术研究的重心。
猜你喜欢
四川党的建设(2022年8期)2022-04-28
速读·下旬(2021年11期)2021-10-12
大科技·百科新说(2021年1期)2021-03-29
小学生学习指导(低年级)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
大东方(2019年12期)2019-10-20
作文大王·低年级(2018年10期)2018-12-06
科学与财富(2017年22期)2017-09-10
商情(2017年1期)2017-03-22
小猕猴智力画刊(2016年5期)2016-05-14
